 簡述ARM微處理器的隧道照明智能控制器
簡述ARM微處理器的隧道照明智能控制器
引 言
隧道是高速公路的重要組成部分,隧道照明系統是車輛能夠安全地進入、通過和離開隧道區域必不可少的基本保證。目前長隧道的照明分為入口段、過渡段、基本段、出口段,每段的燈具按功能又分為應急燈、全日燈和加強燈三種。應急燈除在停電時用作應急照明外還兼作全日照明,全日燈24小時不間斷工作,加強燈根據洞口不同的亮度來開啟。
隧道內不同區域的亮度要求各不相同,它們和洞外亮度、交通流量、洞內廢氣的多少、行車速度、燈具的養護周期等諸多因素有關,甚至與路面的材料和洞壁的裝修材料有關。這些燈的控制目前基本上是靠開關照明回路來進行控制的。一般隧道都有七八個照明控制回路,建設投資大,施工難度高,隧道開通后管理者僅能在有限的回路里進行控制,很難兼顧到運營成本和隧道安全。
我們采用Philips公司(編者注:現更名為NXP公司)的基于ARM7 TDMI-S 內核的微控制器LPC2119設計實現智能照明控制器,應用在高速公路隧道照明CAN網絡中,較好地解決了隧道照明初期投資、運營成本和隧道安全之間的矛盾,收到了很好的經濟效益和社會效益。
隧道照明系統CAN 網絡的構成
CAN(控制器局域網)是當今國際上應用最廣泛的現場總線之一。CAN總線最初是由德國Bosch公司為汽車的檢測、控制系統而設計的。由于CAN總線具有獨特的設計思想、良好的功能特性和極高的可靠性,現場抗干擾能力強,已由國際標準組織ISO制訂了CAN總線的國際標準。
CAN協議是建立在國際標準組織ISO的開放系統互連參考模型OSI基礎上,主要工作在物理層、數據鏈路層和應用層。用戶可在其基礎上根據實際需要開發自己的應用層通信協議。CAN總線信號的傳輸可采用雙絞線、同軸電纜或光纖,最高通信速率可達1Mbps,數據傳輸在5Kbps 時,傳輸距離可達到10Km。一個CAN網段上的網絡節點可達110個,還可通過CAN網關/網橋延伸網段或和其他各種網絡互連互通。
CAN總線的這些特點使得其很適宜應用在條件苛刻的高速公路隧道監控系統或照明控制系統中。高速公路隧道照明控制系統CAN網絡主要由上位機、智能照明控制器、CAN網關/網橋等構成(圖1)。
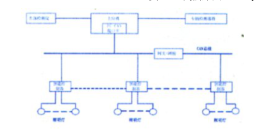
圖1 隧道照明控制系統CAN網絡構成
上位機為PC機,內插PC-CAN 接口卡,網絡拓撲采用總線結構,傳輸介質采用雙絞線,為提高系統的抗干擾能力,在傳輸介質和智能控制器之間采取了光電隔離。上位機并與隧道車輛檢測器群和光強檢測儀相連,配以我們開發的相應軟件,對整個隧道的照明系統進行智能控制。
軟件的控制策略如下:在沒有車輛進入隧道時,根據光強檢測儀所檢測到的洞內外光強差值,在隧道內只開啟相應的基本照明,當車輛檢測器檢測到車輛將進入隧道時,開啟隧道洞口的加強照明,當車輛進入隧道后,則將車輛前面一段相應距離的加強照明開啟,一旦后面無車輛跟進,則將汽車身后的加強照明關閉。
同時利用光強儀還可判斷晴天、陰天、白天、晚上而開啟或關閉相應的照明。可對單個的照明進行單控也可對區域照明進行群控。控制策略隨時可根據實際情況進行修正。這樣節約了大量的電能,有效的降低了運營成本。
智能照明控制器硬件設計
圖1是本智能控制器的總體設計框圖,主要由CPU模塊、電源模塊、通信模塊、光強檢測模塊、溫度檢測模塊、電流檢測模塊、開關控制模塊等組成。通信模塊將所有的控制器連接成一個完整的網絡,便于值班員在監控室對整個照明系統進行遠程控制,光強、溫度、電流檢測則是通過對這幾個參數的檢測來判斷設備的工作情況,開關控制模塊則是通過光電耦合、大功率可控硅開關進行控制的。
CPU 模塊
本智能控制器的核心采用了Philips公司的LPC2119微處理器,其采用ARM公司 ARM7TDMI-S 內核,基于RISC精簡指令集的微處理器,具有32位總線寬度,內置16KB的SRAM,128 KB Flash 存儲器。通過片內PLL對片外晶振的倍頻,可實現最大為60MHz 的 CPU 操作頻率。
同時通過片內Boot裝載程序可實現ISP在系統編程和IAP在應用編程功能。由于LPC2119 較小的64引腳封裝、極低的功耗、多個32 位定時器、4 路10位ADC、2路CAN、8路10位ADC、以及多達9 個外部中斷使它們能很好的滿足系統的設計需要。系統硬件電路如圖2所示。
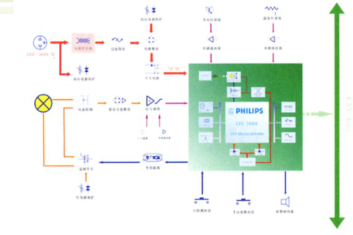
圖2 智能照明控制器框圖
電源模塊
LPC2119 為雙電源,CPU 操作電壓范圍:1.65~1.95 V(1.8 V± 0.15 V),I/O 操作電壓范圍:3.0~3.6 V(3.3 V± 10%),可承受5V 電壓,而溫度傳感器和光電傳感器及光耦隔離器均需5V直流電源驅動,故在設計電源模塊時必須提供5V、3.3V和1.8V的直流電源。在電源電路里加入了整流橋和穩壓模塊,并采用電源隔離器B0505S將輸入和輸出電源相隔離,以屏蔽電源噪聲的影響。
通信模塊
高速公路中長隧道一般都在1至2公里左右,特長隧道甚至達到十幾公里。隧道燈的數量也從數百盞至數千盞不等。加上隧道內環境條件惡劣,而RS-485通信存在抗干擾能力差,誤碼率高,無糾錯重發機制,通信距離短,不方便擴展等缺點,因此這里采用RS485通信網絡并不合適。LPC2119內部集成了2個CAN控制器,這給我們采用CAN網絡提供了便利。
CAN通信速率高、開放性好、通信距離長,且具有多主站運行和分散仲裁的串行總線以及廣播通信的特點,與其它通信總線相比,CAN總線數據通信具有突出的高可靠性、實時性和靈活性。我們通過CAN總線還可以把通風機、車行橫洞卷簾門等相關設備的控制集成在一起。
光強、溫度、電流檢測模塊
LPC2119 內部集成了四路10位A/D轉換器,這就給光強、溫度、電流檢測提供了極大的便利。光強檢測是通過光敏三極管來檢測環境亮度參數提供給主程序進行自動控制,也可通過此參數判斷光源的好壞。溫度參數提供設備本身和周邊環境溫度,以求設備安全可靠的工作。電流參數則是對光源的工作狀態進行不斷的監測,交流信號經過互感器、信號調理后直接送入LPC2119內部集成的A/D轉換器進行電流參數的采集和變換。
開關控制模塊
LPC2119提供了多達46個通用的I/O 口,因此對照明燈進行控制是非常方便的。一個照明控制器可以根據實際情況分別或同時控制4盞、8盞、16盞照明燈。LPC2119是通過固態繼電器來對照明燈進行控制的。
為了增強系統的抗干擾性,本照明控制器采用了光電隔離技術,所有的輸出均采用了光電耦合器將干擾信號隔離,有效地提高了系統的可靠性。同時由于CPU 的I/O驅動能力有限,一般不足以驅動一些電磁執行器件,需加接驅動接口電路,為避免系統受到干擾,須采取隔離措施。如本例晶閘管所在的主電路是交流強電回路,電壓較高,電流較大,不易與CPU 直接相連,可應用光耦合器將CPU的控制信號與晶閘管觸發電路進行隔離。光耦隔離驅動電路如圖3所示。
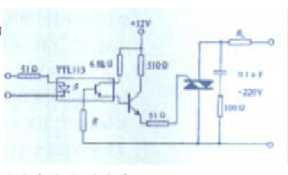
圖3 雙向可控硅隔離驅動
結語
本文介紹的智能照明控制器性能穩定,工作可靠。同時可通過CAN網絡由上位機結合光強儀、車輛檢測器等進行智能控制,在隧道的建設或改造中,都可以使隧道照明的回路減到最少,不僅節約了初期投資,而且在運行期間可以大大的節約電能消耗。本智能照明控制器已開發出單回路、雙回路、四回路、八回路等系列產品,并已搭建成模擬網絡通過了測試,目前正在與某高速公路隧道業主商談實際應用。
參考文獻:
1. LPC2119 User Manual 。
2. 周立功,ARM微控制器基礎與實踐,北京航空航天大學出版社,2003
3. 鄔寬明,CAN總線原理和應用系統設計,北京航空航天大學出版社,1997
編輯:jq
-
cpu
+關注
關注
68文章
10880瀏覽量
212217 -
CAN
+關注
關注
57文章
2757瀏覽量
463921 -
ARM7
+關注
關注
3文章
207瀏覽量
50376 -
ISO
+關注
關注
0文章
262瀏覽量
39613
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論