") 高精度相機加持下的3D視覺無序分揀系統(tǒng)
高精度相機加持下的3D視覺無序分揀系統(tǒng)
12月22日,2020高工機器人&高工移動機器人年會技術向新專場,熵智科技CTO高磊以“高精度相機加持下的3D視覺無序分揀系統(tǒng)”為主題發(fā)表演講。
數據顯示,2019年城鎮(zhèn)非私營單位就業(yè)人員年平均工資9.05萬元,一線技術員工和高技能人才年薪超過15~20萬元,制造業(yè)人才流失,企業(yè)用工勞動力成本增加,機器換人拐點即將到來。
誰將成為主戰(zhàn)場
而勞動力成本持續(xù)增加,加劇了機器人向各行業(yè)滲透的速度,以汽車行業(yè)為例,2020年相比2011年,汽車零部件領域機器人數量增長10倍。基于視覺的無序抓取技術將進一步拓展機器人應用范圍。
由于3D視覺是從國外發(fā)展而來,所以在應用過程中不可避免的受到了國外市場的影響,衍生出了兩個大方向,那就是物流和工業(yè)。隨著探索的不斷深入,對國情的不斷了解,3D視覺真正的機會正在顯露。
從底層邏輯來講,目前物流領域機器人加視覺系統(tǒng)在物流中屬于單站優(yōu)化系統(tǒng),能做到的就是節(jié)省某些人力成本。但是對于當前的中國倉儲物流行業(yè)而言,還面臨的是基礎建設的問題,即如何提升倉儲密度、最大化提高吞吐量、提升周轉效率,單點優(yōu)化更多的是技術先進性的代表。
而在工業(yè)領域,無序分揀的機會則越來越明顯,尤其是在在重工、汽車等行業(yè)。首先在重工、汽車等行業(yè),機器人的使用已經非常普遍,加裝視覺進行輔助操作并不需要對原有產線進行改造,反而可以一步到位。
其次其生產節(jié)拍相比之下并沒有物流分揀那么快,速度在幾秒到十幾秒不等,更多的要求是定制化,這就完美契合了當下的國內3D視覺廠商立足國內市場的優(yōu)勢,所以近年來重工、汽車行業(yè)對視覺無序分揀的應用開始不斷加快。
作為一家專注于3D視覺無序分揀和超高精度測量檢測的國家高新技術企業(yè),熵智科技總公司位于深圳,另設武漢分公司和西安研發(fā)中心,目前研發(fā)和工程團隊50余人。熵智科技擁有百余項自主知識產權,其中已授權近百項。
自2018年成立以來,熵智科技憑借軟硬件一體的技術優(yōu)勢,為眾多國內外知名企業(yè)提供了成熟的高精尖視覺技術,滿足客戶日益增長的高要求。目前,熵智科技的3D視覺無序分揀系統(tǒng)已成功應用于零部件和重工行業(yè)的多個無序抓取場景中。
高識別成功率+高抓取成功率
“視覺無序分揀的廠家越來越多,也正在進入市場培育期,但對于客戶來講,無序分揀的難度究竟在哪里,很多人其實比較朦朧。”高磊講到。
無序抓取,先識別,后抓取,所以其兩大難點就是如何保證高識別率和高抓取成功率。
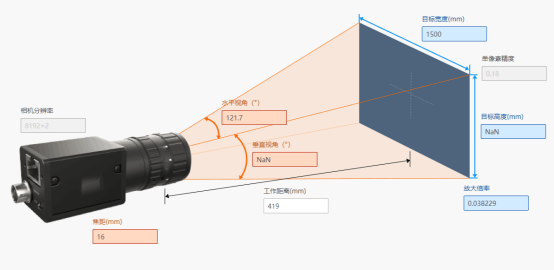
首先來看如何提升高識別率。在很多人的認知中3D視覺已經開始變?yōu)橐粋€純軟件或者軟件占據主導的產品,但這其實是不對的。縱觀當下的視覺/相機產業(yè)鏈,凡是能做到業(yè)內頂尖的,其相機設備一定頂尖。”高磊表示。
例如,工業(yè)現場,天窗、側窗下環(huán)境光直接影響結構光成像,經過現場測量亮度最高可達3300lux。常規(guī)的低亮度光機投射的光柵容易被環(huán)境光淹沒而無法成像。
而采用激光光機(高亮度)的高精度相機更易形成較高的工件識別率,因為無序狀態(tài)的工件,3D點云配準應對多種散亂姿態(tài)比2D DL的方法更有效,工件點云形狀特征越準確,識別率越高,可抓工件選項越多。
“相機代表成像能力,在某些高端/復雜場景下,高精度相機是無序抓取的必備。”高磊表示。
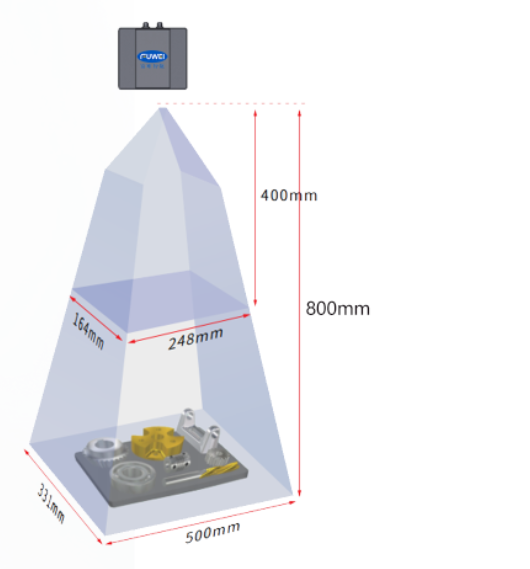
熵智科技自主研發(fā)的激光結構光3D相機,是一種大視野、高精度,適應4000lux環(huán)境光強的結構光3D相機,該產品主要用于大視野3D視覺引導機器人。在覆蓋長寬深1.2m*1.0m*0.8m料框的視野下,手眼標定誤差在2mm以內。
按照標準流程標定完畢后,無需額外人工經驗補償,直接可用,不依賴于外接參照物,更換手抓或更換料框無需重新標定,集3D視覺、深度學習、運動規(guī)劃等技術為一體,采用圖形化免編程,可進行模塊化拖拽、連線、參數配置,免編程部署工程項目流程等功能。
其次,就是如何提高抓取成功率,這里面要搞明白的是相機識別位姿與抓取位姿的關系。
首先來看較為常見的3D視覺引導上料(3D Picking),其無需工裝治具,換產快,可適用于工件位姿未知,傾角30°以內的工料,其識別位姿=抓取位姿,僅需避碰,無需抓取規(guī)劃。
而最新的無序分揀上料(Bin Picking),雖然其和3D視覺引導上料一樣無需工裝治具,換產快,但其可以識別傾角-90~90°位姿未知的來料,可以做到1種識別位姿適配幾十種抓取位姿,避碰的基礎上,優(yōu)化抓取位姿。
“以我們做的汽車零部件外球籠案例為例,其每一個輪轂上面都有一個傳動的零件,機器人會面臨多抓取點、多抓取姿態(tài)、可抓工件更多。通過我們的相機,我們最終給出的解決方案包括獨特的30度傾角手手抓、力控感知工件疊壓、自動更換抓取目標、減少異常停機次數、抓取二次Check、檢測異常、快速恢復、定點工具等多種功能,保證客戶降本增效。”高磊講到。
簡單來說,常見的運動規(guī)劃是指機械臂伸入料框,抓取依賴機械臂本體運動學模型,其自研和維護機械臂本體技術,可靠性有待進一步驗證;而熵智科技的抓取規(guī)劃,手抓伸入料框,機械臂在料框外,不依賴機械臂本體運動學模型,系統(tǒng)更成熟可靠,采用的是可靠的機械臂本體技術+成熟的抓取規(guī)劃技術。
總結下來就是抓取姿態(tài)比機械臂運動軌跡更有效,更易提高抓取成功率。
“所以,綜合來看,工業(yè)應用從來都是軟硬件結合,如果只擁有某一個單類,永遠會受制于人或者遇到瓶頸。死磕核心硬件,專注于工業(yè)級3D相機硬件和軟件,以自主研發(fā)的優(yōu)勢成像系統(tǒng)+視覺項目團隊的二合一,就是熵智科技未來打贏‘視覺淘汰賽’,在視覺行業(yè)扎根的資本。”高磊說道。
原文標題:【拓斯達 | 高工年會】熵智科技高磊:高精度相機加持下的3D視覺無序分揀系統(tǒng)
文章出處:【微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
211文章
28526瀏覽量
207585 -
相機
+關注
關注
4文章
1358瀏覽量
53735 -
3D視覺
+關注
關注
4文章
434瀏覽量
27558
原文標題:【拓斯達 | 高工年會】熵智科技高磊:高精度相機加持下的3D視覺無序分揀系統(tǒng)
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
UV光固化技術在3D打印中的應用
網絡研討會: Teledyne FLIR IIS Forge 5GigE高速高精度機器視覺工業(yè)相機

友思特分享 1小時800件?Ensenso 3D相機如何加速智能機器人的分揀效率

OpenCV攜奧比中光3D相機亮相CVPR 2024
3D視覺引導方案解決工廠產線上下料難題
3D視覺技術無序抓取引導活塞桿

奧比中光攜多款3D相機深度參與國內3D視覺最高規(guī)格會議

解決方案|基于3D視覺技術的鋁合金板件刷油烘干自動化上下料


智能機器人3D視覺無序抓取 #智能機器人 #人工智能 #3D視覺 #無序抓取 #視覺引導 #工業(yè)機器人
泰來三維| 高精度工業(yè)3D掃描助力模具檢測和逆向設計“數字化”發(fā)展

高精度彩色3D相機:開啟嶄新的彩色3D成像時代

芯歌激光3D輪廓相機在汽車行業(yè)的解決方案






 工商網監(jiān)
工商網監(jiān)
評論