

作者:劉棟良;嚴偉燦;劉棟良
隨著永磁磁性材料、半導體功率器件和控制理論的發展,永磁同步電動機(pmsm)在當前的中、小功率運動控制中起著越來越重要的作用。它具有如下的優點:結構緊湊、高功率密度、高氣隙磁通和高轉矩慣性比等。因此,在伺服系統中越來越被廣泛應用。另外,永磁同步電動機是一個非線性系統,它含有角速度ω與電流 id或iq的乘積項,因此要得到精確控制性能必須對角速度和電流進行解耦。對于高精度速度跟蹤控制問題,載擾動會對速度波動產生影響。因此,需要對負載擾動進行估計,來減小它的影響。
因此一般的線性控制方法效果不夠理想。為了解決其控制問題,當前采用的非線性控制方法主要有變結構控制、反饋線性化和無源控制等,但這些非線性控制的設計方法比較復雜,不易理解。本文結合矢量控制的坐標變換方法,提出了backstepping控制策略,它不但能夠實現永磁同步電動機系統的完全解耦,設計方法比較簡單,而且控制效果比傳統的pid控制更具有明顯的優越性。另外,通過設計負載轉矩擾動觀測器來降低負載擾動對速度波動的影響。
永磁同步電動機的反推控制
數學模型
采用表面式的永磁同步電動機,其基于同步旋轉轉子坐標的d-q模型[1]如下:
其中:ud, uq是d,q軸定子電壓;id,iq是d,q軸定子電流;r是定子電阻;l是定子電感;tl是恒定負載轉矩;j是轉動慣量;b是粘滯磨擦系統;p是極對數;ω是轉子機械角速度;φf是永磁磁通。
backstepping控制實現
backstepping 作為一種有效的非線性控制設計方法,它是基于李亞普諾夫函數設計的控制,因此設計的控制器能夠保證系統的全局漸近穩定,并且可以達到電流跟蹤的效果,使得系統具有快速的響應速度[2]。
根據backstepping設計步驟[3,4],可以設計實際的控制ud,、uq為:
負載擾動觀測器設計
在一些高精度伺服系統中,負載擾動會產生變化,使速度產生波動,從而導致系統伺服性能的下降。因此,在高精度速度跟蹤控制中,需要對負載擾動進行估計,實時加以在線補償。
由于負載擾動不易直接測量,這里可以通過已獲得的iq、ω加以觀測。考慮到iq、ω的測量會產生噪聲誤差,故在tl觀測器的輸出端附加一濾波器  ,以消除上述的影響。對式(6)取拉斯變換得:
,以消除上述的影響。對式(6)取拉斯變換得:

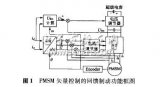
則所設計的負載擾動觀測器如圖1所示。

圖1 負載擾動觀測器
系統實例仿真

圖2 系統控制框圖
基于轉矩擾動估計的永磁同步電動機反推控制框圖,如圖2所示。通過調整參數 使系統達到滿意的配置點。永磁同步電機參數如附表所示。
附表 永磁同步電動機參數

假定速度的參考速度為500r/min,在0.2s突加負載20nm,反推控制參數:
k1=50000,k2=300,k3=20,
t0=0.01
仿真如圖3所示。對圖3中的圓局部放大,如圖4所示。圖4中的曲線1為反推控制下的速度跟蹤曲線,曲線2為引入轉矩擾動估計的反推速度跟蹤曲線。由仿真結果可以看出,反推控制能夠使的系統達到快速的速度跟蹤,同時保證系統具有良好的動態性能。同時,引入轉矩擾動估計的反推控制更能加快了系統的跟蹤速度,減小擾動對速度波動的影響。

圖3 速度跟蹤曲線
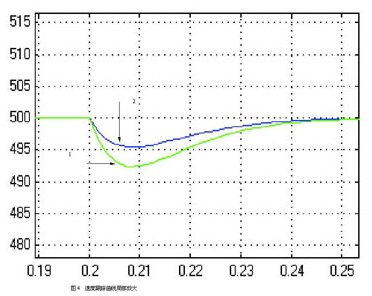
圖4 速度跟蹤曲線
結論及實現

圖5 主程序
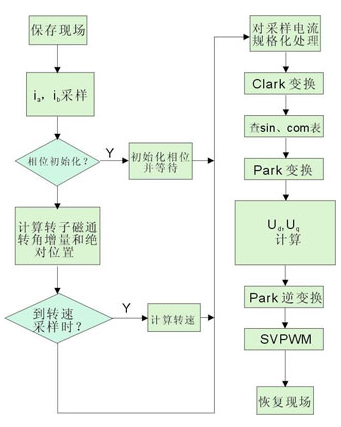
圖6 定時器中斷子程序
為了實現基于負載擾動估計的反推控制方法,特選用電機控制專用dsp芯片tms320lf2810作為數字控制器,并編制相應的軟件來實現。如圖5所示,圖6為定時中斷子程序來實現反推控制策略并產生svpwm。本文把基于轉矩擾動估計的反推控制應用于永磁同步電動機的速度跟蹤中,該設計方法減少了調節參數,簡化了系統的控制設計。通過matlab仿真,表明系統有很好的跟蹤性能,驗證了系統設計的有效性和可行性。另外,此控制策略已應用于浙江省計劃重點項目:“全數字交流通用伺服驅動系統”中,它表明,調節參數比pid相對減少,參數整定比較容易,減輕了編程工作,系統取得了良好的效果。
責任編輯:gt
-
dsp
+關注
關注
555文章
8121瀏覽量
354067 -
芯片
+關注
關注
459文章
51901瀏覽量
433394 -
電動機
+關注
關注
75文章
4140瀏覽量
97944
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論