

SANXIN-B01 Verilog教程-郝旭帥團(tuán)隊(duì)
SPI是串行外設(shè)接口(Serial Peripheral Interface)的縮寫。SPI,是一種高速的,全雙工,同步的通信總線,并且在芯片的管腳上只占用四根線,節(jié)約了芯片的管腳,同時(shí)為PCB的布局上節(jié)省空間,提供方便,正是出于這種簡(jiǎn)單易用的特性,如今越來越多的芯片集成了這種通信協(xié)議。
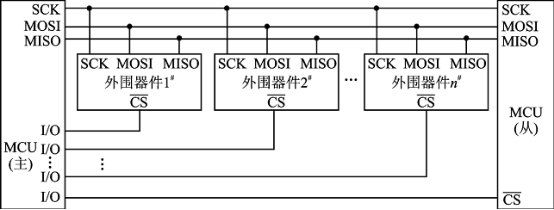
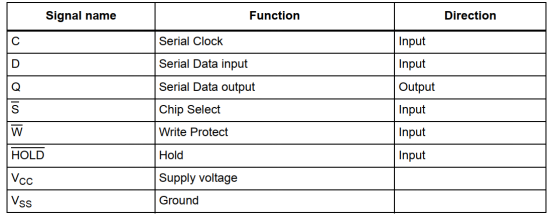
SPI的通信原理很簡(jiǎn)單,它以主從方式工作,這種模式通常有一個(gè)主設(shè)備和一個(gè)或多個(gè)從設(shè)備,中間靠三線或者四線連接(三線時(shí)為單向傳輸或者數(shù)據(jù)線雙向傳輸)。所有基于SPI的設(shè)備共有的,它們是MISO、MOSI、SCLK、CS。
MISO– Master Input Slave Output,主設(shè)備數(shù)據(jù)輸入,從設(shè)備數(shù)據(jù)輸出。
MOSI– Master Output Slave Input,主設(shè)備數(shù)據(jù)輸出,從設(shè)備數(shù)據(jù)輸入。
SCLK – Serial Clock,時(shí)鐘信號(hào),由主設(shè)備產(chǎn)生。
CS – Chip Select,從設(shè)備使能信號(hào),由主設(shè)備控制。
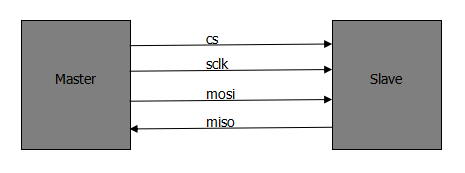
cs是從芯片是否被主芯片選中的控制信號(hào),也就是說只有片選信號(hào)為預(yù)先規(guī)定的使能信號(hào)時(shí)(高電位或低電位),主芯片對(duì)此從芯片的操作才有效。這就使在同一條總線上連接多個(gè)spi設(shè)備成為可能。
通訊是通過數(shù)據(jù)交換完成的,由sclk提供時(shí)鐘脈沖,mosi、miso則基于此脈沖完成數(shù)據(jù)傳輸。數(shù)據(jù)輸出通過 mosi線,數(shù)據(jù)在時(shí)鐘上升沿或下降沿時(shí)改變,在緊接著的下降沿或上升沿被讀取。完成一位數(shù)據(jù)傳輸,輸入也使用同樣原理。因此,至少需要N次時(shí)鐘信號(hào)的改變(上沿和下沿為一次),才能完成N位數(shù)據(jù)的傳輸。
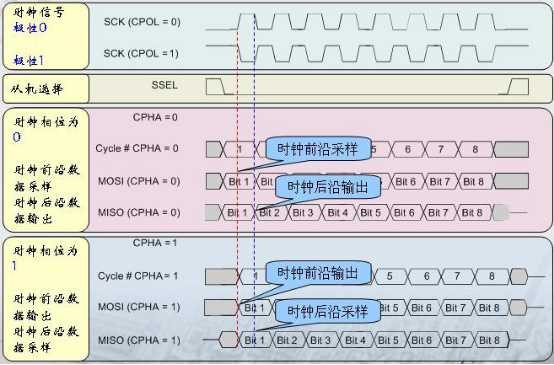
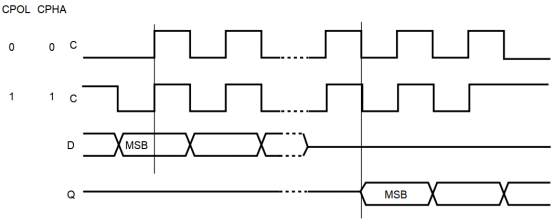
spi通信有四種不同的模式,不同的從設(shè)備可能在出廠時(shí)就已經(jīng)配置為某種模式。通信的雙方必須是工作在同一模式下,所以我們可以對(duì)主設(shè)備的spi模式進(jìn)行配置,通過CPOL(時(shí)鐘極性)和CPHA(時(shí)鐘相位)來控制我們主設(shè)備的通信模式。
mode0:CPOL=0,CPHA=0;
mode1:CPOL=0,CPHA=1;
mode2:CPOL=1,CPHA=0;
mode3:CPOL=1,CPHA=1;
時(shí)鐘極性CPOL是用來配置SCLK在空閑時(shí),應(yīng)該處于的狀態(tài);時(shí)鐘相位CPHA用來配置在第幾個(gè)邊沿進(jìn)行采樣。
CPOL=0,表示在空閑狀態(tài)時(shí),時(shí)鐘SCLK為低電平。
CPOL=1,表示在空閑狀態(tài)時(shí),時(shí)鐘SCLK為高電平。
CPHA=0,表示數(shù)據(jù)采樣是在第1個(gè)邊沿。
CPHA=1,表示數(shù)據(jù)采樣是在第2個(gè)邊沿。
即:
CPOL=0,CPHA=0:此時(shí)空閑態(tài)時(shí),SCLK處于低電平,數(shù)據(jù)采樣是在第1個(gè)邊沿,也就是SCLK由低電平到高電平的跳變,所以數(shù)據(jù)采樣是在上升沿,數(shù)據(jù)發(fā)送是在下降沿。
CPOL=0,CPHA=1:此時(shí)空閑態(tài)時(shí),SCLK處于低電平,數(shù)據(jù)發(fā)送是在第1個(gè)邊沿,也就是SCLK由低電平到高電平的跳變,所以數(shù)據(jù)采樣是在下降沿,數(shù)據(jù)發(fā)送是在上升沿。
CPOL=1,CPHA=0:此時(shí)空閑態(tài)時(shí),SCLK處于高電平,數(shù)據(jù)采集是在第1個(gè)邊沿,也就是SCLK由高電平到低電平的跳變,所以數(shù)據(jù)采集是在下降沿,數(shù)據(jù)發(fā)送是在上升沿。
CPOL=1,CPHA=1:此時(shí)空閑態(tài)時(shí),SCLK處于高電平,數(shù)據(jù)發(fā)送是在第1個(gè)邊沿,也就是SCLK由高電平到低電平的跳變,所以數(shù)據(jù)采集是在上升沿,數(shù)據(jù)發(fā)送是在下降沿。
硬件簡(jiǎn)介
FLASH閃存 的英文名稱是“Flash Memory”,一般簡(jiǎn)稱為“Flash”,它屬于內(nèi)存器件的一種,是一種非易失性( Non-Volatile )內(nèi)存。
在開發(fā)板上有一塊flash(M25P16),用來保存FPGA的硬件配置信息,也可以用來存儲(chǔ)用戶的應(yīng)用程序或數(shù)據(jù)。
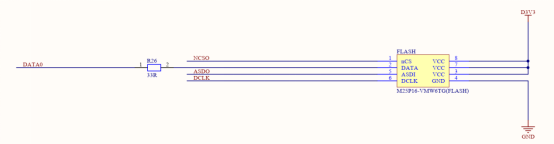
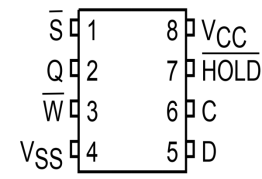
M25P16是一款帶有寫保護(hù)機(jī)制和高速SPI總線訪問的2M字節(jié)串行Flash存儲(chǔ)器,該存儲(chǔ)器主要特點(diǎn):2M字節(jié)的存儲(chǔ)空間,分32個(gè)扇區(qū),每個(gè)扇區(qū)256頁,每頁256字節(jié);能單個(gè)扇區(qū)擦除和整片擦除;每扇區(qū)擦寫次數(shù)保證10萬次、數(shù)據(jù)保存期限至少20年。
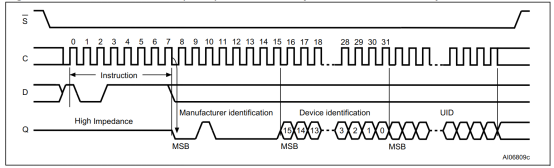
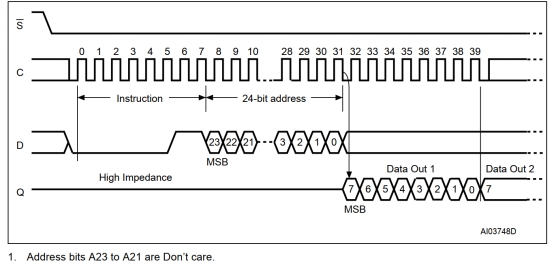
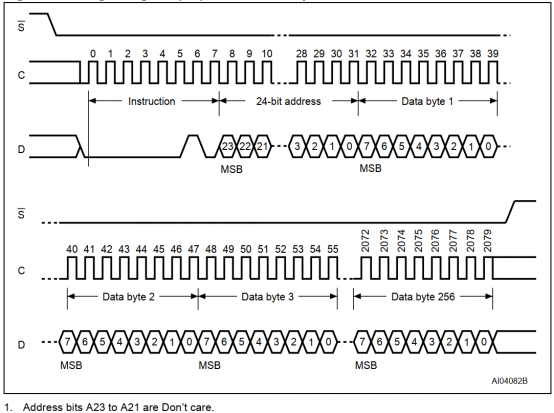
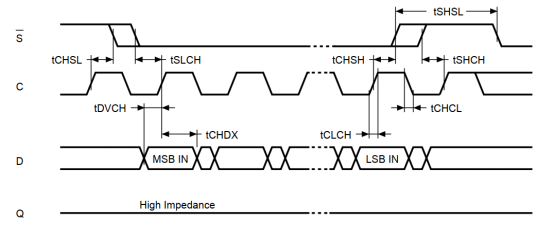
C(serial clock:串行時(shí)鐘)為D和Q提供了數(shù)據(jù)輸入或者輸出的時(shí)序。D的數(shù)據(jù)總是在C的上升沿被采樣。Q的數(shù)據(jù) 在C的下降沿被輸出。
 (Chip Select:芯片選擇端),當(dāng)輸入為低時(shí),該芯片被選中,可以允許進(jìn)行讀寫操作。當(dāng)輸入為高時(shí),該芯片被釋放,不能夠進(jìn)行操作。
(Chip Select:芯片選擇端),當(dāng)輸入為低時(shí),該芯片被選中,可以允許進(jìn)行讀寫操作。當(dāng)輸入為高時(shí),該芯片被釋放,不能夠進(jìn)行操作。
對(duì)于H——o——l——d——和W——, 為保持功能和硬件寫保護(hù)功能,在本設(shè)計(jì)中不使用此管腳,在硬件設(shè)計(jì)時(shí),這兩個(gè)管腳全部被拉高了,即全部失效。
flash采用spi的通信協(xié)議,flash當(dāng)做從機(jī)。serial clcok等效于spi中的sclk,chip select等效于spi中的cs,D等效于spi中的mosi,Q等效于spi中的miso。
flash可以支持mode0和mode3,這兩種模式中,都是在時(shí)鐘的上升沿采樣,在時(shí)鐘的下降沿發(fā)送數(shù)據(jù)。
flash的每一頁都可以被寫入,但是寫入只能是把1改變?yōu)?。擦除可以把0改變?yōu)?。所以在正常寫入數(shù)據(jù)之前,都要將flash進(jìn)行擦除。
flash的命令表如下:
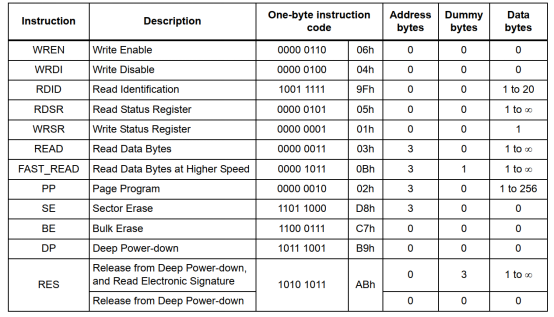
下面介紹幾個(gè)常用的命令。
RDID(Read Identification :讀ID):發(fā)送命令RDID(9F),然后接收第1個(gè)字節(jié)的memory type(20H),第二個(gè)字節(jié)的memory capacity(15H)。后續(xù)的字節(jié)暫不關(guān)心。
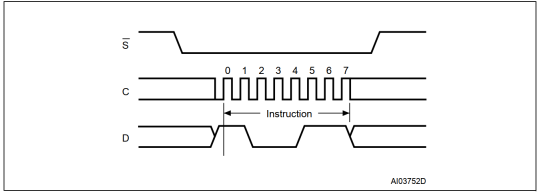
WREN(Write Enable :寫使能):在任何寫或者擦除的命令之前,都必須首先打開寫使能。打開寫使能為發(fā)送命令WREN(06h)。
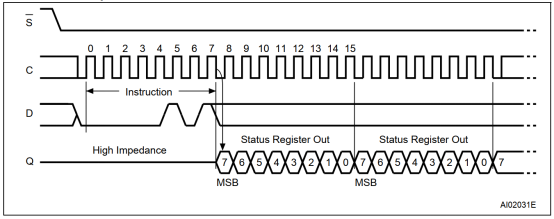
RDSR(Read Status Register:讀狀態(tài)寄存器):發(fā)送命令RDSR(05h),然后返回一個(gè)字節(jié)的狀態(tài)值。
狀態(tài)寄存器的格式如下:
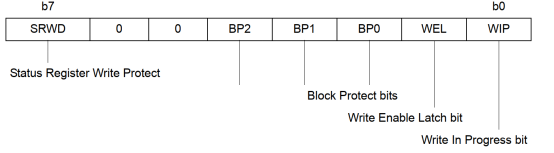
WIP(Write In Progress bit)表示flash內(nèi)部是否正在進(jìn)行內(nèi)部操作,寫和擦除都會(huì)導(dǎo)致flash內(nèi)部進(jìn)行一段時(shí)間的工作,在內(nèi)部工作期間,外部的命令會(huì)被忽略,所以在進(jìn)行任何命令之前,都需要查看flash內(nèi)部是否正在工作。WIP為1時(shí),表示flash內(nèi)部正在工作;WIP為0時(shí),表示flash內(nèi)部沒有在工作。
READ(Read DATA Bytes:讀數(shù)據(jù)):發(fā)送命令READ(03H),后續(xù)發(fā)送3個(gè)字節(jié)的地址,然后就可以接收數(shù)據(jù),內(nèi)部的地址會(huì)不斷遞增。一個(gè)讀命令就可以把整個(gè)flash全部讀完。
PP(Page Program :頁編寫):發(fā)送命令PP(02H),接著發(fā)送3個(gè)字節(jié)的地址,然后發(fā)送數(shù)據(jù)即可。切記所寫的數(shù)據(jù)不能超過本頁的地址范圍。
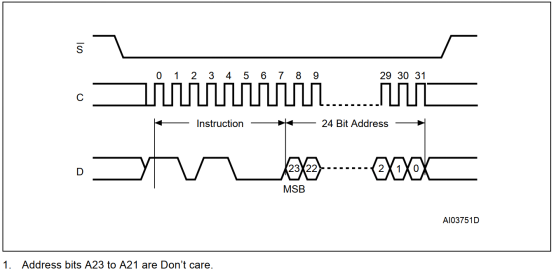
SE(Sector Erase :扇區(qū)擦除):發(fā)送命令SE(D8H),接著發(fā)送3個(gè)字節(jié)的地址。
BE(Bulk Erase:整片擦除):發(fā)送命令BE(C7H)。
關(guān)于flash的其他的介紹,可以參考03_芯片手冊(cè)-》FLASH-》M25P16.pdf。
設(shè)計(jì)要求
設(shè)計(jì)flash(M25P16)控制器。
設(shè)計(jì)分析
根據(jù)M25P16的數(shù)據(jù)手冊(cè)得知,其接口為spi接口,且支持模式0和模式3,本設(shè)計(jì)中選擇模式0。
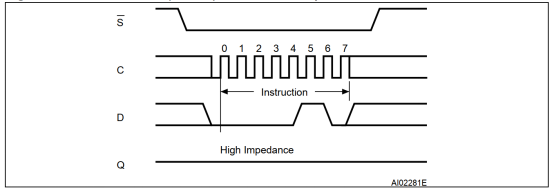
輸入時(shí)序圖如下:
輸出時(shí)序如下:
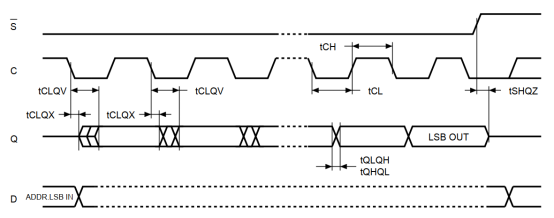
時(shí)序圖中所對(duì)應(yīng)的符號(hào)說明:
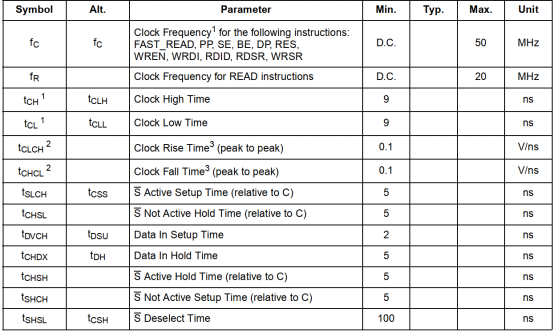
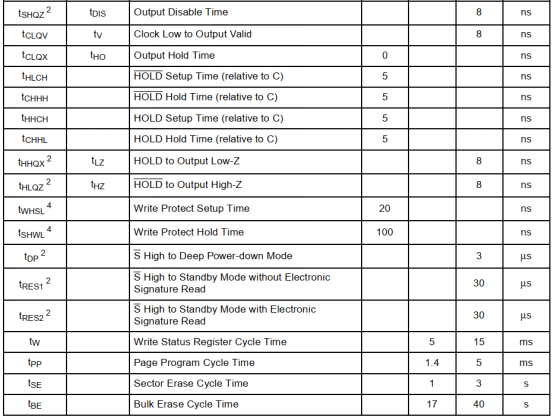
根據(jù)輸入和輸出的時(shí)序圖以及參數(shù)表,將SPI的時(shí)鐘的頻率定為10MHz。
在設(shè)計(jì)中,F(xiàn)PGA作為主機(jī),M25P16作為從機(jī)。
架構(gòu)設(shè)計(jì)和信號(hào)說明
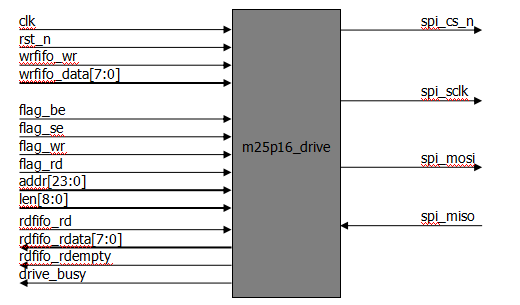
此模塊命名為m25p16_drive。
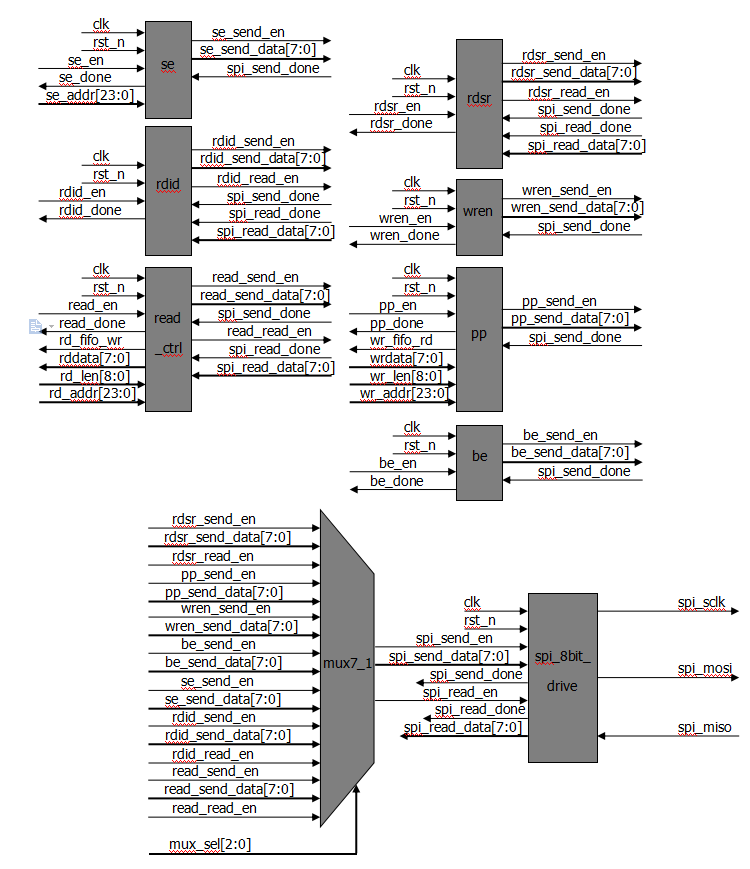
二級(jí)模塊(分模塊)(第一頁)
二級(jí)模塊(分模塊)(第二頁)
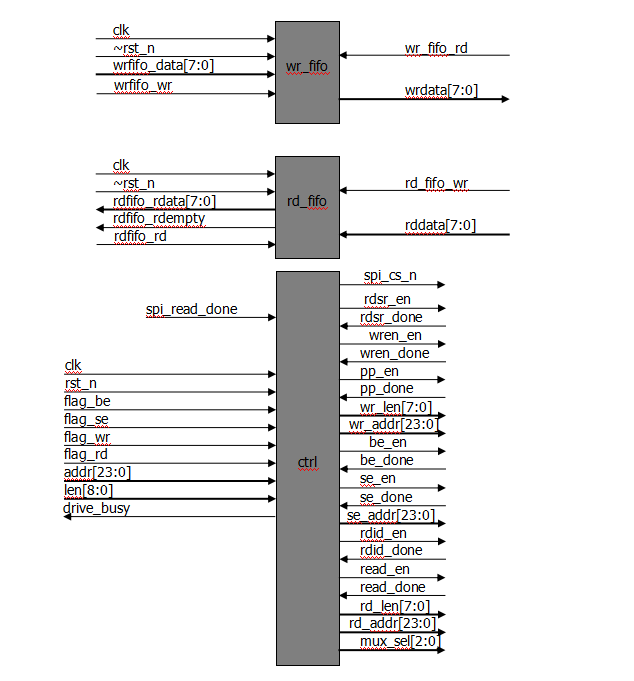
設(shè)計(jì)中,各個(gè)命令單獨(dú)寫出控制器,通過多路選擇器選擇出對(duì)應(yīng)的命令,然后控制spi_8bit_drive將數(shù)據(jù)按照spi的協(xié)議發(fā)送出去。各個(gè)命令的脈沖通過ctrl模塊進(jìn)行控制各個(gè)命令控制器,寫入的數(shù)據(jù)首先寫入到寫緩沖區(qū),讀出的數(shù)據(jù)讀出后寫入到讀緩沖區(qū)。
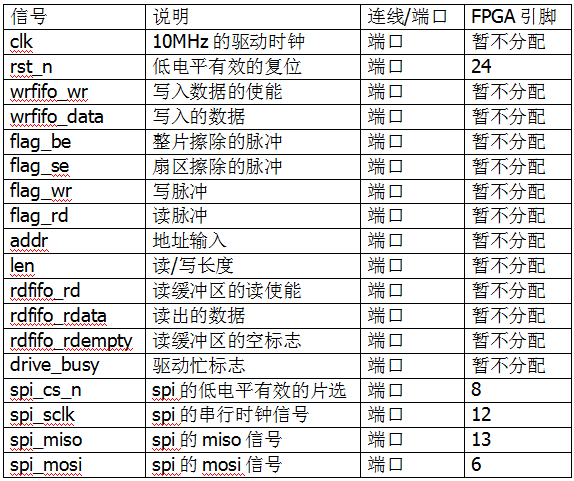
暫不分配的端口,在應(yīng)用時(shí)都是由上游模塊進(jìn)行控制,本設(shè)計(jì)測(cè)試時(shí),編寫上游模塊進(jìn)行測(cè)試。
各個(gè)模塊的功能,和連接線的功能在各個(gè)模塊設(shè)計(jì)中說明。
spi_8bit_drive設(shè)計(jì)實(shí)現(xiàn)
本模塊負(fù)責(zé)將8bit的并行數(shù)據(jù)按照spi協(xié)議發(fā)送出去,以及負(fù)責(zé)按照spi協(xié)議接收數(shù)據(jù),將接收的數(shù)據(jù)(8bit)并行傳輸給各個(gè)模塊。
spi_send_en為發(fā)送數(shù)據(jù)使能信號(hào)(脈沖信號(hào)),spi_send_data為所要發(fā)送數(shù)據(jù),spi_send_done為發(fā)送完成信號(hào)(脈沖信號(hào))。
spi_read_en為接收數(shù)據(jù)使能信號(hào)(脈沖信號(hào)),spi_read_data為所接收的數(shù)據(jù),spi_read_done為接收完成信號(hào)(脈沖信號(hào))。
在發(fā)送邏輯控制中,全部的信號(hào)采用下降沿驅(qū)動(dòng)。利用外部給予的spi_send_en作為啟動(dòng)信號(hào),啟動(dòng)send_cnt。send_cnt在不發(fā)送數(shù)據(jù)時(shí)為8,發(fā)送數(shù)據(jù)時(shí),從0到7。
在接收邏輯中,全部的信號(hào)采用上升沿驅(qū)動(dòng)。利用外部給予的spi_read_en作為啟動(dòng)信號(hào),啟動(dòng)rec_en,經(jīng)過移位接收數(shù)據(jù)。
在spi_sclk輸出時(shí),采用組合邏輯。由于設(shè)計(jì)采用spi的模式0,故而spi_sclk不發(fā)送或者接收數(shù)據(jù)時(shí)為0,接收數(shù)據(jù)時(shí)為時(shí)鐘信號(hào)。因?yàn)橐鬄槟J?,所以在接收數(shù)據(jù)時(shí),spi_sclk的輸出不能夠先有下降沿,即要求spi_sclk的控制信號(hào)不能由上升沿信號(hào)驅(qū)動(dòng),所以將rec_en同步到下降沿的rec_en_n。
仿真代碼為:
`timescale 1ns/1ps
module spi_8bit_drive_tb;
reg clk; reg rst_n; reg spi_send_en; reg [7:0] spi_send_data; wire spi_send_done; reg spi_read_en; wire [7:0] spi_read_data; wire spi_read_done; wire spi_sclk; wire spi_mosi; reg spi_miso;
spi_8bit_drive spi_8bit_drive_inst(
.clk (clk), .rst_n (rst_n), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_send_done (spi_send_done), .spi_read_en (spi_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); initial clk = 1‘b0; always # 50 clk = ~clk; initial begin rst_n = 1’b0; spi_send_en = 1‘b0; spi_send_data = 8’d0; spi_read_en = 1‘b0; spi_miso = 1’b0; # 201 rst_n = 1‘b1; # 200 @ (posedge clk); # 2; spi_send_en = 1’b1; spi_send_data = {$random} % 256; @ (posedge clk); # 2; spi_send_en = 1‘b0; spi_send_data = 8’d0; @ (posedge spi_send_done); # 2000 @ (posedge clk); # 2; spi_read_en = 1‘b1; @ (posedge clk); # 2; spi_read_en = 1’b0; @ (posedge spi_read_done); # 200 $stop; end always @ (negedge clk) spi_miso 《= {$random} % 2;
endmodule
在仿真中,將時(shí)鐘設(shè)置為10MHz。
所有的信號(hào)采用上升沿驅(qū)動(dòng)。發(fā)送一個(gè)8bit的隨機(jī)數(shù)值,接收一個(gè)8bit的隨機(jī)數(shù)值。
spi_miso信號(hào)為從機(jī)下降沿驅(qū)動(dòng)信號(hào)。
通過RTL仿真,可以看出發(fā)送和接收全部正常。
mux7_1設(shè)計(jì)實(shí)現(xiàn)
本模塊負(fù)責(zé)將7個(gè)命令模塊發(fā)出的命令(寫使能、寫數(shù)據(jù)和讀使能)經(jīng)過選擇發(fā)送給spi_8bit_drive模塊。
module mux7_1 (
input wire rdsr_send_en, input wire [7:0] rdsr_send_data, input wire rdsr_read_en, input wire pp_send_en, input wire [7:0] pp_send_data, input wire wren_send_en, input wire [7:0] wren_send_data, input wire be_send_en, input wire [7:0] be_send_data, input wire se_send_en, input wire [7:0] se_send_data, input wire rdid_send_en, input wire [7:0] rdid_send_data, input wire rdid_read_en, input wire read_send_en, input wire [7:0] read_send_data, input wire read_read_en, input wire [2:0] mux_sel, output reg spi_send_en, output reg [7:0] spi_send_data, output reg spi_read_en);
always @ * begin case (mux_sel) 3‘d0 : begin spi_send_en = rdsr_send_en; spi_send_data = rdsr_send_data; spi_read_en = rdsr_read_en; end 3’d1 : begin spi_send_en = pp_send_en; spi_send_data = pp_send_data; spi_read_en = 1‘b0; end 3’d2 : begin spi_send_en = wren_send_en; spi_send_data = wren_send_data; spi_read_en = 1‘b0; end 3’d3 : begin spi_send_en = be_send_en; spi_send_data = be_send_data; spi_read_en = 1‘b0; end 3’d4 : begin spi_send_en = se_send_en; spi_send_data = se_send_data; spi_read_en = 1‘b0; end 3’d5 : begin spi_send_en = rdid_send_en; spi_send_data = rdid_send_data; spi_read_en = rdid_read_en; end 3‘d6 : begin spi_send_en = read_send_en; spi_send_data = read_send_data; spi_read_en = read_read_en; end default : begin spi_send_en = 1’b0; spi_send_data = 8‘d0; spi_read_en = 1’b0; end endcase end
endmodule
在設(shè)計(jì)中,有的命令模塊不需要進(jìn)行讀取(pp和se等等),此時(shí)將輸出的讀使能信號(hào)輸出為低電平。
be設(shè)計(jì)實(shí)現(xiàn)
該模塊接收到be_en(整片擦除的脈沖信號(hào))信號(hào)后,發(fā)送對(duì)應(yīng)的使能和數(shù)據(jù),等待發(fā)送完成脈沖。發(fā)送完成后,輸出擦除完成的脈沖。
module be (
input wire clk, input wire rst_n, input wire be_en, output reg be_done, output reg be_send_en, output wire [7:0] be_send_data, input wire spi_send_done);
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) be_send_en 《= 1’b0; else be_send_en 《= be_en; end assign be_send_data = 8‘hc7;
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) be_done 《= 1‘b0; else be_done 《= spi_send_done; end endmodule
整片擦除的命令為8’hc7。
wren設(shè)計(jì)實(shí)現(xiàn)
該模塊接收到wren_en(打開flash內(nèi)部的寫使能的脈沖信號(hào))信號(hào)后,發(fā)送對(duì)應(yīng)的使能和數(shù)據(jù),等待發(fā)送完成脈沖。發(fā)送完成后,輸出擦除完成的脈沖。
module wren (
input wire clk, input wire rst_n, input wire wren_en, output reg wren_done, output reg wren_send_en, output wire [7:0] wren_send_data, input wire spi_send_done);
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) wren_send_en 《= 1‘b0; else wren_send_en 《= wren_en; end assign wren_send_data = 8’h06;
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) wren_done 《= 1’b0; else wren_done 《= spi_send_done; end endmodule
打開flash內(nèi)部寫使能的命令碼為8’h06。
se設(shè)計(jì)實(shí)現(xiàn)
該模塊接收到se_en(擦除扇區(qū)的寫使能的脈沖信號(hào))信號(hào)后,發(fā)送對(duì)應(yīng)的使能和數(shù)據(jù),等待發(fā)送完成脈沖。發(fā)送完成后,接著發(fā)送高八位地址,中間八位地址和低八位地址。全部發(fā)送完成后,發(fā)送se_done信號(hào)。
該模塊采用狀態(tài)機(jī)實(shí)現(xiàn)。SE_STATE(扇區(qū)擦除命令發(fā)送)、H_ADDR(高八位地址發(fā)送)、M_ADDR(中間八位地址發(fā)送)、L_ADDR(低八位地址發(fā)送)、SE_DONE(扇區(qū)擦除完成)。所有的脈沖信號(hào)在未標(biāo)注的時(shí)刻,輸出全部為0。
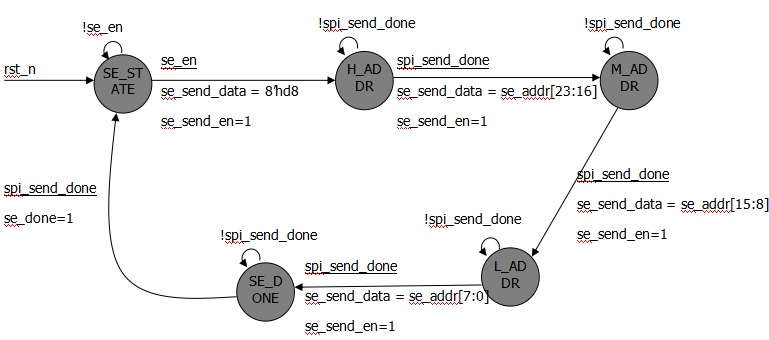
在發(fā)送過程中,由于是每8bit發(fā)送一次,所以在時(shí)序上將看到發(fā)送時(shí),每8個(gè)脈沖一組,中間會(huì)有明顯的間隔。
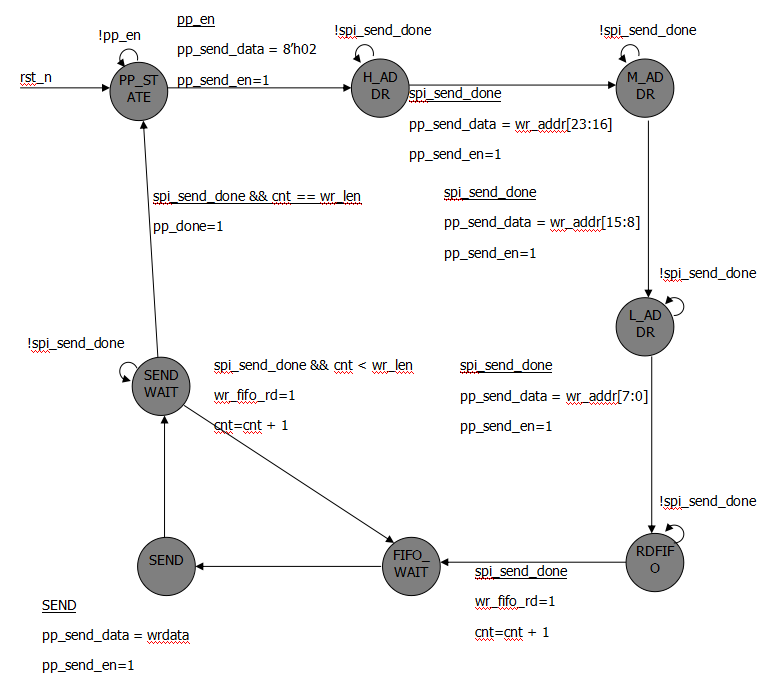
pp設(shè)計(jì)實(shí)現(xiàn)
該模塊負(fù)責(zé)將外部寫fifo中的數(shù)據(jù)寫入到flash中。wr_fifo_rd為寫fifo的讀使能信號(hào),wrdata為從寫fifo中讀出的數(shù)據(jù),wr_len為需要寫入flash中數(shù)據(jù)的長(zhǎng)度,wr_addr為寫入地址。
該模塊采用狀態(tài)機(jī)實(shí)現(xiàn)。PP_STATE(發(fā)送pp命令),H_ADDR(發(fā)送高八位地址)、M_ADDR(發(fā)送中間八位地址),L_ADDR(發(fā)送低八位地址)、RDFIFO(讀寫fifo)、FIFO_WAIT(等待讀寫fifo的數(shù)據(jù)輸出)、SEND(發(fā)送8bit數(shù)據(jù))、SEND_WAIT(發(fā)送等待,發(fā)送完成后判斷是否發(fā)送完成)。對(duì)于所有的脈沖信號(hào),沒有賦值的位置,全部賦值為0。
cnt為記錄已經(jīng)發(fā)送的數(shù)據(jù)個(gè)數(shù)。
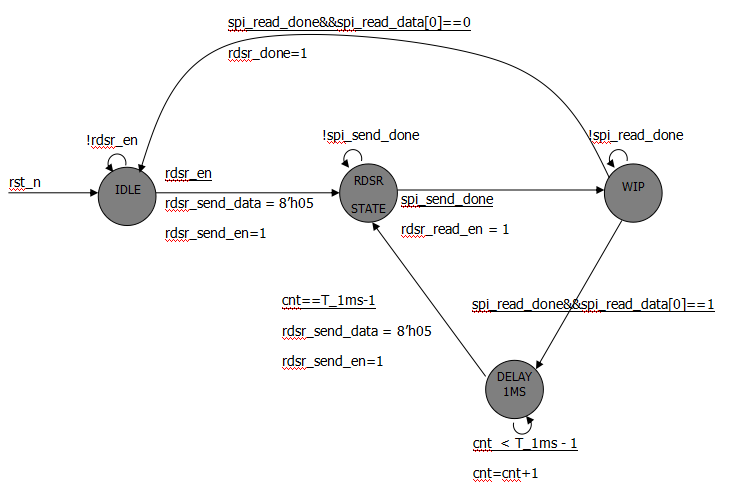
rdsr設(shè)計(jì)實(shí)現(xiàn)
本模塊的功能為讀取m25p16的狀態(tài)寄存器,主要檢測(cè)狀態(tài)寄存器的最低位(WIP)。
WIP(write in progress :正在進(jìn)行寫進(jìn)程),該bie位表示了flash內(nèi)部是否在進(jìn)行寫進(jìn)程。如果處于寫進(jìn)程時(shí),flash忽略外部所有的命令,所以建議在執(zhí)行任何命令前,首先進(jìn)行檢測(cè)該位。1表示正在寫進(jìn)程中,0表示不處于寫進(jìn)程。
如果檢測(cè)到正在寫進(jìn)程中,進(jìn)行延遲1ms,然后再次讀取該位狀態(tài)。直到寫進(jìn)程結(jié)束。
本模塊采用狀態(tài)機(jī)設(shè)計(jì)實(shí)現(xiàn)。ILDE(發(fā)送讀狀態(tài)寄存器命令)、RDSRSTATE(發(fā)送讀使能)、WIP(判斷wip位)、 DELAY1ms(延遲1ms)。cnt為延遲1ms的計(jì)數(shù)器。
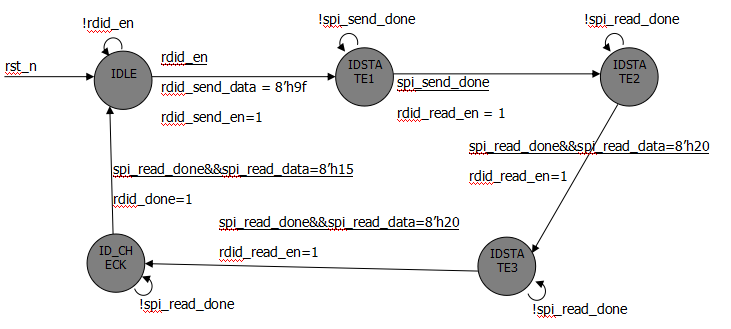
rdid設(shè)計(jì)實(shí)現(xiàn)
該模塊負(fù)責(zé)讀取flash的ID(2015),驗(yàn)證ID的正確性。
該模塊采用狀態(tài)機(jī)的方式實(shí)現(xiàn)。IDLE(等待讀取ID的命令)、IDSTATE1(讀取高八位ID)、IDSTATE2(讀取中間八位ID)、IDSTATE3(讀取低八位ID)、ID_CHECK(檢測(cè)ID的正確性)。
狀態(tài)轉(zhuǎn)移圖如下:
設(shè)計(jì)代碼為:
module rdid (
input wire clk, input wire rst_n, input wire rdid_en, output reg rdid_done, output reg rdid_send_en, output reg [7:0] rdid_send_data, input wire spi_send_done, output reg rdid_read_en, input wire spi_read_done, input wire [7:0] spi_read_data);
localparam IDLE = 5’b00001; localparam IDSTATE1 = 5‘b00010; localparam IDSTATE2 = 5’b00100; localparam IDSTATE3 = 5‘b01000; localparam ID_CHECK = 5’b10000; reg [4:0] c_state; reg [4:0] n_state; always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) c_state 《= IDLE; else c_state 《= n_state; end always @ * begin case (c_state) IDLE : begin if (rdid_en == 1’b1) n_state = IDSTATE1; else n_state = IDLE; end IDSTATE1 : begin if (spi_send_done == 1‘b1) n_state = IDSTATE2; else n_state = IDSTATE1; end IDSTATE2 : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h20) n_state = IDSTATE3; else n_state = IDSTATE2; end IDSTATE3 : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h20) n_state = ID_CHECK; else n_state = IDSTATE3; end ID_CHECK : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h15) n_state = IDLE; else n_state = ID_CHECK; end default : n_state = IDLE; endcase end
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) rdid_send_data 《= 8‘d0; else if (c_state == IDLE && rdid_en == 1’b1) rdid_send_data 《= 8‘h9f; else rdid_send_data 《= 8’d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdid_send_en 《= 1’b0; else if (c_state == IDLE && rdid_en == 1‘b1) rdid_send_en 《= 1’b1; else rdid_send_en 《= 1‘b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) rdid_read_en 《= 1‘b0; else if ((c_state == IDSTATE1 && spi_send_done == 1’b1) || (c_state == IDSTATE2 && spi_read_done == 1‘b1 && spi_read_data == 8’h20) || (c_state == IDSTATE3 && spi_read_done == 1‘b1 && spi_read_data == 8’h20)) rdid_read_en 《= 1‘b1; else rdid_read_en 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdid_done 《= 1’b0; else if (c_state == ID_CHECK && spi_read_done == 1‘b1 && spi_read_data == 8’h15) rdid_done 《= 1‘b1; else rdid_done 《= 1’b0; end endmodule
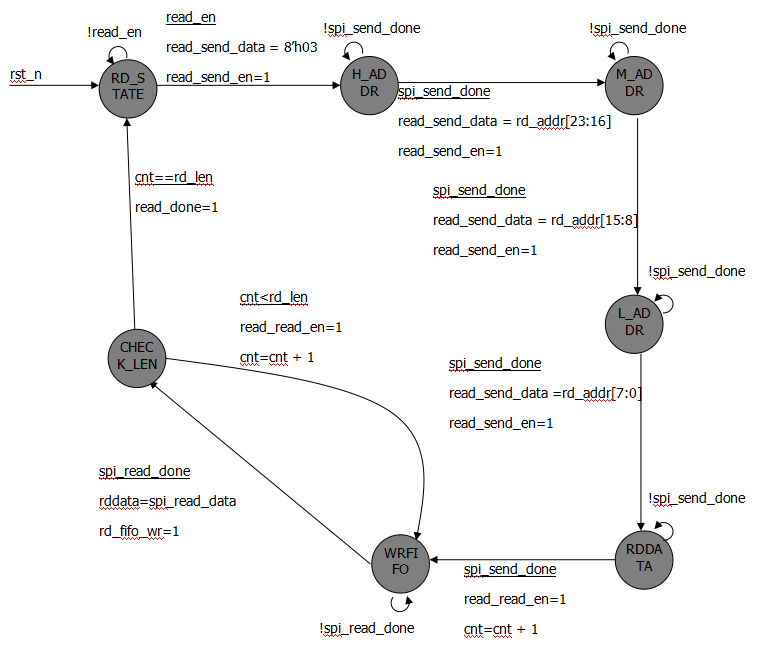
read_ctrl設(shè)計(jì)實(shí)現(xiàn)
該模塊負(fù)責(zé)將flash的數(shù)據(jù)讀出,寫入到輸出緩存中。
該模塊采用狀態(tài)機(jī)實(shí)現(xiàn)。RD_STATE(等待讀命令)、H_ADDR(發(fā)送高八位地址)、M_ADDR(發(fā)送中間八位地址)、L_ADDR(發(fā)送低八位地址)、RDDATA(讀取數(shù)據(jù))、WRFIFO(將讀出的數(shù)據(jù)寫入到FIFO中)、CHECK_LEN(判斷讀取的長(zhǎng)度)。
狀態(tài)轉(zhuǎn)移圖如下:
wr_fifo和rd_fifo調(diào)用
兩個(gè)fifo的寬度設(shè)置為8,深度設(shè)置為256,同步fifo,帶有復(fù)位。
ctrl設(shè)計(jì)實(shí)現(xiàn)
該模塊根據(jù)外部的命令,按照m25p16的執(zhí)行規(guī)則,進(jìn)行控制各個(gè)模塊的執(zhí)行。
該模塊采用狀態(tài)機(jī)實(shí)現(xiàn)。INIT_RDSR(讀WIP),INIT_RDID(讀ID),INIT_ID(判斷ID),WIP(讀WIP),WIP_DONE(等待WIP),IDLE(空閑狀態(tài)),**STATE(執(zhí)行對(duì)應(yīng)的命令),**WREN(打開flash的寫使能)。在進(jìn)行任何命令前,都檢查wip。
狀態(tài)轉(zhuǎn)移圖如下:
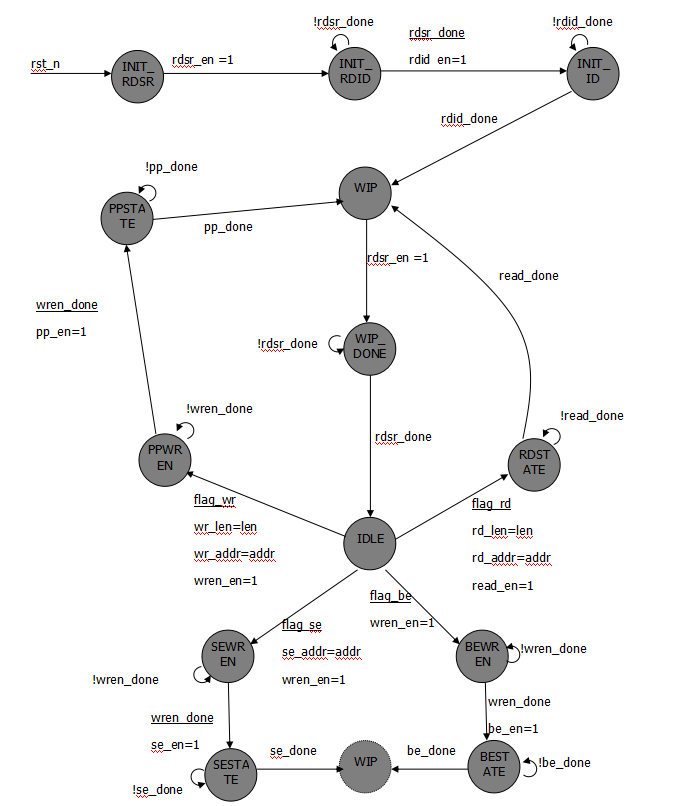
在不同的狀態(tài),mux_sel選擇對(duì)應(yīng)的命令通過。
drive_busy只有在IDLE狀態(tài)才是低電平。
spi_cs_n信號(hào), DLE狀態(tài)為高電平、WIP_DONE(INIT_RDID)中spi_read_done信號(hào)為高時(shí) (保證能夠多次讀取狀態(tài)寄存器)、在其他狀態(tài)發(fā)生切換時(shí),spi_cs_n 為高電平,否則為低電平。
m25p16_drive設(shè)計(jì)實(shí)現(xiàn)
本模塊負(fù)責(zé)連接所有二級(jí)模塊,實(shí)現(xiàn)所有的功能。
module m25p16_drive (
input wire clk, input wire rst_n, input wire wrfifo_wr, input wire [7:0] wrfifo_data, input wire flag_be, input wire flag_se, input wire flag_wr, input wire flag_rd, input wire [23:0] addr, input wire [8:0] len, input wire rdfifo_rd, output wire [7:0] rdfifo_rdata, output wire rdfifo_rdempty, output wire drive_busy, output wire spi_cs_n, output wire spi_sclk, output wire spi_mosi, input wire spi_miso);
wire spi_send_en; wire [7:0] spi_send_data; wire spi_send_done; wire spi_read_en; wire [7:0] spi_read_data; wire spi_read_done; wire rdsr_send_en; wire [7:0] rdsr_send_data; wire rdsr_read_en; wire pp_send_en; wire [7:0] pp_send_data; wire wren_send_en; wire [7:0] wren_send_data; wire be_send_en; wire [7:0] be_send_data; wire se_send_en; wire [7:0] se_send_data; wire rdid_send_en; wire [7:0] rdid_send_data; wire rdid_read_en; wire read_send_en; wire [7:0] read_send_data; wire read_read_en; wire [2:0] mux_sel; wire be_en; wire be_done; wire wren_en; wire wren_done; wire se_en; wire [23:0] se_addr; wire se_done; wire pp_en; wire pp_done; wire wr_fifo_rd; wire [7:0] wrdata; wire [8:0] wr_len; wire [23:0] wr_addr; wire rdsr_en; wire rdsr_done; wire rdid_en; wire rdid_done; wire read_en; wire [23:0] rd_addr; wire [8:0] rd_len; wire [7:0] rddata; wire rd_fifo_wr; wire read_done; ctrl ctrl_inst(
.clk (clk), .rst_n (rst_n), .flag_be (flag_be), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .addr (addr), .len (len), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_read_done (spi_read_done), .rdsr_en (rdsr_en), .rdsr_done (rdsr_done), .wren_en (wren_en), .wren_done (wren_done), .pp_en (pp_en), .wr_addr (wr_addr), .wr_len (wr_len), .pp_done (pp_done), .be_en (be_en), .be_done (be_done), .se_en (se_en), .se_addr (se_addr), .se_done (se_done), .rdid_en (rdid_en), .rdid_done (rdid_done), .read_en (read_en), .rd_addr (rd_addr), .rd_len (rd_len), .read_done (read_done), .mux_sel (mux_sel) ); rd_fifo rd_fifo_inst ( .aclr ( ~rst_n ), .clock ( clk ), .data ( rddata ), .rdreq ( rdfifo_rd ), .wrreq ( rd_fifo_wr ), .empty ( rdfifo_rdempty ), .q ( rdfifo_rdata ) ); wr_fifo wr_fifo_inst ( .aclr ( ~rst_n ), .clock ( clk ), .data ( wrfifo_data ), .rdreq ( wr_fifo_rd ), .wrreq ( wrfifo_wr ), .q ( wrdata ) ); read_ctrl read_ctrl_inst(
.clk (clk), .rst_n (rst_n), .read_en (read_en), .rd_addr (rd_addr), .rd_len (rd_len), .rddata (rddata), .rd_fifo_wr (rd_fifo_wr), .read_done (read_done), .read_send_en (read_send_en), .read_send_data (read_send_data), .spi_send_done (spi_send_done), .read_read_en (read_read_en), .spi_read_done (spi_read_done), .spi_read_data (spi_read_data) );
rdid rdid_inst(
.clk (clk), .rst_n (rst_n), .rdid_en (rdid_en), .rdid_done (rdid_done), .rdid_send_en (rdid_send_en), .rdid_send_data (rdid_send_data), .spi_send_done (spi_send_done), .rdid_read_en (rdid_read_en), .spi_read_done (spi_read_done), .spi_read_data (spi_read_data) ); rdsr rdsr_inst(
.clk (clk), .rst_n (rst_n), .rdsr_en (rdsr_en), .rdsr_done (rdsr_done), .rdsr_send_en (rdsr_send_en), .rdsr_send_data (rdsr_send_data), .spi_send_done (spi_send_done), .rdsr_read_en (rdsr_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done) ); pp pp_inst(
.clk (clk), .rst_n (rst_n), .pp_en (pp_en), .pp_done (pp_done), .wr_fifo_rd (wr_fifo_rd), .wrdata (wrdata), .wr_len (wr_len), .wr_addr (wr_addr), .pp_send_en (pp_send_en), .pp_send_data (pp_send_data), .spi_send_done (spi_send_done) ); se se_inst(
.clk (clk), .rst_n (rst_n), .se_en (se_en), .se_addr (se_addr), .se_done (se_done), .se_send_en (se_send_en), .se_send_data (se_send_data), .spi_send_done (spi_send_done) ); wren wren_inst(
.clk (clk), .rst_n (rst_n), .wren_en (wren_en), .wren_done (wren_done), .wren_send_en (wren_send_en), .wren_send_data (wren_send_data), .spi_send_done (spi_send_done) );
be be_inst(
.clk (clk), .rst_n (rst_n), .be_en (be_en), .be_done (be_done), .be_send_en (be_send_en), .be_send_data (be_send_data), .spi_send_done (spi_send_done) ); mux7_1 mux7_1_inst(
.rdsr_send_en (rdsr_send_en), .rdsr_send_data (rdsr_send_data), .rdsr_read_en (rdsr_read_en), .pp_send_en (pp_send_en), .pp_send_data (pp_send_data), .wren_send_en (wren_send_en), .wren_send_data (wren_send_data), .be_send_en (be_send_en), .be_send_data (be_send_data), .se_send_en (se_send_en), .se_send_data (se_send_data), .rdid_send_en (rdid_send_en), .rdid_send_data (rdid_send_data), .rdid_read_en (rdid_read_en), .read_send_en (read_send_en), .read_send_data (read_send_data), .read_read_en (read_read_en), .mux_sel (mux_sel), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_read_en (spi_read_en) ); spi_8bit_drive spi_8bit_drive_inst(
.clk (clk), .rst_n (rst_n), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_send_done (spi_send_done), .spi_read_en (spi_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); endmodule
RTL仿真
本次設(shè)計(jì)涉及到讀取flash的id以及狀態(tài)寄存器,所以在仿真時(shí)需要加入仿真模型。仿真模型放在msim的m25p16_sim_module中。m25p16為仿真模型的頂層文件。
由于讀寫和擦除的時(shí)間較長(zhǎng),RTL仿真中,將只仿真RDSR和RDID,其他的功能測(cè)試在板級(jí)測(cè)試時(shí)進(jìn)行。
仿真代碼如下:
`timescale 1ns/1ps
module m25p16_drive_tb;
reg clk; reg rst_n; wire drive_busy; wire spi_cs_n; wire spi_sclk; wire spi_mosi; wire spi_miso;
m25p16_drive m25p16_drive_inst(
.clk (clk), .rst_n (rst_n), .wrfifo_wr (1’b0), .wrfifo_data (8‘d0), .flag_be (1’b0), .flag_se (1‘b0), .flag_wr (1’b0), .flag_rd (1‘b0), .addr (24’d0), .len (9‘d0), .rdfifo_rd (1’b0), .rdfifo_rdata (), .rdfifo_rdempty (), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) );
m25p16 m25p16_inst( .c (spi_sclk), .data_in (spi_mosi), .s (spi_cs_n), .w (1‘b1), .hold (1’b1), .data_out (spi_miso) );
initial clk = 1‘b0; always # 50 clk = ~clk; initial begin rst_n = 1’b0; # 201 rst_n = 1‘b1; @ (negedge drive_busy); # 2000 $stop; end
endmodule
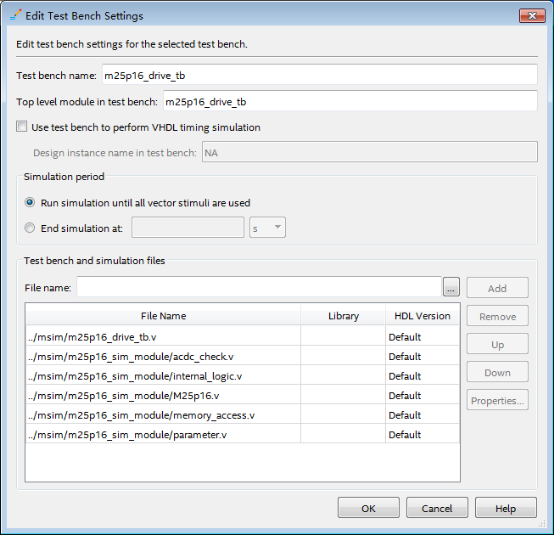
在設(shè)置testbench時(shí),注意將所有文件全部添加到文件中。
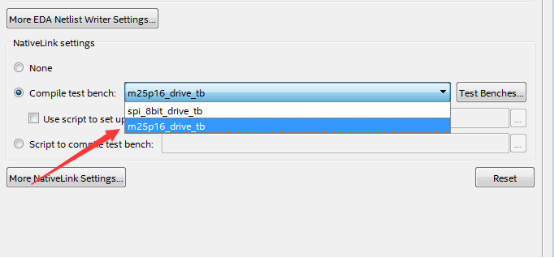
選擇testbench時(shí),注意選中設(shè)置的m25p16_drive_tb。
利用modelsim仿真,可以得出如下RTL仿真波形。
讀到ID,以及檢測(cè)WIP都是正確的。
板級(jí)測(cè)試
由于m25p16的時(shí)序原因,整個(gè)設(shè)計(jì)工作在10MHz(利用PLL產(chǎn)生)。
在進(jìn)行測(cè)試控制時(shí),對(duì)最后一個(gè)扇區(qū)進(jìn)行擦除;對(duì)最后一個(gè)扇區(qū)的第一頁進(jìn)行寫入數(shù)據(jù)100個(gè)(1至100);對(duì)最后一個(gè)扇區(qū)的第一個(gè)進(jìn)行讀取,驗(yàn)證數(shù)據(jù)是否為1至100。
測(cè)試的控制模塊命名為test_ctrl。
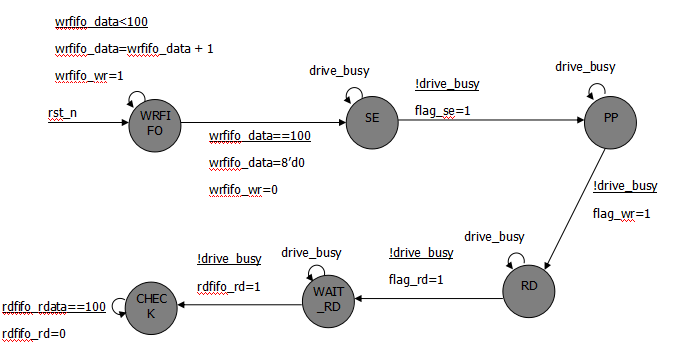
此模塊采用狀態(tài)機(jī)實(shí)現(xiàn)。WRFIFO(將1至100寫入wrfifo中)、SE(扇區(qū)擦除)、PP(寫入flash)、RD(讀出flash)、WAIT_RD(等待讀取)、CHECK( 檢測(cè)讀出的數(shù)據(jù)的正確性)。
設(shè)計(jì)代碼為:
module test_ctrl (
input wire clk, input wire rst_n, output reg wrfifo_wr, output reg [7:0] wrfifo_data, output reg flag_se, output reg flag_wr, output reg flag_rd, input wire drive_busy, output reg rdfifo_rd, input wire [7:0] rdfifo_rdata);
localparam WRFIFO = 6’b000_001; localparam SE = 6‘b000_010; localparam PP = 6’b000_100; localparam RD = 6‘b001_000; localparam WAIT_RD = 6’b010_000; localparam CHECK = 6‘b100_000; reg [5:0] c_state; reg [5:0] n_state; always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) c_state 《= WRFIFO; else c_state 《= n_state; end always @ * begin case (c_state) WRFIFO : begin if (wrfifo_data == 8‘d100) n_state = SE; else n_state = WRFIFO; end SE : begin if (drive_busy == 1’b0) n_state = PP; else n_state = SE; end PP : begin if (drive_busy == 1‘b0) n_state = RD; else n_state = PP; end RD : begin if (drive_busy == 1’b0) n_state = WAIT_RD; else n_state = RD; end WAIT_RD : begin if (drive_busy == 1‘b0) n_state = CHECK; else n_state = WAIT_RD; end
CHECK : begin n_state = CHECK; end
default : n_state = WRFIFO; endcase end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) wrfifo_data 《= 8‘d0; else if (c_state == WRFIFO && wrfifo_data 《 8’d100) wrfifo_data 《= wrfifo_data + 1‘b1; else wrfifo_data 《= 8’d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) wrfifo_wr 《= 1’d0; else if (c_state == WRFIFO && wrfifo_data 《 8‘d100) wrfifo_wr 《= 1’d1; else wrfifo_wr 《= 1‘d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) flag_se 《= 1‘b0; else if (c_state == SE && drive_busy == 1’b0) flag_se 《= 1‘b1; else flag_se 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) flag_wr 《= 1’b0; else if (c_state == PP && drive_busy == 1‘b0) flag_wr 《= 1’b1; else flag_wr 《= 1‘b0; end
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) flag_rd 《= 1‘b0; else if (c_state == RD && drive_busy == 1’b0) flag_rd 《= 1‘b1; else flag_rd 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdfifo_rd 《= 1’b0; else if (c_state == WAIT_RD && drive_busy == 1‘b0) rdfifo_rd 《= 1’b1; else if (c_state == CHECK && rdfifo_rdata == 8‘d99) rdfifo_rd 《= 1’b0; else rdfifo_rd 《= rdfifo_rd; end endmodule
將test模塊設(shè)置為頂層。在test模塊中,m25p16_drive例化中,對(duì)于整片擦除不做控制,對(duì)于addr直接指向最后一個(gè)扇區(qū)的第一頁,len指定為100。
代碼為:
module test (
input wire clk, input wire rst_n, output wire spi_cs_n, output wire spi_sclk, output wire spi_mosi, input wire spi_miso);
wire wrfifo_wr; wire [7:0] wrfifo_data; wire flag_rd; wire flag_se; wire flag_wr; wire drive_busy; wire rdfifo_rd; wire [7:0] rdfifo_rdata; wire clk_10m; wire pll_locked; pll_test pll_test_inst ( .areset ( ~rst_n ), .inclk0 ( clk ), .c0 ( clk_10m ), .locked ( pll_locked ) );
test_ctrl test_ctrl_inst(
.clk (clk_10m), .rst_n (pll_locked), .wrfifo_wr (wrfifo_wr), .wrfifo_data (wrfifo_data), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .drive_busy (drive_busy), .rdfifo_rd (rdfifo_rd), .rdfifo_rdata (rdfifo_rdata) ); m25p16_drive m25p16_drive_inst(
.clk (clk_10m), .rst_n (pll_locked), .wrfifo_wr (wrfifo_wr), .wrfifo_data (wrfifo_data), .flag_be (1‘b0), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .addr (24’hff0000), .len (9‘d100), .rdfifo_rd (rdfifo_rd), .rdfifo_rdata (rdfifo_rdata), .rdfifo_rdempty (), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); endmodule
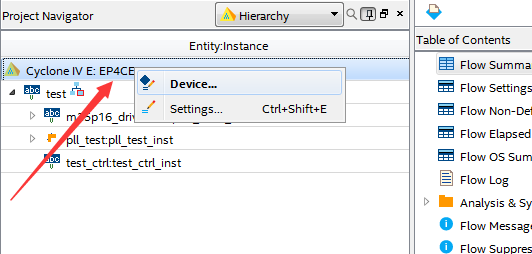
由于開發(fā)板上的flash是為FPGA進(jìn)行保存配置信息的,所以管腳都連接在專用管腳上,本次實(shí)驗(yàn)需要將這專用管腳配置為普通io。
右擊器件型號(hào),選擇device。
點(diǎn)擊device and pin options。
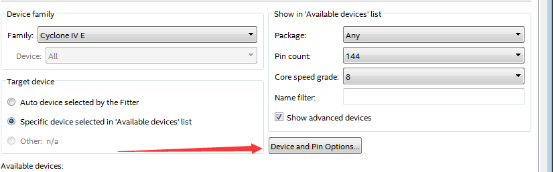
選擇Dual-purpose pins,將其中所有的功能改為普通IO。
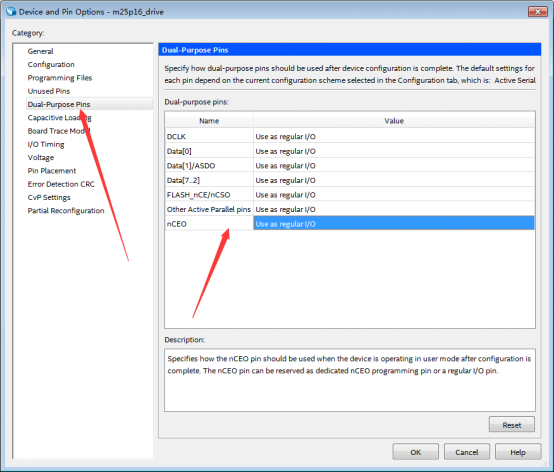
點(diǎn)擊ok后,即可進(jìn)行綜合分析。
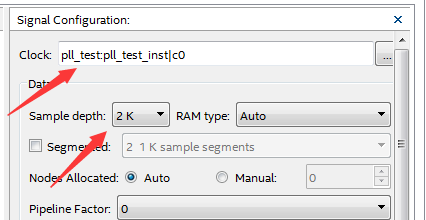
連接開發(fā)板和PC,打開邏輯分析儀。
采樣時(shí)鐘選擇10MHz(PLL 的c0),采樣深度設(shè)置為2K。
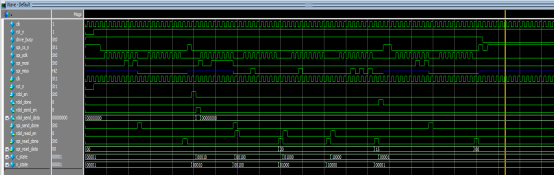
觀測(cè)信號(hào)如下圖所示。
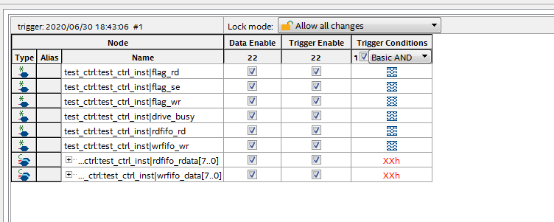
首先將wrfifo_wr的觸發(fā)條件設(shè)置為上升沿。點(diǎn)擊觸發(fā)后,按下復(fù)位按鍵。觸發(fā)后,可以看到寫入數(shù)據(jù)1至100后,然后進(jìn)行SE命令。
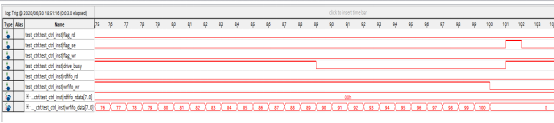
將rdfifo_rd的觸發(fā)條件設(shè)置為上升沿(將wrfifo_wr觸發(fā)條件修改為donot care)。點(diǎn)擊觸發(fā)后,按下復(fù)位按鍵。

通過仿真和下板實(shí)測(cè),驗(yàn)證控制器設(shè)計(jì)正確。
原文標(biāo)題:FPGA零基礎(chǔ)學(xué)習(xí)精選 | SPI 協(xié)議驅(qū)動(dòng)設(shè)計(jì)
文章出處:【微信公眾號(hào):FPGA技術(shù)江湖】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
FPGA
+關(guān)注
關(guān)注
1635文章
21832瀏覽量
608167 -
驅(qū)動(dòng)
+關(guān)注
關(guān)注
12文章
1864瀏覽量
85909 -
SPI
+關(guān)注
關(guān)注
17文章
1730瀏覽量
92781
原文標(biāo)題:FPGA零基礎(chǔ)學(xué)習(xí)精選 | SPI 協(xié)議驅(qū)動(dòng)設(shè)計(jì)
文章出處:【微信號(hào):HXSLH1010101010,微信公眾號(hào):FPGA技術(shù)江湖】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
對(duì)于一款新的BSP如何添加SPI驅(qū)動(dòng)

iic協(xié)議與spi協(xié)議的區(qū)別
迅為RK3568開發(fā)板驅(qū)動(dòng)指南Linux中通用SPI設(shè)備驅(qū)動(dòng)
spi master接口的fpga實(shí)現(xiàn)
采用Xilinx FPGA的AFE79xx SPI啟動(dòng)指南

PCM5142如何在FPGA中通過SPI配置寄存器?
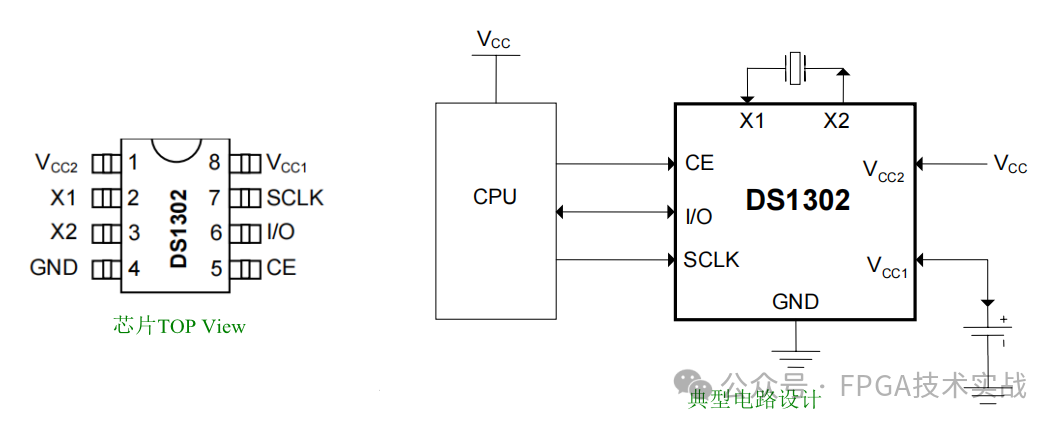
DS1302芯片與FPGA之間SPI通信原理
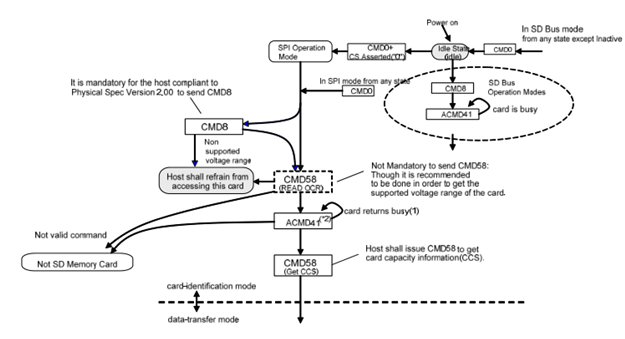
瀚海微SD NAND之SD 協(xié)議(36)SPI模式
SPI通信協(xié)議的基本概念和工作模式
Verilog:【8】基于FPGA實(shí)現(xiàn)SD NAND FLASH的SPI協(xié)議讀寫
FPGA中的單總線協(xié)議設(shè)計(jì)(附示例代碼)

FPGA設(shè)計(jì)中,對(duì)SPI進(jìn)行參數(shù)化結(jié)構(gòu)設(shè)計(jì)
SPI和I2C通信協(xié)議:應(yīng)用與區(qū)別
FPGA設(shè)計(jì)中,對(duì)SPI進(jìn)行參數(shù)化結(jié)構(gòu)設(shè)計(jì)
FPGA設(shè)計(jì)中SPI的參數(shù)化結(jié)構(gòu)設(shè)計(jì)方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論