
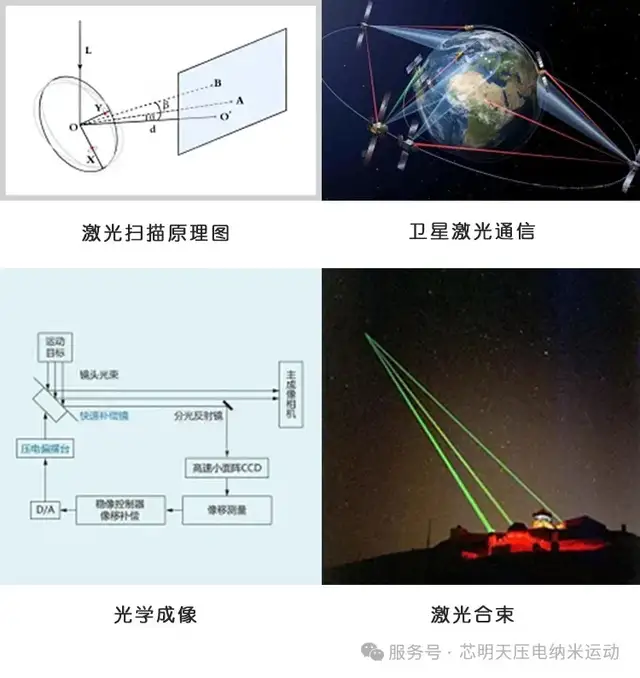
在成像、光通信等激光的應用中,激光光路的穩定都是至關重要的。
為使得激光在傳輸過程中的穩定,芯明天利用壓電偏轉鏡搭建了一階與二階的激光穩定系統。根據光源的不同而選擇,例如平行光,采用一階激光穩定系統即可;而點光源,因其光斑的位置會有偏移,需要額外的位置校正,則需要二階激光穩定系統來調節。
一階激光穩定系統
一階激光穩定系統的搭建結構如下。
系統中部件分別為:
① E70.D3S壓電控制器,用于控制干擾用壓電偏轉鏡;
② E70.D3S壓電控制器,用于控制補償用壓電偏轉鏡;
③ P33.T2K壓電偏轉鏡,產生干擾信號,使激光產生抖動;
④ P33.T2K壓電偏轉鏡,產生補償信號,使激光穩定;
⑤ 激光器,光源;
⑥ 激光位置探測器,實時探測激光的位置
⑦ 電腦,閉環補償控制與補償效果顯示。
一階激光穩定系統結構原理
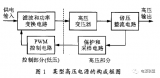
該系統是采用外部位置探測器進行閉環的壓電偏轉系統,預先設定了光束接收的目標位置坐標,光源通過干擾壓電偏轉鏡、補償壓電偏轉鏡的反射后,到達PSD位置探測器。原理圖如下所示。
采用外部PSD位置探測器的快速壓電偏轉系統原理圖
PSD位置探測器可對光束的光斑進行實時位置檢測,并反饋給補償壓電控制器,補償壓電控制器對PSD位置探測器反饋的傳感器信號進行采集、放大,同時向補償壓電偏轉鏡輸出相應的補償控制電壓信號,補償壓電偏轉鏡根據補償控制電壓信號進行快速角度調整,使得光信號準確、完整的接收,從而達到成像或光通信等目的。
與采用內置傳感器的閉環版本壓電偏轉鏡相比,開環壓電偏轉鏡具有更快的響應速度及更高的分辨率,因此采用外部PSD位置探測器檢測,可提高光束的調整速度。另外,PSD可直接對光斑位置進行測量,是光束偏轉方向的直接反應。而內置傳感器的閉環版本壓電偏轉鏡的特點是使得控制電壓與偏轉角度間成線性關系,可保證壓電偏轉鏡的實際偏轉角度與預期控制調整的偏轉角度相一致。
通過計算機顯示可觀看光束跟蹤及穩定情況。
二階激光穩定系統
二階激光穩定系統的搭建結構如下。
系統中部件分別為:
① 激光器,光源;
② E70.D3S壓電控制器,控制干擾用壓電偏轉鏡;
③ E70.D3S壓電控制器,控制補償用壓電偏轉鏡1;
④ E70.D3S壓電控制器,控制補償用壓電偏轉鏡2;
⑤ P33.T2K 壓電偏轉鏡,產生干擾信號,使激光傳輸不穩;
⑥ P33.T2K 壓電偏轉鏡,產生補償信號1,使激光傳輸保持穩定;
⑦ P33.T2K 壓電偏轉鏡,產生補償信號2,使激光傳輸保持穩定;
⑧ 45°分光鏡;
⑨ PSD激光位置探測器1,實時探測并反饋激光的位置;
⑩ PSD激光位置探測器2,實時探測并反饋激光的位置;
? 電腦,閉環補償控制與補償效果顯示。
二階激光穩定系統結構原理
二階激光穩定系統,仍是采用外部位置探測器進行閉環的壓電偏轉系統,同樣,預先設定了光束接收的目標位置坐標,光源通過干擾壓電偏轉鏡、補償壓電偏轉鏡1、補償壓電偏轉鏡2 的反射后,再經過45°分光鏡的分光,分別到達各自的PSD位置探測器。
采用外部PSD位置探測器的快速壓電偏轉系統原理圖
原理與一階的類似,兩個PSD位置探測器分別對接收到的光束光斑進行實時位置檢測,并反饋給各自控制的補償壓電控制器。補償壓電控制器對PSD位置探測器反饋的傳感器信號進行采集、放大,同時向其控制的補償壓電偏轉鏡輸出相應的補償控制電壓信號,補償壓電偏轉鏡根據補償控制電壓信號進行快速角度調整,使得光信號準確、完整的穩定接收, 從而達到成像或光通信等目的。
二階激光穩定系統與一階一樣,采用的是開環壓電偏轉鏡,具有更快的響應速度及更高的分辨率。PSD位置探測器對光束的直接反應信號反饋到壓電控制器,壓電控制器對信號進行讀取并對輸出電壓進行調節,從而壓電偏轉鏡做出快速偏轉。
通過計算機顯示可觀看光束跟蹤及穩定情況。
激光穩定系統軟件控制界面
在該系統中,當開啟補償壓電偏轉鏡之前,位置探測器顯示的效果如下左圖中所示,光斑與目標位置間有偏移;而在開啟補償壓電偏轉鏡后,可從軟件中直觀的看到,光斑穩定在預先設定的目標位置,如下右圖所示。
經過壓電偏轉系統的補償控制,使得光的傳輸更加精確穩定。其中重要的因素就是壓電偏轉鏡有超高的的偏轉精度和超快的偏轉速度。芯明天P33.T2K壓電偏轉鏡與E70.D3S壓電控制器為整個激光穩定過程提供了納弧度級的偏轉精度及毫秒甚至亞毫秒的偏轉響應速度,這在該系統中起著決定性的作用。
系統部件介紹
1,壓電偏轉鏡與壓電控制器
該一階、二階激光穩定系統中,采用的壓電偏轉鏡與壓電控制器分別為芯明天P33.T2K壓電偏轉鏡與E70.D3S壓電控制器。
通常情況下,E70.D3S壓電伺服控制器與壓電偏轉鏡內置的應變傳感器反饋的信號形成閉環控制。而在該激光穩定系統中,采用的是PSD位置探測器反饋的控制信號,與E70.D3S形成閉環伺服控制。
責任編輯:gt
-
傳感器
+關注
關注
2560文章
52148瀏覽量
761401 -
控制器
+關注
關注
114文章
16822瀏覽量
182165 -
探測器
+關注
關注
14文章
2686瀏覽量
73971
發布評論請先 登錄
相關推薦
淺談儲能能量管理系統的功能及應用前景
調式DLP4500,如何確定偏轉角呢?
超高頻示波器的原理和應用
高頻焊接數據記錄系統優化與應用研究

恒壓點焊控制系統的優化與應用研究
P35A.T35系列大行程壓電偏轉鏡
N25.T6K小體積壓電馬達偏擺臺

模塊電源在高壓電源中的應用研究
工地UWB+北斗RTK人員定位系統方案的原理、特點、功能及應用

實時示波器的技術原理和應用場景
蘋果深圳應用研究實驗室正式運營
S31系列小體積壓電偏轉鏡應用于高速、高精度光路偏轉調節!

幾種不同的光束偏轉系統對比





 工商網監
工商網監

評論