

雜波和干擾的有效抑制已經(jīng)成為雷達信號處理的一個主要研究方向。現(xiàn)代雷達面臨的雜波環(huán)境相當復(fù)雜,普通的動目標對消系統(tǒng)主要是對固定的地物雜波有一個很好的抑制效果,但對像氣象、海浪、箔條等具有一定速度的運動雜波而言,雜波譜的中心會偏離零多普勒頻率,如不采取有效措施,將無法很好地消去這類雜波[1-2]。因此考慮到雜波的運動性、區(qū)域性及時變性,為自適應(yīng)地抑制低速運動雜波,建立動態(tài)雜波速度譜圖是一個很好的選擇。
現(xiàn)有的文獻對雜波輪廓圖和雜波幅度圖研究較多[3-6]。雜波輪廓圖可以用來選擇正常支路和MTD(或MTI)相參處理支路,在雜波輪廓圖內(nèi)的數(shù)據(jù)采用相參信號處理后輸出,在雜波輪廓圖之外的部分采取正常支路輸出,從而提高弱小目標在弱雜波或無雜波條件下的檢測能力[6]。
雜波幅度圖可以用在恒虛警檢測中。參考文獻[7]和參考文獻[8]對三維立體雜波圖的形成與應(yīng)用進行了研究。而目前對雜波速度圖的研究相對較少。
1 自適應(yīng)雜波抑制技術(shù)
對于運動雜波,在計算得到其多普勒頻率之后,抑制雜波的方法一般有兩種[9]:(1)對回波信號u(t)進行運動雜波譜中心補償,將運動雜波譜中心移動到零頻,再用凹口位于零頻的MTI濾波器抑制運動雜波;(2)直接采用凹口位于fd處的MTI濾波器來抑制運動雜波,而凹口于fd處的MTI濾波器權(quán)系數(shù)可預(yù)先存儲在一個濾波器權(quán)系數(shù)庫中,如圖1所示。
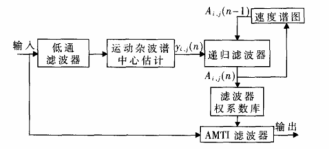
不管是對運動雜波進行多普勒中心補償,還是利用權(quán)庫法,都需要計算出運動雜波譜中心,即運動雜波的速度。因此在這里設(shè)計了一種求雜波速度譜圖的方法,統(tǒng)計緩慢移動雜波的速度,將雜波的多普勒中心頻率存儲,利用FPGA的高效處理能力,通過軟件編程的方法實現(xiàn)雜波速度譜圖的建立,工程實現(xiàn)方便。
2 速度譜圖的實現(xiàn)
求雜波速度的方法有多種,一種是經(jīng)典的譜估計FFT法,速度精度與FFT的點數(shù)有關(guān)。在信號重頻已知的情況下,F(xiàn)FT點數(shù)越高速度分辨精度越高。還可以用arctan求相位差的方法求雜波速度,在求解反正切函數(shù)的運算中,傳統(tǒng)的方法有查表法、多項式近似法、查表與多項式結(jié)合法、逐位法等[10]。然而,這些方法在速度和精度上達不到要求并且硬件實現(xiàn)困難。
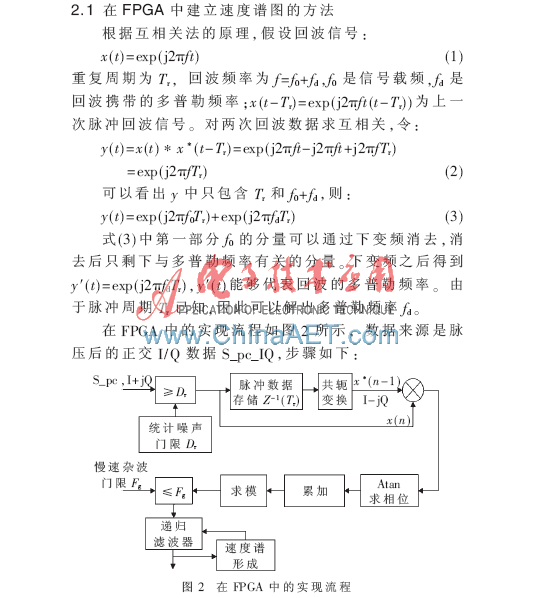
為了方便在FPGA中實現(xiàn),適合FPGA中的操作流程,本設(shè)計選擇互相關(guān)法進行多普勒速度的求解。
3 仿真與實驗結(jié)果分析
本實驗利用雷達采集到的真實回波數(shù)據(jù)進行處理分析。圖3顯示的是雷達原始回波數(shù)據(jù)圖像,縱坐標是距離單元,橫坐標是脈沖數(shù),灰度代表回波強度。其中在距離單元為160處有一個運動目標,而在距離單元為100處有一個靜止的大物體,其回波強度遠大于運動目標的回波強度。
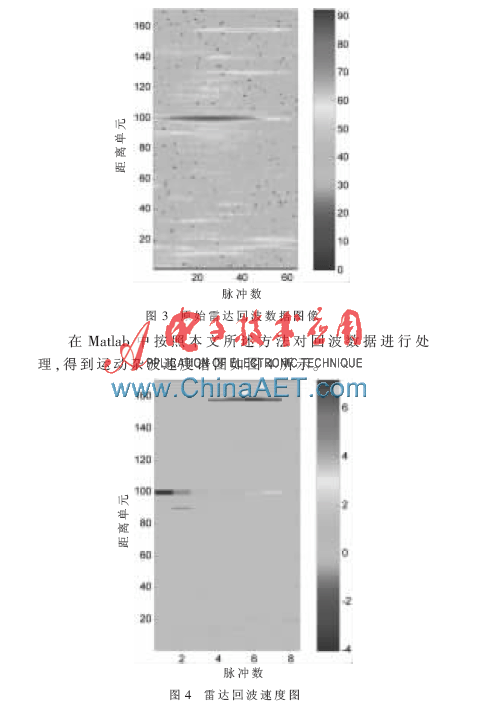
從圖4中可以很方便地看出各個距離單元的速度,在距離單元為100處有一個緩慢的速度變化過程,是由于天線掃描調(diào)制所引起的。此雜波速度圖為抑制靜止物體回波和緩慢運動雜波提供了良好的依據(jù),可以有效地檢測出快速運動目標。
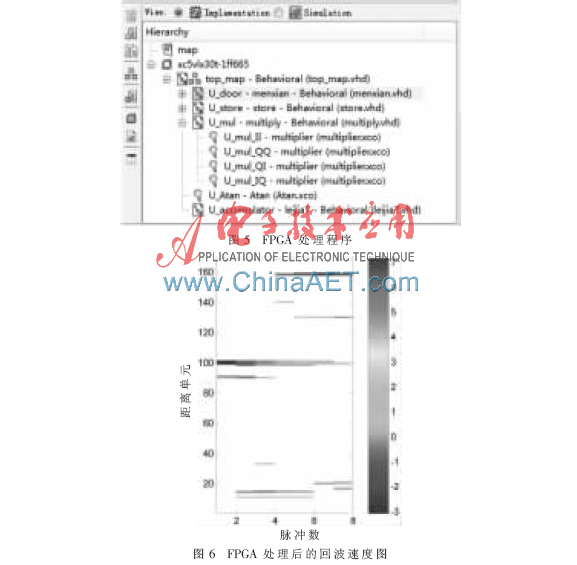
在ISE開發(fā)環(huán)境中進行編程,F(xiàn)PGA處理程序如圖5所示。將雷達數(shù)據(jù)通過ISIM導(dǎo)入到ISE中,對回波數(shù)據(jù)在FPGA處理之后,再利用Matlab畫出其速度譜圖,如圖6所示。可以看出,通過硬件處理之后的速度圖與仿真結(jié)果吻合,驗證了此方法的可行性。
本文主要研究了一種雜波速度譜圖的建立方法,目的是統(tǒng)計緩慢移動的雜波速度,將雜波的多普勒中心頻率存儲,可以用來補償運動雜波的速度或者結(jié)合權(quán)系數(shù)庫完成雜波的自適應(yīng)抑制。利用可編程器件FPGA高效的并行處理能力,通過VHDL軟件編程的方法實現(xiàn)雜波速度譜圖的建立,實現(xiàn)方便,對工程應(yīng)用具有一定的指導(dǎo)意義。
參考文獻
[1] 韓棟,湯建龍。基于雜波多普勒相位估計補償?shù)腁MTI方法[J]。電子科技,2011,24(1):68-70.
[2] 李濤,鐘志峰,黃堅。一種新的雷達動目標檢測方法[J]。微型機與應(yīng)用,2012,31(17):72-74.
[3] Chen Xiaolong,Huang Yong,Guan Jian,et al.Sea clutter suppression and moving target detection method based on clutter map cancellation in FRFT domain[C].2011 IEEE CIE International Conference,2011,1:438-441.
[4] HOURIA M,M′HAMED H,F(xiàn)ATIHA Y E.A real time implementation on FPGA of a clutter map CFAR detector[C]。 Radar Symposium(IRS),2011 Proceedings International,IEEE,2011:207-211.
[5] 王雪,雷卓,歐陽耀果。基于雷達雜波圖的CFAR算法[J]。火控雷達技術(shù),2010,39(4):52-55.
[6] 劉俊濤,侯穎妮,宋萬杰,等。輪廓雜波圖恒虛警處理中面雜波性能分析[J]。電子學報,2006,34(9):1649-1652.
[7] 閆修林,阮增苗。雜波圖技術(shù)在雷達終端信號處理中的應(yīng)用[J]。現(xiàn)代雷達,2004,26(5):34-36.
[8] 劉俊濤,宋萬杰,吳順君。基于FPGA三維雜波圖的設(shè)計與實現(xiàn)[J]。現(xiàn)代雷達,2005,27(12):17-20.
[9] 吳順君,梅曉春。雷達信號處理和數(shù)據(jù)處理技術(shù)[M]。北京:電子工業(yè)出版社,2008.
[10] 駱艷卜,張會生,張斌,等。一種CORDIC算法的FPGA實現(xiàn)[J]。計算機仿真,2009,26(9):305-307.
編輯:jq
-
FPGA
+關(guān)注
關(guān)注
1641文章
21912瀏覽量
611721 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7232瀏覽量
90714 -
FFT
+關(guān)注
關(guān)注
15文章
440瀏覽量
60295 -
MTI
+關(guān)注
關(guān)注
0文章
6瀏覽量
7634
發(fā)布評論請先 登錄
相關(guān)推薦
ads5402模擬輸入懸空時采集到的雜波很小,接入模擬信號后,雜波變得不正常,是哪里的問題?
氦質(zhì)譜檢漏方法簡介及方法選擇
做一個信號發(fā)生器,用FPGA產(chǎn)生正弦數(shù)字信號,然后選用DAC8830作為數(shù)字轉(zhuǎn)模擬,有雜波的原因?
ADC0XD1520RB輸出信號有概率出現(xiàn)尖峰雜波怎么解決?
機載雷達的“雜波模型”
常見氦質(zhì)譜檢漏儀故障及解決方法
汽車雷達回波發(fā)生器的技術(shù)原理和應(yīng)用場景
LMX2595在所需頻端周圍出現(xiàn)很多雜波的原因?
【AG32開發(fā)板體驗連載】雷達實現(xiàn)與控制
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
雜波抑制的方法有哪些種類
交流電源雜波抑制的方法有哪些
基于FPGA的激光雷達控制板






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論