 全面剖析索尼第一輛電動車Vision-S
全面剖析索尼第一輛電動車Vision-S
索尼第一輛電動車Vision-S在歐洲路測
底盤和車身方面,索尼主要采用了博世和本特勒聯合開發的電動汽車驅動系統2.0。麥格納負責制造,在奧地利生產。未來即使量產,主產地應該也在奧地利,因為麥格納整車生產基地主要就是在奧地利,中國土豪鐘愛的奔馳大G、寶馬MINI COUNTRYMAN(R60)、寶馬5系(G01)、捷豹E-PACE、捷豹I-PACE、寶馬與豐田聯手打造的新一代Z4與Supra、Jeep大切諾基、奔馳M級、寶馬X3、阿斯頓·馬丁Rapide都是麥格納代工的,這個號稱汽車制造界的富士康工廠便是位于奧地利格拉茨的麥格納斯太爾工廠。麥格納斯太爾前身是斯太爾-戴姆勒-普赫,曾經是奔馳控股公司,1998年被麥格納買下。順便說一句,斯太爾的槍械也是很出名的,STG-77是最常見的突擊步槍。

索尼一開始就是奔著量產車而來的,如果只是概念車,完全不必勞駕麥格納,博世和本特勒可以輕松完成概念車。麥格納斯太爾也從不為人打造概念車,麥格納斯太爾就是代工廠。
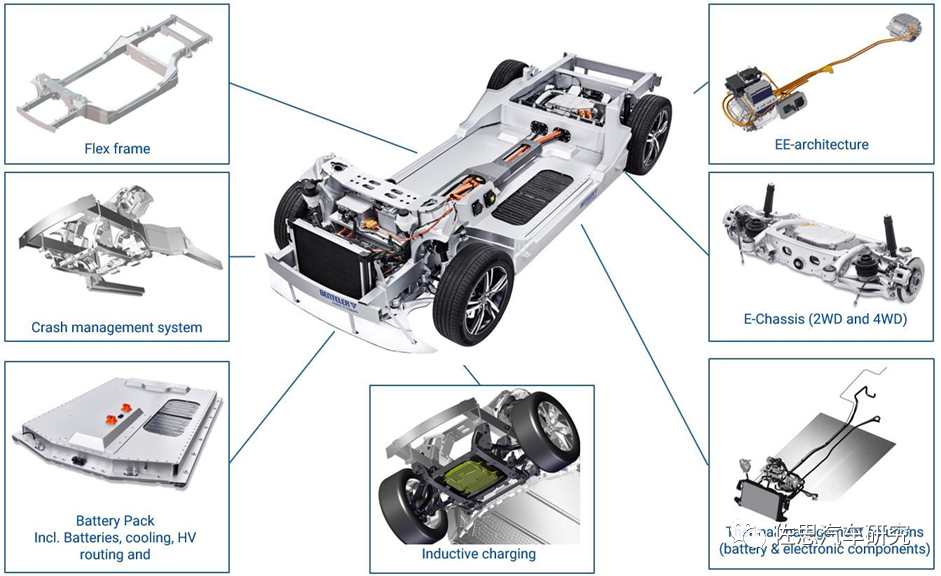
博世與本特勒的電動汽車2.0包括了底盤、基礎的E/E架構、博世的三合一電驅動、電池Pack系統、熱管理系統、感應充電、車架、撞擊管理系統。
柔性框架上的車身具備高擴展性,能覆蓋從B級車到E級車的大部分車型,輕量化、可擴展的車架,采用擠壓鋁型材,可根據不同車型和車身,靈活調整長度和寬度,通過冷連接(無需焊接)技術,是實現高扭轉剛度和最佳碰撞性能的基礎。
模塊化的電池包解決方案,具備出色的能量密度和安全性,該設計能抵抗所有碰撞形式及滿足相關法規要求,采用鋁制型材車架結構,靈活可擴展,集成式電池冷卻,保持電池最佳性能,延長電池壽命。
集成式碰撞管理滿足最嚴格的安全法規要求,專為純電動汽車優化的輕量化碰撞設計,新吸能部件為電池系統提供更好的保護,碰撞管理系統滿足側面柱碰撞和前端側角碰撞要求。
模塊化電動汽車前/后橋,打造最佳駕乘體驗和操縱性,前后懸架模塊搭配高度集成式電動驅動單元,得益于型材在縱向和橫向的剖面長度,副車架具備模塊化屬性,每個副車架都考慮了NVH要求 (噪聲,振動,聲振粗糙度)—優化的橡膠襯套概念,經隔音處理的副車架和附加的電子驅動單元,實現最佳NVH性能。
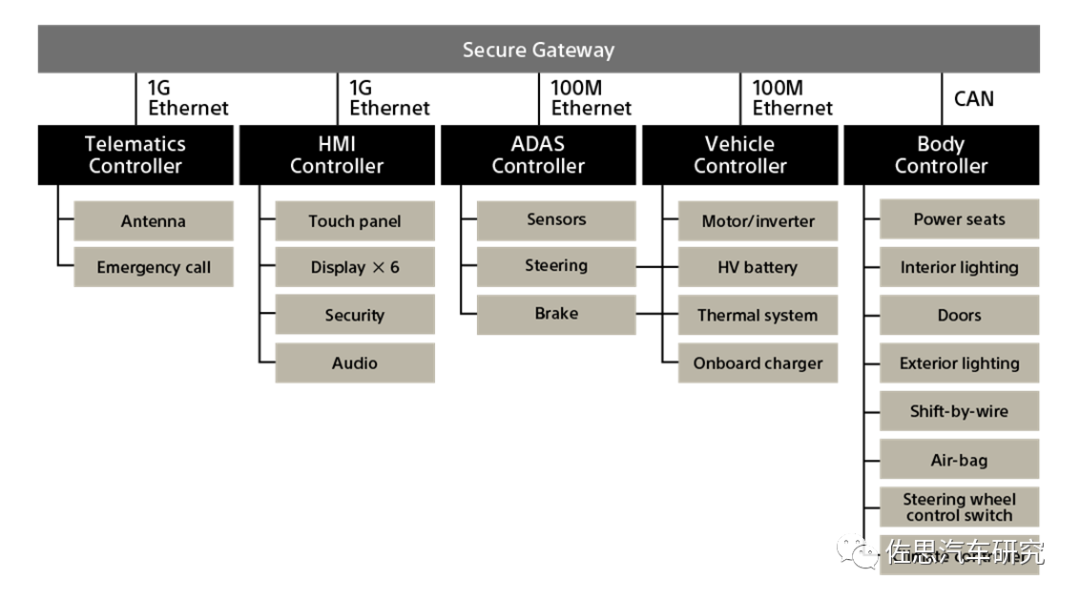
電子架構由博世提供,是博世先進的Zonal架構,遠比特斯拉的傳統架構要先進。
自動駕駛方面,索尼Vision-S有40個傳感器,包括18個攝像頭,6個毫米波雷達、12個超聲波雷達和4個激光雷達。

18個攝像頭中共有三個型號,分別是230萬像素的IMX390、540萬像素的IMX490和30萬像素的ToF IMX456。IMX490性能優異,EMVA標準下動態范圍可達140分貝,是目前動態范圍最廣的攝像頭,還達到了ASIL-D級功能安全,也是首個取得ASIL-D級的攝像頭,能夠祛除LED頻閃。AD10比特精度可達40幀每秒,12比特可達30幀每秒,像素分辨率2896*1876。對比200萬像素,明顯提高了FOV。
在攝像頭解串行方面,索尼不必求助美信的GMSL或德州儀器的FPD-LINK,索尼自己有類似的技術,即GVIF。
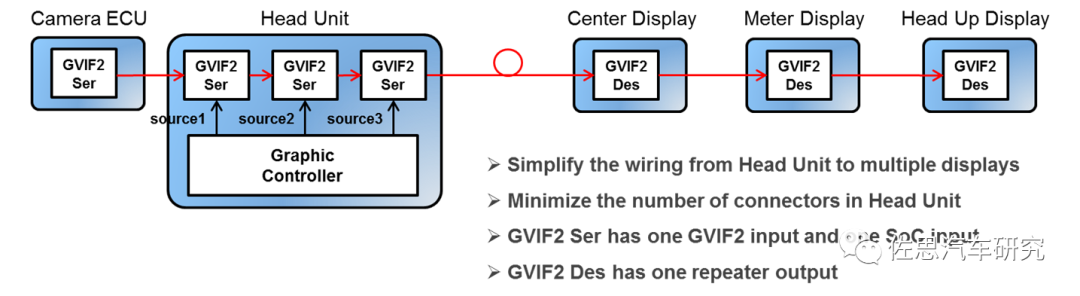
日本豐田特別是雷克薩斯也是使用索尼的GVIF芯片,日本企業一貫喜歡垂直供應鏈,能自己做的絕不假手他人,而中國和歐美企業則相反,能采購的一定從外采購,絕不自己做。GVIF2中的CXD4960ER-W、CXD4961ER-W、CXD4962ER-W、CXD4963ER-W、CXD4960GG-W、CXD4963GG可以支持4百萬像素60幀每秒,因此支持索尼汽車的540萬像素40幀每秒是沒有問題的。
索尼半導體為索尼汽車提供解串行芯片外,還有音頻CODEC、4G、藍牙、WLAN通訊模塊,也為索尼汽車上的AR-HUD提供PGU和全息光波導光機。索尼半導體還能生產激光二極管,也擁有MEMS晶圓廠。此外索尼參股的JDI能提供索尼汽車所需要的所有顯示屏。
索尼的主視覺處理器應該是瑞薩的R-CAR V3U,因為它有針對雙目的硬線對應。日本企業、奔馳和博世是雙目的死忠,即便激光雷達大量普及,也會堅持使用立體雙目攝像頭,并且會是主傳感器。立體雙目在像素密度、幀率、功耗、體積、技術成熟度、有效距離方面仍然超過激光雷達。
索尼的540萬像素雙目在HFOV40度情況下有效距離可輕松達到300米,每秒40幀,通常機械激光雷達的幀率與水平角分辨率是矛盾的,幀率越高,角分辨率越低,傳統機械激光雷達的幀率在5-20Hz之間可調,一般默認是10Hz,意味著0.1秒的延遲無法避免。性能最強的Luminar的幀率默認也是10Hz,索尼的攝像頭是其4倍幀率,延遲減少了很多。
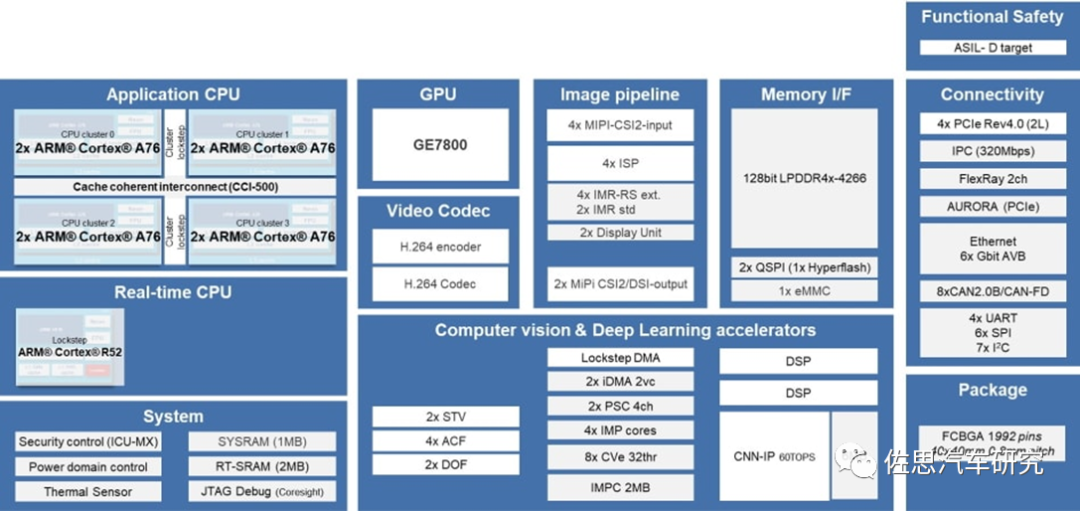
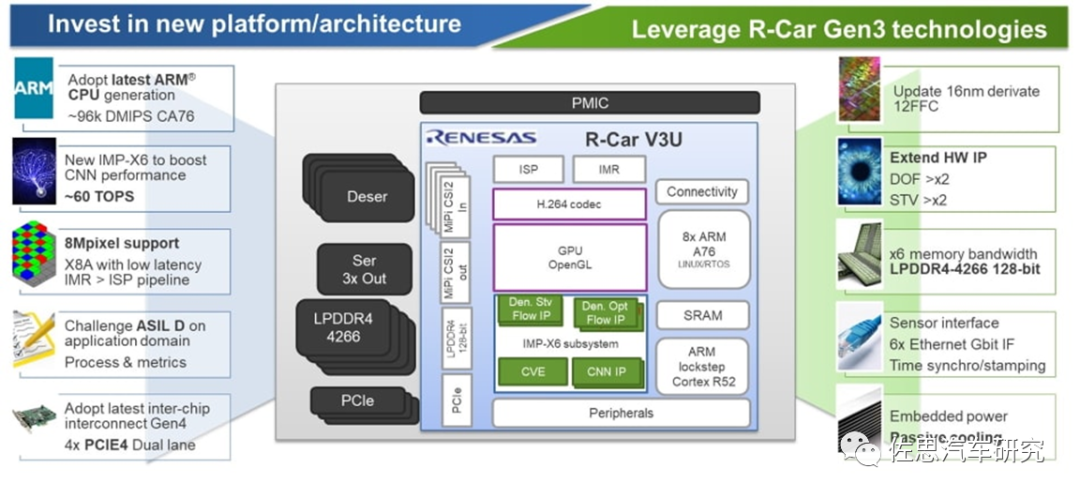
四大自動駕駛芯片廠家只有瑞薩的主業是汽車半導體,因此對車規安全重視程度最高,目標是ASIL-D級。V3U內部框架如上圖,采用8核A76設計,但也不是像特斯拉那樣簡單堆12個A72,它使用了ARM的Corelink CCI-500,即Cache一致性互聯。它提供處理器集群之間的完整Cache一致性,比如 Cortex-A76 和 Cortex-A55,而且可以實現 Big.LITTLE 處理。它還可為其他的設備(如 Mali GPU、網絡接口和加速器)提供I/O一致性。實時鎖步CPU是ARM的R52。
V3U視覺管線如上圖,可以看到V3U有很多硬核計算機視覺模塊,包括立體雙目視差,稠密光流、CNN、DOF、STV、ACF等。功能方面包括圖像格式化、目標追蹤、車道檢測、自由空間深度、場景標注、語義分割、檢測分類等都具備,類似于Mobileye的全封閉算法了。
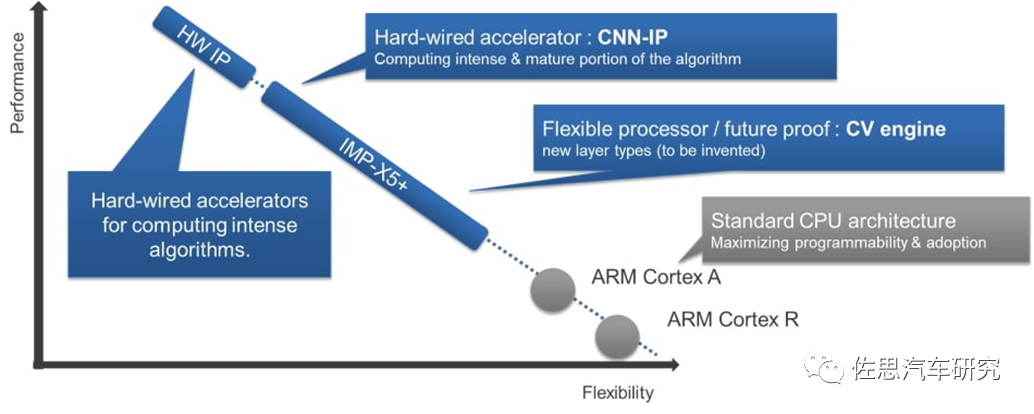
圖像處理主要還是IMP-X5+,靈活性應該比Mobileye還是要高點。因為針對性比較強,也為了節約成本,降低功耗,瑞薩沒有使用太昂貴的GPU,只是簡單增加了一個低功耗GPU,即Imagination Technologies的PowerVR GE7400,1個著色器集群+32個ALU核心,算力只有38.4GFLOPS@600MHz。
考慮到成本因素,瑞薩沒有使用尖端的7納米,而是12納米工藝,并且是從原瑞薩R-CAR H3的16納米FinFET工藝升級到12納米FFC工藝,一次性支出很少。但是論到AI性能,絲毫不次于那些5納米芯片,瑞薩聲稱V3U達到了驚人的13.8TOPS/W的能效比,是頂配EyeQ6的6倍之多。 環視和側視這些視覺處理關系不大,索尼可能使用了英偉達的Xavier,當然至少需要兩片。
索尼的電子倒車鏡上有多達4個攝像頭。
保險桿下方就是激光雷達,索尼完全有能力自制激光雷達,并且是先進程度不次于任何一家激光雷達廠家,因為Flash激光雷達本質上就是個ToF相機,索尼的ToF傳感器優勢明顯,做激光雷達更是手到擒來,易如反掌。從外型上看,這個激光雷達就是Flash激光雷達。
上圖為全球第二大ToF傳感器廠家意法半導體對ToF相機原理的解釋。
上圖為知名Flash激光雷達廠家Ouster的產品實物,就是一個放大版的ToF相機,只是光學鏡頭遠比手機用的ToF相機要大。 現在Flash激光雷達廠家用的SPAD陣列像素大約只有1-2萬,而索尼的試驗產品,已經達到120萬像素,是傳統Flash激光雷達的100倍。需要指出,SPAD陣列只是檢測光反射部分,可以用于任何類型的激光雷達,只是目前Flash激光雷達必須用SPAD陣列。
在2021年2月13日,索尼發布了堆疊型直接ToF傳感器,也就是SPAD陣列,這是索尼針對汽車用激光雷達發布的首個產品。
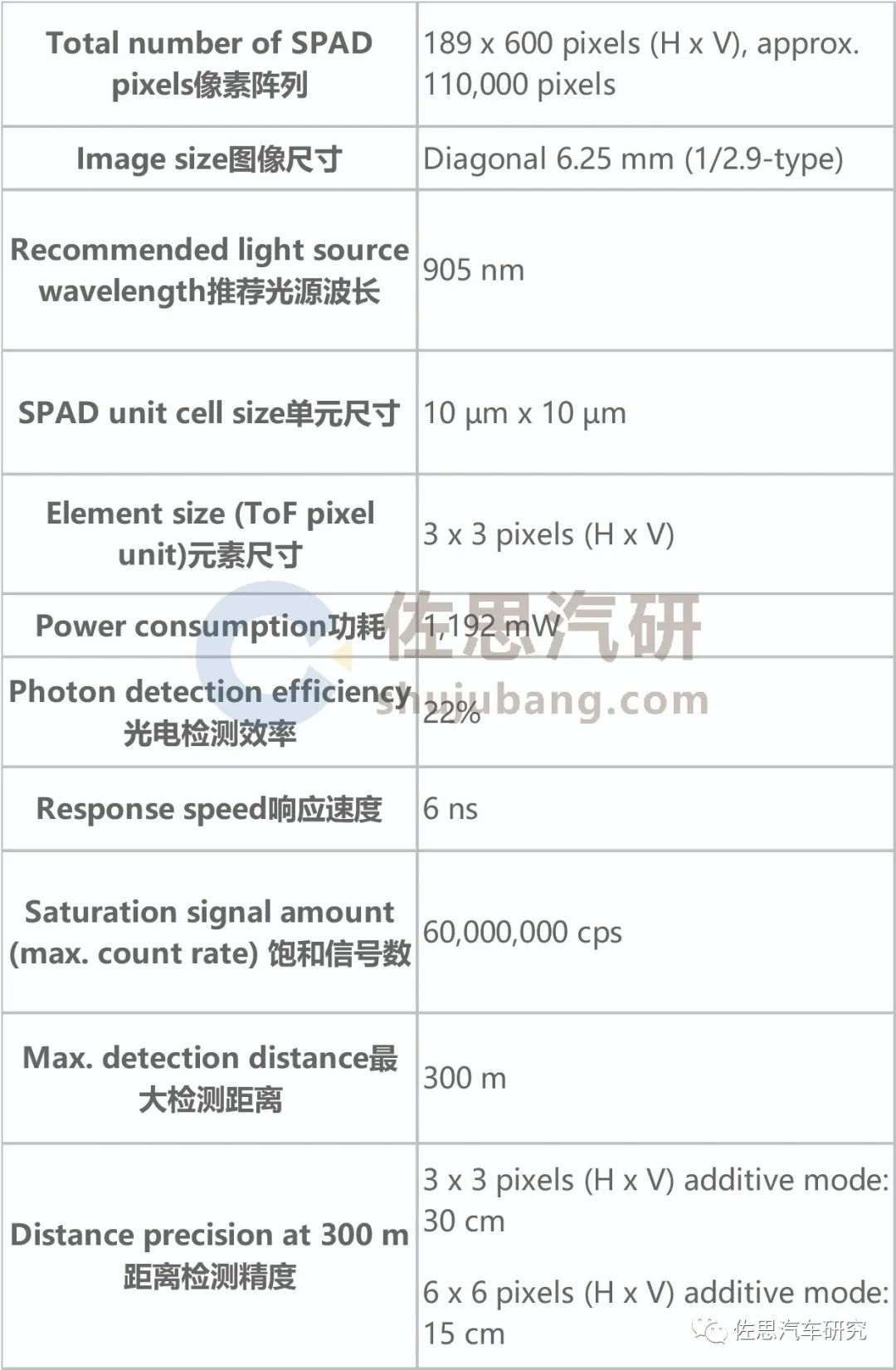
它最強大的地方是最大有效距離高達300米,通常Flash激光雷達是30-50米,當然這和Flash用的VCSEL功率密度低也有關系,提高VCSEL功率密度可以將有效距離增加到200米,但成本增加十幾倍。
索尼Vision-S的座艙與本田e電動車座艙幾乎沒有區別。但屏幕要更大,兩邊的屏幕可能是15英寸,中間的可能是12英寸。兩邊的屏幕分辨率可能是2100*900。后排還有兩個10.1英寸屏幕。
可以任意在幾個屏幕間拖動,包括后排屏幕。 副駕駛處的屏幕可無線連接索尼Playstation,將游戲機畫面投射上去。
ToF深度相機一個用來監測駕駛員的身體動作,判斷駕駛員的健康狀況。
最令人稱奇的另一個ToF深度相機能夠識別唇語,當然索尼Vision S的座艙也能語音識別。
這樣配合傳統的語音識別,準確率會更高,當然目前可能只能針對日語和英語。 索尼計劃在2021年3月28日推出基于Vision S的量產原型車,按日本廠家的一貫風格,概念車與量產車幾乎沒有多少差別,讓我們拭目以待吧。
編輯:jq
-
索尼
+關注
關注
18文章
3207瀏覽量
104931 -
純電動車
+關注
關注
0文章
159瀏覽量
14728
原文標題:索尼第一輛電動車Vision-S全面剖析
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CI522 NFC刷卡電動車儀表方案
碳化硅SiC在電動車中的應用
FOC電機在電動車中的應用
特斯拉2024年第三季度實現全球交付46.3萬輛電動車
特斯拉第700萬輛電動車已成功下線
電動車的鋰電池怎么充電最好
慧能泰HUSB238A EPR 36V/48V電動車取電方案
電動車電動機的構成部件
比亞迪Q1出口近10萬輛電動車 同比增長高達152%
電動車進入電梯識別報警攝像機

電動車充電柜語音提示芯片OTP語音方案選型 WTN6040-8S
自制一輛遙控悍馬







 工商網監
工商網監
評論