

0 引言
航空攝影(Aerial Photography)又稱航拍,是指在飛機(jī)或其他航空飛行器上利用航空攝影機(jī)攝取地面景物相片的技術(shù)。目前,航空攝影應(yīng)用廣泛,是獲取地理信息的主要手段[1-2]。在航空攝影中,存在著一個難題需要解決:飛機(jī)在飛行攝影時會受到本機(jī)和氣流等的影響,從而產(chǎn)生機(jī)體振動,相機(jī)的姿態(tài)角也會隨著改變,相機(jī)姿態(tài)時刻改變就會給高精度拍攝帶來困難。所以為提高航拍質(zhì)量,必須對相機(jī)姿態(tài)進(jìn)行校正[3]。
校正的前提是獲取相機(jī)姿態(tài),所以慣性測量元件必不可少,但是單一的慣性測量元件無法給出準(zhǔn)確的姿態(tài)角,需要對多個慣性測量元件的數(shù)據(jù)進(jìn)行數(shù)據(jù)融合。使用比較普遍的慣性測量元件的組合是加速度計和陀螺儀。它們輸出的數(shù)據(jù)各有優(yōu)缺點,可以使用Kalman濾波對其進(jìn)行數(shù)據(jù)融合以得到準(zhǔn)確的姿態(tài)角[4-5]。
現(xiàn)有的實現(xiàn)Kalman濾波的方式主要有兩種:PC機(jī)和DSP,兩者都存在著系統(tǒng)性能和成本不能兼顧的問題。而FPGA卻可以很好地解決這個問題。本文主要講述的便是用FPGA實現(xiàn)Kalman濾波來獲取準(zhǔn)確的相機(jī)姿態(tài)。
1 坐標(biāo)模型
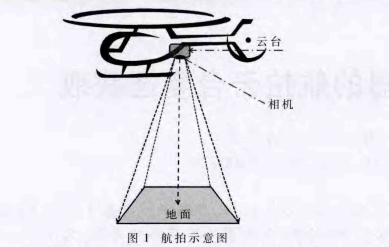
在進(jìn)行航拍作業(yè)時,相機(jī)搭載在云臺上,云臺和飛機(jī)是一體的,當(dāng)相機(jī)拍攝地面照片時,相機(jī)拍攝方向應(yīng)與地面垂直,如圖1所示。
為獲取相機(jī)姿態(tài),首先以相機(jī)為原點,建立坐標(biāo)系,如圖2所示。其中,XY平面與地面平行,Z軸垂直于地面,Y軸方向為飛機(jī)飛行方向。
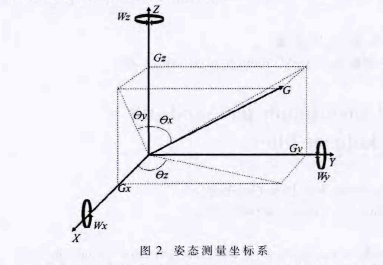
將加速度計固定在相機(jī)上,當(dāng)相機(jī)姿態(tài)發(fā)生改變時,加速度的3個敏感軸便可以輸出在其相應(yīng)方向產(chǎn)生的重力分量信號,如圖2中的Gx,Gy,Gz所示。陀螺儀是一種角速度傳感器,它可以輸出對應(yīng)軸上的瞬時角速度,如圖2中的Wx,Wy,Wz所示。
根據(jù)以上坐標(biāo)系,可以得到姿態(tài)角θx,θy,θz(分別代表著俯仰角、橫滾角、偏航角),如式1所示,其中ΔT為采樣時間,Δθ為采樣時間內(nèi)的姿態(tài)角變化。
可見,由加速度計或者陀螺儀都可以初步得到姿態(tài)角,但是無論是加速度計還是陀螺儀,它們輸出的原始數(shù)據(jù)都存在著固有缺陷:當(dāng)相機(jī)處于變速運動狀態(tài)時,加速度計的輸出并不是重力加速度,而是重力加速度和其自身加速度的矢量和。陀螺儀是通過對角速度積分得到姿態(tài)角,隨著時間的推移,姿態(tài)角的誤差會越來越大。所以單一的加速度計或者陀螺儀都無法獲得正確的姿態(tài)角,必須對兩者進(jìn)行數(shù)據(jù)融合。
2 Kalman濾波模型的建立
Kalman濾波是在時域內(nèi)以信號的一、二階統(tǒng)計特性已知為前提、以均方誤差極小為判據(jù),能自動跟蹤信號統(tǒng)計性質(zhì)的非平穩(wěn)變化,具有遞歸性質(zhì)的一種算法[5]。Kalman濾波的狀態(tài)方程和預(yù)測方程如式(2)所示:

其中,Xk+1為系統(tǒng)的狀態(tài)向量,Φk+1,k為狀態(tài)轉(zhuǎn)移矩陣,Tk+1,k為控制系數(shù)矩陣,Uk為系統(tǒng)控制輸入,Γk+1為噪聲系數(shù)矩陣,Wk為系統(tǒng)的過程噪聲序列,Zk+1為系統(tǒng)的觀測序列,Hk+1為觀測矩陣,Vk+1為觀測噪聲序列。
使用陀螺儀數(shù)據(jù)建立線性模型,如式(3)所示:

其中,θk為飛行姿態(tài)角,βk為陀螺儀輸出的誤差,Uk是陀螺儀輸出的角速度數(shù)據(jù),ΔT是采樣時間間隔。因為陀螺儀輸出的誤差整體來看變化不大,可認(rèn)為βk+1=βk。因Wk對系統(tǒng)影響甚小,這里規(guī)定Wk=0。
由以上建立狀態(tài)矩陣方程,如式(4)所示:
陀螺儀和加速度計測量姿態(tài)角時各有優(yōu)缺點,為獲得比較可靠的姿態(tài)角數(shù)據(jù),必須對兩者的數(shù)據(jù)優(yōu)勢互補(bǔ)。以上算法用加速度計數(shù)據(jù)得到不同階段的測量噪聲協(xié)方差,并帶入解算過程中,大大減少了姿態(tài)角的測量誤差。
3 Kalman硬件實現(xiàn)
目前Kalman濾波器的實現(xiàn)方式主要有PC機(jī)和DSP兩種方式,PC機(jī)可以同時滿足計算精度和實時性的要求,但是PC機(jī)體積大、質(zhì)量重、成本高;DSP實現(xiàn)的Kalman濾波器雖然體積小,質(zhì)量輕,但是因其指令順序執(zhí)行的CPU架構(gòu),在系統(tǒng)復(fù)雜時無法滿足系統(tǒng)的實時性要求[6-7]。
因此,Kalman濾波器在工程應(yīng)用中的實現(xiàn)遇到了系統(tǒng)體積、重量、成本與系統(tǒng)精度、速度等性能不能兼顧的問題。FPGA是解決這一問題的有效途徑,F(xiàn)PGA具有極高并行度的信號處理能力、高度的靈活性、現(xiàn)場可以編程、較短的開發(fā)周期和較低的成本等優(yōu)勢,在數(shù)字信號處理領(lǐng)域已經(jīng)得到廣泛的應(yīng)用[8]。
本系統(tǒng)使用的FPGA芯片是Altera公司Cyclone II系列中的EP2C35F672C6,它共有33 216個邏輯單元、483 840個存儲單元、70個乘法器單元(9 bit)。雖然Altera公司提供了很多功能強(qiáng)大的IP核,其中就包括加減乘除單精度浮點數(shù)運算,但是提供的IP核占用資源過多,所以使用自己編寫的運算模塊。下面以除法模塊為例說明浮點數(shù)運算的硬件實現(xiàn)。
3.1 浮點數(shù)除法模塊
根據(jù)IEEE754標(biāo)準(zhǔn),單精度浮點數(shù)的格式如圖2所示。
通常可用式(11)表示一個單精度浮點數(shù):
從式(12)中可以看到,符號位和階碼的運算比較簡單,尾數(shù)的運算較為復(fù)雜。
設(shè)被除數(shù)為a,除數(shù)為b,第i次的商為qi,第i次得到的臨時余數(shù)為mi,令m0=a,則有式(13):
這樣一直進(jìn)行23次運算便可以獲得全部的qi,23位qi按先后順序組合起來便是尾數(shù)運算的結(jié)果。
除法模塊資源使用情況如圖3所示,只使用了1%的邏輯單元,相比較于IP核的實現(xiàn)方式,大大減少了使用資源。
再用ModelSim仿真觀察除法模塊運算速度,結(jié)果如圖4所示。x1,x2是除數(shù)和被除數(shù),y是商,isdone是標(biāo)志信號,當(dāng)完成一次除法運算后產(chǎn)生一個正脈沖。
由圖4可以看到,除法模塊運算一次共使用了25個CLK周期,完全可以滿足運算要求。
3.2 Kalman硬件模塊
以第2節(jié)中建立的卡爾曼濾波模型搭建硬件模塊,硬件模塊的結(jié)構(gòu)如圖5所示。其中,

為整個Kalman濾波的結(jié)果矩陣,包括橫滾角、俯仰角、偏航角。
Kalman硬件模塊使用資源情況如圖6所示。可見,一共使用了45%的邏輯單元。雖然占用資源非常多,但是45%的資源使用還是可以接受的。
利用Multisim仿真,查看此Kalman硬件模塊的運行速度,結(jié)果如圖7所示。
q1、q2、q3是Kalman濾波解算一次后的3個偏轉(zhuǎn)角(橫滾角、俯仰角、航向角),q1st、q2st、q3st是解算一次完成后產(chǎn)生的負(fù)脈沖信號。從仿真結(jié)果來看,在仿真頻率為100 MHz情況下,Kalman解算一次需要的時間是1 ms,可見用FPGA來實現(xiàn)Kalman濾波速度是很快的。
4 實驗結(jié)果
為檢驗Kalman濾波硬件模塊實際效果,設(shè)計了一次模擬實驗:將云臺置于振動環(huán)境中,改變云臺姿態(tài)角,觀察未經(jīng)濾波處理和經(jīng)過濾波處理的姿態(tài)角。
實驗中使用MPU6050作為系統(tǒng)的姿態(tài)傳感器,MPU-6050是一款整合了3軸陀螺儀、3軸加速度計的6軸運動處理組件,相比較于多組件方案,免除了組合陀螺儀與加速度計時之軸間差的問題,減少了大量的包裝空間。
設(shè)置采樣頻率為1 kHz,以橫滾角為示例,實驗結(jié)果如圖8所示。
濾波前的橫滾角由三軸加速度和式(1)得到,可以看到明顯的噪聲和毛刺。經(jīng)過Kalman濾波后,大部分的噪聲和毛刺都被去除掉了,而且通過濾波前后的橫坐標(biāo)對比可以看到此濾波模塊有著很好的實時性能。
觀察濾波結(jié)果與真實值之間的誤差,如圖9所示。從圖中可以看到,濾波誤差控制在-1.5°~1.5°范圍內(nèi)。可以滿足航拍系統(tǒng)的精度要求。
5 結(jié)論
實驗證明,本文所介紹的硬件Kalman濾波器適用于航拍相機(jī)平臺的姿態(tài)獲取。基于FPGA的硬件架構(gòu)具有靈活的可移植特性和優(yōu)良的抗干擾能力,相比較于DSP和PC機(jī)的實現(xiàn)方式,它在保證航拍系統(tǒng)的精度要求的前提下解決了性能和成本不能兼顧的問題,因此它具有更廣泛的應(yīng)用性和實際工程意義。
參考文獻(xiàn)
[1] 劉先林,段福洲,宮輝力.航空攝影科技發(fā)展成就與未來展望[J].前沿科學(xué),2007,3(3):10-14.
[2] 張祖勛.數(shù)字?jǐn)z影測量發(fā)展與展望[J].地理信息世界,2004,2(3):1-5.
[3] 高同躍,丁衛(wèi),高新聞,等.機(jī)載慣性穩(wěn)定云臺系統(tǒng)的研究[J].2010,18(2):344-347.
[4] 卞鴻巍,李安,覃方君,等.現(xiàn)代信息融合技術(shù)在組合導(dǎo)航中的應(yīng)用[M].北京:國防工業(yè)出版社,2010.
[5] 付夢印,鄧志紅,閆莉萍.Kalman濾波理論及其在導(dǎo)航系統(tǒng)中的應(yīng)用(第二版)[M].北京:科學(xué)出版社,2010.
[6] 謝鑫,郭美鳳,周斌.基于雙DSP和FPGA的高性能導(dǎo)航計算機(jī)設(shè)計[J].微計算機(jī)信息,2009(3):1-2,60.
[7] 張沖,吳秋平.基于PC104和DSP的分布式導(dǎo)航計算機(jī)設(shè)計[J].微計算機(jī)信息,2010(8):27-29.
[8] 米月琴,黃軍榮.基于FPGA的Kalman濾波器的設(shè)計[J].電子科技,2010,23(2):52-55.
編輯:jq
-
濾波器
+關(guān)注
關(guān)注
162文章
7966瀏覽量
180227 -
PC
+關(guān)注
關(guān)注
9文章
2132瀏覽量
155704 -
IP
+關(guān)注
關(guān)注
5文章
1755瀏覽量
150866 -
CLK
+關(guān)注
關(guān)注
0文章
127瀏覽量
17428
發(fā)布評論請先 登錄
相關(guān)推薦
無人機(jī)云臺+索尼FCB-ER9500:打造專業(yè)航拍利器
LC濾波器和RC濾波器有哪些差異
無源濾波器和有源濾波器的區(qū)別
emi濾波器是什么濾波器
陷波濾波器怎么進(jìn)行濾波
陷波濾波器和超前滯后濾波器的基本概念、工作原理及性能特點
陷波濾波器和低通濾波器的區(qū)別是什么
陷波濾波器和帶阻濾波器有什么聯(lián)系,有什么區(qū)別
iir濾波器和fir濾波器的優(yōu)勢和特點
高通濾波器和低通濾波器判別方法
低通濾波器、高通濾波器、帶通濾波器的簡單介紹
聲表面波(SAW)濾波器和體聲波(BAW)濾波器詳細(xì)介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論