 創造一個不受外界幫助的軟體機器人
創造一個不受外界幫助的軟體機器人
為創造一個不受外界幫助的軟體機器人,MIT CSAIL 將目光聚焦于深度學習。 ”
說起軟體機器人,或許很多人都不覺得陌生了。
軟體機器人的發展離不開包括材料學、機器人學、生物力學、傳感與控制在內的多學科進步,近年來相關學科迅速發展,各類軟體機器人也開始涌現。
機器人與自動化國際會議 ICRA 2017 的會場上,曾參與發明達芬奇手術機器人的香港中文大學機械與自動化工程學系副教授 Samuel Au 這樣向雷鋒網表示:
軟體機器人在醫療領域的應用十分廣泛,甚至會轉變醫療機器人的范式。軟體機器人是手術機器人的終極目標。
當然,除了醫療領域,軟體機器人還有一個廣闊的市場——玩具。
這個市場中,迪士尼對軟體機器人頗為關注。就在去年,迪士尼研究院(Disney Research)曾基于算法和一種特殊的拉伸傳感器,讓軟體機器人有了「本體感知」的能力。
最近,在世界領先的機器人專家之一 Daniela Rus 教授的領導下,MIT CSAIL 也做出了類似的成果:基于他們開發的算法,軟體機器人體內的傳感器得到了優化,因此能更好地在環境中感受自身、與環境互動。
相關論文題為 Co-Learning of Task and Sensor Placement for Soft Robotics(軟體機器人任務與傳感器布置的協同學習),將于 2021 年 4 月的 IEEE International Conference on Soft Robotics(IEEE 軟體機器人國際會議)上進行展示。
1
讓軟體機器人回答出“我在哪”
很多人的印象中,機器人都有著堅硬的外殼,充滿金屬感,這便是傳統的剛性機器人。通常,剛性機器人關節、肢體的有限陣列通過控制映射和運動規劃的算法使得計算易于掌控。
不同于剛性機器人,軟體機器人不論結構還是材料都是非線性的,且擁有多自由度,因此其動作任務更加復雜,因此對算法的要求非常高。
正如論文介紹的那樣:
軟體機器人必須在一個無限維的狀態空間中進行推理,而映射這個連續狀態空間并不簡單(特別是在基于有限的離散傳感器集工作的情況下,畢竟傳感器位置對機器人任務學習模型的豐富性有著深遠影響)。
上面這段話通俗來講就是,軟體機器人要想可靠地完成程序設定的任務,它們需要知道自己所有身體部位所在的位置,而由于軟體機器人幾乎可以以無限種方式變形,因此這項任務相當艱巨。
為了讓軟體機器人回答出“我在哪”的問題,此前科學家們的策略是:用一個外部攝像頭來繪制機器人的位置,并將信息反饋到機器人的控制程序中。
但 MIT CSAIL 的想法是:創造一個不受外界幫助的軟體機器人。
在研究團隊看來:
不能在機器人身上安裝無數個傳感器,真正的問題是:要有多少傳感器、要把傳感器放在哪,才有最大的性價比?
正因如此,MIT CSAIL 將目光聚焦于深度學習。
他們開發了一種算法,能夠幫助工程師設計出收集更多與周圍環境相關的有用信息的軟體機器人。
具體而言,這種新的協同學習傳感器放置和復雜任務的表示方法,可以處理機載傳感器信息,從而學習突出和稀疏的位置選擇,優化傳感器在機器人體內的位置,保證機器人獲得最優的任務性能。
論文合著者之一 Alexander Amini 表示:
這一系統不僅可以學習給定的任務,而且還能學習如何以最佳方式設計機器人來解決任務。傳感器的放置是一個非常難解決的問題,所以這個解決方案是非常令人興奮的。
論文顯示,由于許多軟體機器人在本質上是呈節點的,因此新架構采用了基于點-云(point-cloud-based)的學習和概率稀疏化。他們的方法將傳感器設計視為學習的雙重過程,在單一的端到端培訓過程中結合了物理和數字設計。
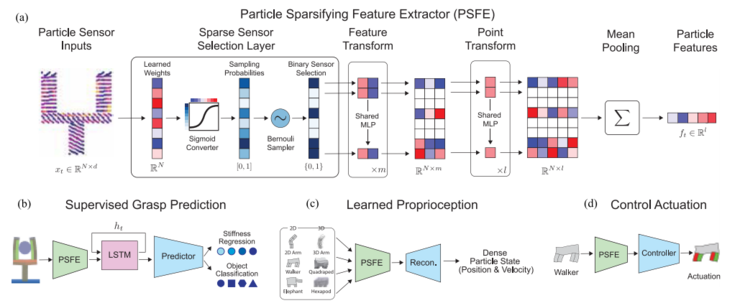
在論文中,研究人員將這種架構稱為 PSFE 網絡(即 point sparsification and feature extraction network,點稀疏化和特征提取網絡)。
PSFE 網絡能夠同時學習傳感器的讀數表示和傳感器的位置。如下圖所示,PSFE 網絡是研究團隊做的所有演示和應用的核心——演示包括對象抓取預測(B)、學習本體感受(C)和控制(D)。
事實證明,在放置傳感器方面,算法的表現大大超過了人類直覺!
總結來看,這項成果的主要貢獻在于:
對應變和應變速率的測量:用于推理軟體機器人狀態的神經結構;
一種適用于下游任務的最小集稀疏化概率傳感器表示,以及一種超越了自動化和人工基線的算法;
兩個任務(7 種軟性機器人形態的觸覺感知和本體感受)中任務學習和傳感器放置協同設計的演示。
論文合著者之一 Andrew Spielberg 表示:
我們的工作有助于實現機器人設計自動化。除了開發控制機器人運動的算法,我們還需要考慮如何對這些機器人進行感知,以及如何與機器人的其他組件相互作用。未來如果在工業上加以應用,影響可能是立竿見影的。
2
關于作者
該論文作者為包括 Andrew Spielberg 在內的三位 MIT CSAIL 在讀博士生以及兩位 MIT 教授 Daniela Rus 和 Wojciech Matusik。
五位作者中,最有名氣的便是 Daniela Rus 教授。
Daniela Rus 是 MIT CSAIL 主任、Andrew and Erna Viterbi 電氣工程和計算機科學教授、IEEE Fellow、AAAI Fellow、美國國家工程院院士,曾于康奈爾大學獲得計算機科學博士學位。主要研究領域涵蓋機器人、移動計算和數據科學。
前不久,福布斯 AI 專欄作家、創業投資公司 Highland Capital Partners 風投專家 Rob Toews 曾撰文,列舉出了 8 位具有代表性的 AI 領域女性領袖,這 8 位女性領袖中包含李飛飛、NVIDIA 工程副總裁、Coursera 創始人,也有 Daniela Rus 的名字。
Daniela Rus 在被問到“機器學習或深度學習最終是否能幫助我們制造出通用型人工智能(AGI)”時,這位 AI 大牛談到,尚無法判斷深度學習最后到底能不能實現 AGI。
在她看來,深度學習可以說是很有潛力,但也存在一些問題:
深度學習需要大量數據去訓練,也就意味著需要很深的理解,而通用型智能的學習方法應該要更“通用”才對。
深度學習還是會犯錯。
實際上我們還不太清楚深度學習的運作原理,不太清楚為什么它表現得這么好。
也就是說,只有當我們對深度學習甚至我們自己有更深的了解之后,才能回答這個問題。
當時 Daniela Rus 也坦言,自己最感興趣的研究領域是機器人:
我我們正在研究如何制造更好的自動化系統,自動化系統能深刻的改變這個世界。改變人們完成任務的方式,并且可以讓我們更好的理解彼此。 如果我們能造出一臺各種行為表現的都和生物很像的機器。那這臺機器的內在原理可能跟生物的內在原理比較相似,我們可能可以通過這種研究加深對我們自己的理解。
如今看來,在 Daniela Rus 帶領下的 MIT CSAIL 朝著自動化系統又邁進了一步。
原文標題:機器人大牛 Daniela Rus 領銜!MIT 新算法實現軟體機器人「本體感知」
文章出處:【微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
211文章
28445瀏覽量
207205 -
深度學習
+關注
關注
73文章
5503瀏覽量
121198
原文標題:機器人大牛 Daniela Rus 領銜!MIT 新算法實現軟體機器人「本體感知」
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】+初品的體驗


【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
高壓放大器在介電彈性體折紙術軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

Al大模型機器人
Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應用

基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性

高壓放大器在介電彈性體折紙術軟體機器人中的應用
用于水質和病毒監測的電驅動軟體機器人開發






 工商網監
工商網監
評論