") NVIDIA AI Perception面向ROS開發(fā)者
NVIDIA AI Perception面向ROS開發(fā)者
所有移動(dòng)的事物都將變得自主化。 所有自主化的事物都需要先進(jìn)的實(shí)時(shí)感知。
NVIDIA宣布,向ROS開發(fā)者社區(qū)提供整套感知技術(shù)。對(duì)于尋求將先進(jìn)計(jì)算機(jī)視覺和AI/ML功能納入基于ROS的機(jī)器人應(yīng)用程序的開發(fā)人員來說,這將縮短開發(fā)時(shí)間并提高性能。
Open Robotics將擴(kuò)展用于NVIDIA AI的ROS
Open Robotics首席執(zhí)行官Brian Gerkey表示:“隨著越來越多的ROS開發(fā)人員利用硬件平臺(tái),這些平臺(tái)包含額外的計(jì)算功能,旨在減輕主機(jī)CPU的負(fù)擔(dān),ROS正在發(fā)展,以更容易有效地利用這些先進(jìn)的硬件資源。我們與NVIDIA這樣的加速計(jì)算領(lǐng)導(dǎo)者合作,以及其在人工智能和機(jī)器人技術(shù)創(chuàng)新方面的豐富經(jīng)驗(yàn),將為整個(gè)ROS社區(qū)帶來很大益處。”
NVIDIA和Open Robotics已達(dá)成協(xié)議,將在NVIDIA Jetson邊緣AI平臺(tái)和基于GPU的系統(tǒng)上加速ROS 2性能,并在 Omniverse 上實(shí)現(xiàn) Open Robotics 的 Ignition Gazebo 和 NVIDIA Isaac Sim 之間的無縫模擬互操作性。
NVIDIA Jetson 平臺(tái)在很多應(yīng)用領(lǐng)域中被機(jī)器人專家廣泛采用。它旨在為機(jī)器人提供高性能、低延遲的處理,使其具有響應(yīng)性、安全性和協(xié)作性。Open Robotics將通過升級(jí)ROS 2來高效管理位于NVIDIA Jetson平臺(tái)上的GPU和其他處理器之間的數(shù)據(jù)流并共享內(nèi)存,使負(fù)責(zé)實(shí)時(shí)處理攝像頭和激光雷達(dá)等傳感器高帶寬數(shù)據(jù)的應(yīng)用性能得到大幅提升。
除了增強(qiáng)機(jī)器人應(yīng)用在Jetson上的部署,Open Robotics和NVIDIA正在制定整合 Ignition Gazebo 和 NVIDIA Isaac Sim 的計(jì)劃。NVIDIA Isaac Sim已支持開箱即用的ROS 1和2,并通過連接Blender和Unreal Engine 4等流行應(yīng)用來創(chuàng)建一個(gè)至關(guān)重要的3D內(nèi)容生態(tài)系統(tǒng)。
Ignition Gazebo數(shù)十年來在整個(gè)機(jī)器人界,包括在正在進(jìn)行的DARPA Subterranean Challenge等高知名度比賽中創(chuàng)造了許多紀(jì)錄。
通過連接這兩個(gè)模擬器,ROS開發(fā)者可以輕松地在Ignition Gazebo和Isaac Sim之間移動(dòng)他們的機(jī)器人和環(huán)境以運(yùn)行大型模擬,還可以使用高保真動(dòng)力學(xué)、精確傳感器模型和逼真渲染等兩個(gè)模擬器的先進(jìn)功能來生成用于訓(xùn)練和測(cè)試AI模型的合成數(shù)據(jù)。
此次合作所產(chǎn)生的軟件預(yù)計(jì)將于2022年春季發(fā)布。
為ROS發(fā)布的Isaac GEM速度顯著加快
用于ROS的Isaac GEM是一款使ROS開發(fā)者更容易在Jetson平臺(tái)上構(gòu)建高性能解決方案的硬件加速包。這些GEM專注于提高圖像處理和基于DNN的感知模型的吞吐量,而后者對(duì)機(jī)器人專家而言正變得日益重要。這些軟件包減少了主機(jī)CPU的負(fù)載,同時(shí)顯著提升了性能。
用于ROS的全新Isaac GEM包含:
SGM Stereo Disparity和 Point Cloud
色彩空間轉(zhuǎn)換和鏡頭畸變校正
Isaac Sim的新功能為ROS開發(fā)者提供便利
最新版本的Isaac Sim包含對(duì)ROS開發(fā)者社區(qū)的重要支持,其中比較引人注目的是ROS2導(dǎo)航棧和MoveIt運(yùn)動(dòng)規(guī)劃框架。這些示例今天即開放使用,并可在Isaac Sim文檔中找到:
Isaac Sim中的ROS示例列表
ROS 四月標(biāo)簽
ROS立體相機(jī)
ROS導(dǎo)航
ROS TurtleBot3 示例
ROS Manipulation和Camera Sample
ROS 服務(wù)
MoveIt 運(yùn)動(dòng)規(guī)劃框架
本機(jī) Python ROS 使用
ROS2 導(dǎo)航
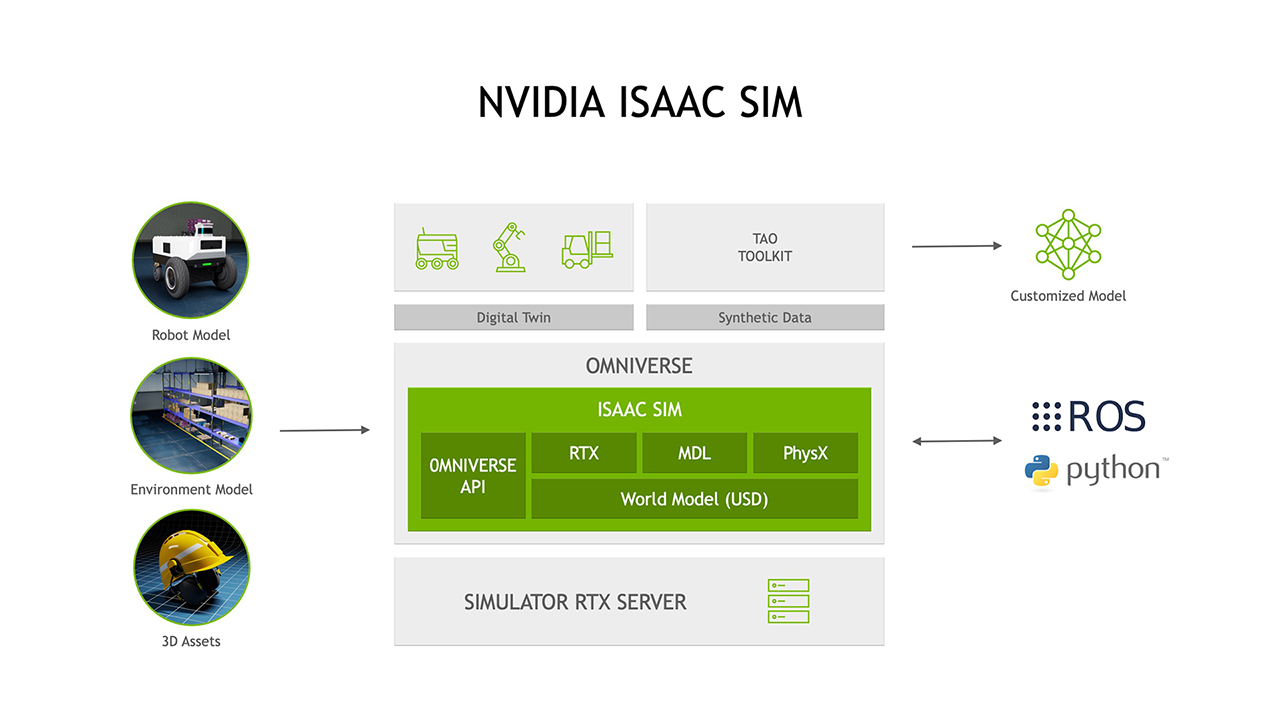
圖 2 。 Omniverse 上 ISAAC Sim 的功能框圖,顯示機(jī)器人模型、環(huán)境模型和 3D 資源輸入。
Isaac Sim生成用于訓(xùn)練感知的合成數(shù)據(jù)集
除了作為一個(gè)機(jī)器人模擬器之外,Isaac Sim還具備一套強(qiáng)大的功能,可以生成合成數(shù)據(jù)來訓(xùn)練和測(cè)試感知模型。隨著機(jī)器人專家將更多的感知功能集成到他們的平臺(tái),這些功能將變得更加重要。顯然,機(jī)器人對(duì)環(huán)境的感知能力越強(qiáng),它的自主性就越強(qiáng),所需的人為干預(yù)就越少。
一旦Isaac Sim生成了合成數(shù)據(jù)集,就可以將它們直接輸入NVIDIA TAO(一個(gè)AI模型自適應(yīng)平臺(tái)),從而根據(jù)機(jī)器人的具體工作環(huán)境調(diào)整感知模型。在從目標(biāo)環(huán)境中采集任何實(shí)際數(shù)據(jù)之前,就可以確保機(jī)器人的感知棧在特定工作環(huán)境中的表現(xiàn)。
長(zhǎng)期以來,機(jī)器人專家在連接和集成經(jīng)典機(jī)器人任務(wù)(如導(dǎo)航)和AI感知棧方面一直面臨著各種挑戰(zhàn)。Isaac Sim通過同時(shí)作為機(jī)器人和合成數(shù)據(jù)生成工具并與TAO訓(xùn)練平臺(tái)進(jìn)行集成解決了這一工作流程挑戰(zhàn)。
關(guān)于作者
Gerard Andrews 是專注于機(jī)器人開發(fā)社區(qū)的高級(jí)產(chǎn)品營(yíng)銷經(jīng)理。在加入 NVIDIA 之前,Gerard在Cadence擔(dān)任產(chǎn)品營(yíng)銷總監(jiān),負(fù)責(zé)許可處理器IP的產(chǎn)品規(guī)劃、營(yíng)銷和業(yè)務(wù)開發(fā)。他擁有佐治亞理工學(xué)院電子工程碩士學(xué)位和南方衛(wèi)理公會(huì)大學(xué)電子工程學(xué)士學(xué)位。
審核編輯:郭婷
-
處理器
+關(guān)注
關(guān)注
68文章
19349瀏覽量
230295 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28524瀏覽量
207552 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5025瀏覽量
103266
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
NVIDIA發(fā)布小巧高性價(jià)比的Jetson Orin Nano Super開發(fā)者套件
云端AI開發(fā)者工具怎么用
NVIDIA生成式AI進(jìn)入ROS社區(qū)
NVIDIA RTX AI套件簡(jiǎn)化AI驅(qū)動(dòng)的應(yīng)用開發(fā)
谷歌:聚焦AI與技術(shù)創(chuàng)新,攜手中國(guó)開發(fā)者共筑未來
揭秘NVIDIA AI Workbench 如何助力應(yīng)用開發(fā)

NVIDIA將全球數(shù)百萬開發(fā)者轉(zhuǎn)變?yōu)樯墒?AI 開發(fā)者
NVIDIA NIM 革命性地改變模型部署,將全球數(shù)百萬開發(fā)者轉(zhuǎn)變?yōu)樯墒?AI 開發(fā)者

2024 TUYA全球開發(fā)者大會(huì)盛大啟幕,Cube AI大模型重磅首發(fā)!

NVIDIA與微軟擴(kuò)展合作,幫助開發(fā)者更快構(gòu)建和部署AI應(yīng)用
潤(rùn)和軟件HopeOS閃耀亮相鯤鵬昇騰開發(fā)者大會(huì)2024

MediaTek 天璣開發(fā)者大會(huì)MDDC 2024啟幕
開發(fā)者手機(jī) AI - 目標(biāo)識(shí)別 demo
與NVIDIA深度參與GTC,向量數(shù)據(jù)庫(kù)大廠Zilliz與全球頂尖開發(fā)者共迎AI變革時(shí)刻
華為宣布HarmonyOS NEXT鴻蒙星河版開發(fā)者預(yù)覽面向開發(fā)者開放申請(qǐng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論