 一種可攜帶線纜驅動的踝關節外骨骼
一種可攜帶線纜驅動的踝關節外骨骼
34 歲 MIT 博士后楊興幫的人生格外 “硬朗”,他生于年平均氣溫僅有 3.3℃ 的黑龍江省綏化市,本科和博士(直博)均畢業于北航。目前已經身為人父的他,談及今年夏天結束博后研究時去向,答案只有四個字:回國任教。
而他的研究領域也很硬 —— 康復輔助醫療,去年其作為通訊作者在《信息與電子工程前沿》(Frontiers of Information Technology & Electronic Engineering)上,發表了以《可實現跖屈 - 背屈雙向運動輔助的線纜驅動可攜帶式踝關節外骨骼》(“An untethered cable-driven ankle exoskeleton with plantarflexion-dorsiflexion bidirectional movement assistance”)為題的論文。
論文介紹了一種可攜帶線纜驅動的踝關節外骨骼(下稱 “外骨骼”),他告訴 DeepTech,該設備主要面向踝關節功能未完全受損的足下垂患者,目的是通過機械訓練讓其恢復健康。
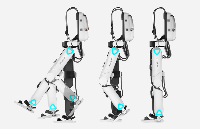
圖 | 可攜帶線纜驅動的踝關節外骨骼
由于腦卒中、脊髓損傷或外傷等原因,足下垂患者的腳尖會不由自主地往下拖,稍不注意就會走路跌倒,進而引起關節損傷。而外骨骼擁有雙向運動輔助功能,可通過主動控制把患者腳尖拉起來,從而保障正常行走。
楊興幫表示,外骨骼的目標是讓用戶穿上后,能獲得走路所需的關節力矩(力對物體作用時所產生的轉動效應的物理量),同時提供正常的矯正步態,理論上患者不用出力就能正常行走。
外骨骼有七公斤重,主包含四部分:腳踝外骨骼、電源輸出模塊、線纜傳輸系統、傳感及控制模塊。
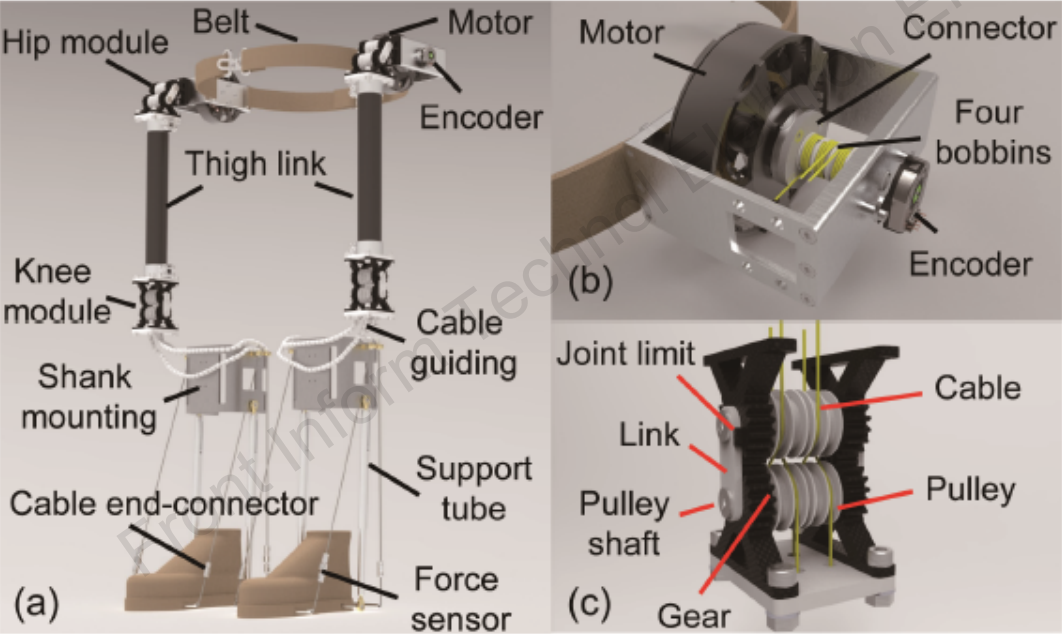
圖 | 腳踝外骨骼(a)的概述、電源輸出模塊(b)的概述以及線纜傳輸系統(c)的膝部模塊的詳細示意圖
第一部分是腳踝外骨骼,是外骨骼的主要執行部分,其主要作用在腳上,上部與一些管件連接,這些管件是線纜傳遞動力的通道,可對下肢起到保護作用;
第二部分是電源輸出模塊,內含 22.2V、容量為 5300mAh 的鋰電池;
第三部分是線纜傳輸系統,負責將電機動力傳遞到末端,從而為腳步踝關節運動提供動力,并能起到輔助換向作用;
第四部分是傳感及控制模塊,主要通過足底壓力傳感器和 IMU( Inertial Measurement Unit,一種與人體兼容的傳感器)實現步態實時識別,并通過控制系統按照腳踝輸出力矩的規律,來提供仿生力矩從而輔助患者運動。
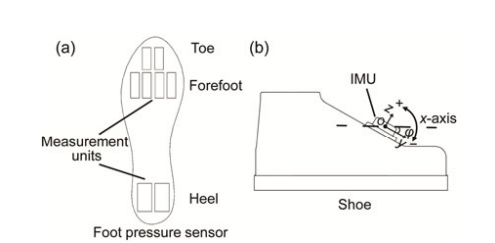
圖 | 足部壓力傳感器(a)的腳趾、前掌和腳跟的測量單位以及 IMU(b)的放置
具體工作時,主要涉及到以下步驟:首先,線纜會把動力從系在腰部的電機傳遞到腳部踝關節;其次是步態信息采集和識別,該設備采用足底壓力傳感器和 IMU 相結合的方式來采集行走信息,通過數據融合實現行走步態的實時識別;隨后,控制模塊將信息進行處理和分析,進行步態預測、并按照實時步態的特定時刻,來提供與腳踝力矩相同的輔助力矩,使設備力矩輸出與人體步態實時結合,從而實現更好的人機相容。
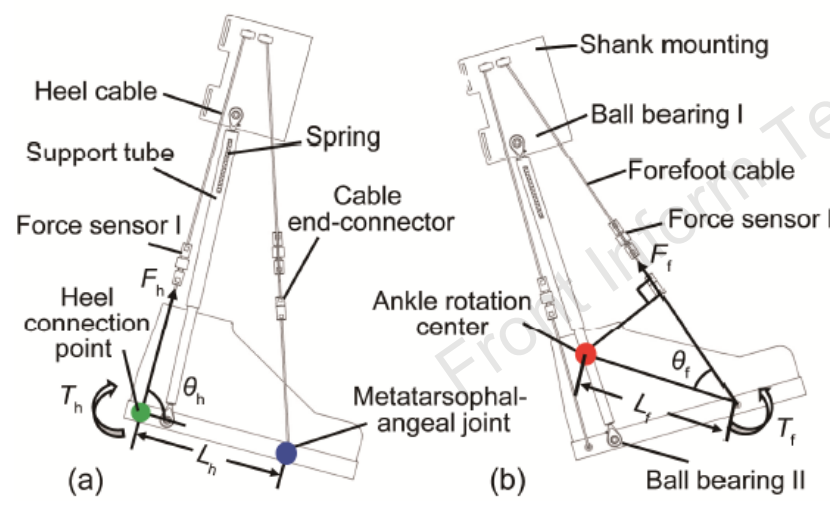
圖 | 外骨骼在矢狀面上踝關節運動的受力和運動分析
比如,用戶在某一步態時刻所需要的踝關節力矩,都可根據自身需求及腳踝力矩數據設定好,此外外骨骼還能根據行走步態、將助力曲線輪廓做實時變化,也能通過歷史步態規律來實時預測當前步態。
雙向運動設計 + 腰部負重線纜系統,用戶佩戴更輕松
相比此前多數同類設備,外骨骼可實現雙向運動輔助。人體腳踝的雙向運動,指的是踝關節可以朝兩個方向運動,腳平時可以往上或往下轉動,往上轉動叫背屈,往下轉動叫跖屈。
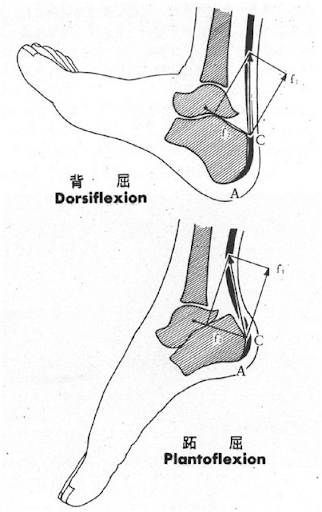
圖 | 背屈和跖屈
此前也有設備可做雙向運動輔助,但設備普遍較重,因為它們大多把電機裝載在末端即靠近腳踝處進行驅動,這樣末端附加的轉動慣量就會比較大,用戶要消耗力氣也更大,設備對末端的控制精度也會打折扣。
基于此,該團隊提出了線纜驅動方案,通過腳跟和前掌的 4 根線纜提供動力、配合齒輪 - 滑輪換向結構以及運動控制,實現了踝關節跖屈 - 背屈的雙向運動。優點在于可將主要質量集中在身體近端,減小身體遠端的質量,從而減小附加轉動慣量,佩戴起來更輕更舒適。
而雙向運動輔助的好處,是能提高腳踝輔助功率,其原理是人腳在行走過程中,肌肉做功雖然主要在跖屈階段,但在腳離地擺動階段,也會有一個背屈運動,如果加一個輔助力,就能讓人更省力。
值得一提的是,外骨骼的主要動力部件集中在腰部,通過線纜傳輸系統將輔助力傳遞到腳步。這樣做的好處是可以減少身體末端負重,因為身體下端負重越大,附加轉動慣量越大,佩戴就越不舒服。
比如,一些運動員為訓練腿部肌肉,會在腿部或腰部穿沙袋,正是為了增加末端負重,增加肌肉訓練強度。末端負重越大、力臂就越長,驅動負載所需的力矩也就越大,但對正常人來說,這個力矩其實是多余的,反而會增加穿戴者的能量消耗。
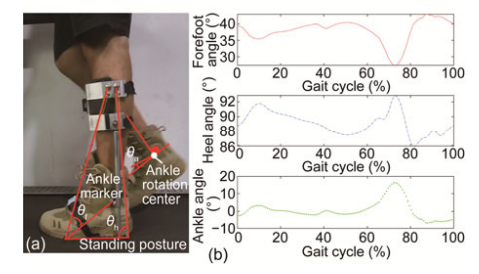
圖 | 測量前腳拉索角 θf、后跟拉索角 θh 和腳踝旋轉角 θa
從人體功效設計角度來說,將重量都放在人體近端,遠端少放一點,那么腳部外力(慣性力)就會更小,抬腳也比較省事。因此,減少多余的轉動慣量,為的就是減小人體做的無用功,從外骨骼角度來說,還能減小外骨骼的功耗并提高控制效率及精度。一言以蔽之,如果不想讓用戶自己去克服,那就需要讓機器來克服。
為測試設計效果,在無 EXO(外骨骼)、有 EXO 斷電和通電三種條件下,受試者佩戴上外骨骼后的小腿比目魚肌運動量分別有所不同。當受試者穿著助力功能開啟的外骨骼時,比目魚肌的活動比不穿外骨骼時減少了 5.2%,比穿戴助力功能關閉的外骨骼時節省了 16.7% 的能量。
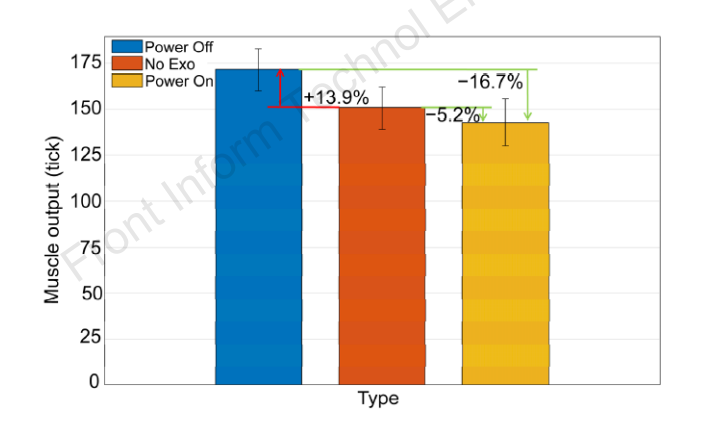
圖 | 測試效果
在設備研發過程中,該團隊專門研發出力反饋控制算法,還開發出了識別步態狀態的仿生控制功能。仿生控制可追蹤生物腳踝力矩,只有知道用戶的具體步態時刻,才能在確定的步態時刻給到特定值。同時,只有知道特定步態和特定時間點的力,才能判斷外骨骼需要在何時給力,這一過程就叫人機步態同步。
在測試中,一位 22 歲的佩戴者穿上外骨骼,就可實現在跑步機上行走。楊興幫說,未來外骨骼有望實現讓用戶在跑步機上跑步。長遠來看,外骨骼也可對任意健康人群施加行走助力和跑步助力,但考慮到速度和沖擊的影響,還需在結構和功率上加以改進。
圖 | 佩戴外骨骼在跑步機上行走
博后跟隨 MIT 仿生義肢權威休?赫爾,數月后即將學成歸國
楊興幫的博后導師是休?赫爾(Hugh Herr),后者是 MIT 媒體實驗室生物機械電子組的負責人。談及來到該小組做研究,他說自己發郵件和赫爾聯系過幾次,對于赫爾研究的康復輔助設備他也非常感興趣。與此同時,北航目前也在全力支持生物醫學的發展。經過面試后,楊興幫順利來到該實驗室。
圖 | 麻省理工學院(MIT)教授休?赫爾
赫爾是 MIT 的終身教授,17 歲時因爬山遇暴風雪雙腿凍傷而截肢,然而他并沒有一蹶不振,悲天憫人,此后多年他不僅自研假肢繼續攀巖,還成為仿生義肢的科研領軍人物,并成立公司落地了多款產品。能跟著如此重磅的導師做科研,對于楊興幫未來歸國任教,一定會大有裨益。
2021 年 8 月,楊興幫即將結束博士后研究,他表示到時肯定會回國任教,以及繼續研究仿生機器人和康復輔助醫療。
現在雖然他人在美國,但也在遠程協助北航的導師帶學生。這位博后爸爸,有一個 2 歲半的兒子。對于幾個月后回國發展,這位家鄉位于東北的學者有著自己的愿望:“在教學上,我比較喜歡分享自己的所學和所感,也比較喜歡將自己所知教授給學生;在科研方面,我比較享受科研成果產出所帶來的樂趣,希望能研究出造福于運動缺失患者的技術;從國家需求方面,我很愿意投身生物醫療相關技術及康復設備的研究。也就是希望在滿足國家需求的同時,還能結合自己的興趣做出一些成果來實現自我發展。”
責任編輯:lq
-
控制模塊
+關注
關注
2文章
131瀏覽量
18876 -
線纜
+關注
關注
5文章
554瀏覽量
29079 -
傳輸系統
+關注
關注
0文章
153瀏覽量
37212
原文標題:34歲北航博士研發踝關節外骨骼系統,師從MIT仿生假肢宗師Hugh Herr,即將學成歸國任教|專訪
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
為電機一體化應用提供一種大電流單通道集成電機驅動芯片

步行助力外骨骼機器人
aoc線纜和普通光纖區別
mpo線纜是什么
想了解人工關節材料疲勞測試?看這里!

「知識講堂」外骨骼康復機器人醫療器械分類、標準、注冊指導原則

一種供電總線技術POWERBUS二總線
北卡羅來納州立大學突破:模擬框架加速外骨骼機器人控制系統開發
北卡羅來納州立大學:加速外骨骼機器人控制系統的研發
mpo線纜就是光纖嗎?
佐治亞理工開發通用機器人外骨骼控制技術
常見的多關節機器人有哪些?具有什么特點?

一種高效1.5V/4.2V的LED驅動器電路
基于溶解性微針和粘合性透皮貼劑的給藥系統,用于治療類風濕性關節炎

「外骨骼機器人」顛覆康復行業格局,重塑千億康復市場!





 工商網監
工商網監
評論