 基于超短波數傳電臺的防空警報遙控系統的應用方案
基于超短波數傳電臺的防空警報遙控系統的應用方案
作者:李寶亮,徐筱麟,閆仁強
人民防空是國防的重要組成部分,也是現代城市建設的重要內容。防空警報遙控系統作為戰時指揮的“神經”和“耳目”,是人民防空的重要一環。防空警報遙控系統由警報控制中心和警報器組成,警報控制中心根據需要通過有線或無線的方式控制警報器發出相應的警報音響信號通知市民,警報器的將自身狀態及時回示給警報控制中心。目前,系統所采用的無線控制方式多為大區制集中式控制,即警報控制中心在高處建立一個大功率的發射塔,直接與所有警報器通信。但隨著城市規模不斷擴大,城市高樓越來越多,使得警報控制中心無線電信號覆蓋整個城市越來越難,需要不斷地增加中繼臺以轉發信號。而且固定警報控制中心發射塔作為大功率輻射源戰時易受敵方攻擊,生存能力弱,二次報警和多次報警能力得不到保證。
針對上述無線控制方式的不足,提出了一種基于超短波數傳電臺的無線多跳防空警報遙控系統。在該系統中,每個警報器節點不僅可以與警報控制中心直通,還能根據需要自動轉發警報信號。因此,中心發射臺的警報信號便能經過多跳到達每一個警報器。這就大大降低了中心發射塔的發射功率,使其便于移動隱蔽,提高了生存能力,也解決了無線大區制方式下無線電信號覆蓋難的問題。從一跳到多跳通信方式的轉變需要該系統采用新的路由協議,本文設計了一種適合于系統業務模式和拓撲結構的路由協議。
1 無線多跳防空警報遙控系統設計
1.1 系統設計目標
防空警報遙控系統由警報控制中心和分布在城區的警報器構成。出于戰時生存能力的考慮,系統要求移動警報控制中心可以在全網任意移動,并以較小的發射功率控制整個系統。系統要能夠自動感知節點的移動和節點數目的增減,并選擇合適的路由路徑。系統要有高度的健壯性,部分警報節點被破壞不能影響系統其他部分的正常工作。警報發放的時延不超過1 s。
1.2 系統模型
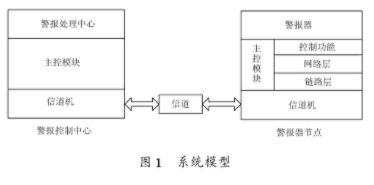
系統模型如圖1所示,警報控制中心和警報器節點均由主控模塊和信道機模塊構成。主控模塊采用嵌入式主機系統,即節點控制器。警報器節點控制器實現節點的多跳組網、分組路由、信道接人、數據鏈路層驅動功能,并根據警報控制信息控制警報器產生各種警報信號。警報控制中心主控模塊主要接收來自警報處理中心的警報分組,送至信道機并接收警報器的回示信息。信道機模塊采用超短波數傳電臺,實現數據和路由信息等在空中接口的傳遞。
2 系統實現關鍵技術
2.1 介質訪問控制協議(MAC)
設計超短波自組織網絡的一個關鍵問題是MAC機制的設計,它協調多個用戶有效地共享有限的超短波信道資源。無線自組網MAC協議主要分為競爭類和資源預留類兩大類。將CSMA/CA等競爭類MAC協議用于超短波信道會出現物理載波偵聽失效、虛擬載波偵聽效率低、暴露終端加劇和捕獲效應明顯等問題,并不適合在超短波信道上直接使用。系統采用TDMA靜態分配方式,并采用一種自動分配算法,根據網絡內節點數目、幀時長度、時隙大小和警報器節點ID,對警報器節點時隙進行分配,每個警報器節點將獲得一個時隙用于數據的發送。
2.2 路由協議
無線多跳防空警報遙控系統有以下特點:通常警報控制中心發射塔的無線電傳輸范圍大于警報器節點的傳輸范圍,造成它們之間存在單向鏈路;警報發放通常以廣播和組播為主;警報器節點數據的發送通常是以警報控制中心為目的地;系統對警報發放的時延非常敏感等。按需距離矢量路由AODV(Multicast Ad Hoc On-demand Vector),動態源路由協議DSR(DynamicSource Routing)協議直接應用于該系統會產生較大的時延,因此并不適合該系統。以一個警報發放過程對路由協議描述如下:
(1)警報分組發放過程。警報分組發放過程采用洪泛法。當警報控制中心有警報要發送時,廣播一個警報分組SC(Siren Control Packet)。SC分組中包括警報控制中心地址,請求ID,目的地址和警報信息。警報控制中心地址和請求ID用于惟一標識一個SC分組。警報器節點收到警報分組后,首先根據SC分組中的警報控制中心地址和請求ID查詢“歷史SC分組列表”,若表中已存在該SC分組的記錄,則丟棄該SC分組;否則,取出該SC分組中的警報指令交由上層處理,同時轉發該SC分組。
若警報器節點可以與警報控制中心直通,則稱其為警報控制中心的臨近節點。非臨近節點的回示分組只有通過臨近節點才能到達警報控制中心。
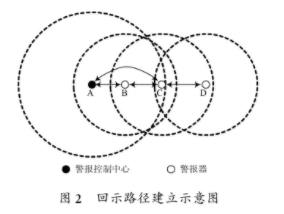
(2)回示路徑的建立。在各個警報器節點洪泛SC的時候,若警報控制中心能夠正確地接收警報節點轉發的SC分組,則證明轉發該SC分組的警報節點是鄰近節點,中心節點把收到的所有臨近節點的地址填入一個Address分組,并在發送SC分組的一個時幀后廣播出去。收到Address分組的警報器節點將Address分組中的地址與自己地址比較,若自己的地址存在于Ad-dress分組中,則該節點為一個臨近節點,構造一個回示通知分組并廣播出去。所有臨近節點廣播的回示通知分組具有相同的警報控制中心地址和請求ID,這樣系統中的警報器節點僅轉發一次該分組,經過回示通知分組在系統內的洪泛,這樣所有的節點都獲得了通過臨近節點到達警報控制中心的路徑,即回示通知分組的逆路徑。如圖2所示,警報器節點B,C能夠聽到A的Address分組,B,C通過比較Address分組中的地址與其自己地址,B發現自己為臨近節點,B廣播一個回示通知分組,C接收到B的回示通知分組后記下該路徑并轉發,D收到C的回示通知分組后并轉發,D也獲得了通過臨近節點B到A的路徑,即3,2,1。回示分組按建立的回示路徑進行單播逐跳轉發至警報控制中心。
3 系統仿真結果
通過網絡仿真工具OPNET構建了系統仿真平臺。仿真將一個警報控制中心和100個警報器節點放置在20 km×20 km的范圍內,模擬一個中等城市的防空警報遙控系統。超短波數傳電臺信道帶寬為19 200 b/s。移動警報控制中心和警報器節點無線發射距離分別為8 km和6 km。系統時隙數128,考慮電臺收發轉換時間為100 ms,同步時間為25 ms,每次發射時間為75 ms,所以設定時隙長為0.2 s,每次可發送數據180 B。
根據防空警報遙控系統的設計目標,設計三組仿真場景,分別選取城市中三個典型的位置作為移動警報控制中心位置,分別為城市中心,次中心和城市邊緣。仿真中業務模式設置為警報控制中心廣播SC分組,各個警報器節點收到SC分組后回示分組。仿真過程中收集警報發放時延和警報回示時延兩個統計量,仿真結果如圖3和圖4所示。
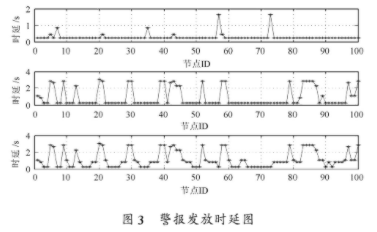
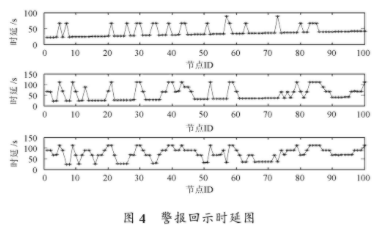
從仿真結果可以看出,警報控制中心能夠以較小的通信范圍控制整個系統,解決了無線大區制集中控制方式下無線電信號覆蓋難的問題。圖3表明移動警報控制中心在不同的位置時警報發放時延均在4 s以內,達到設計目標。由圖4可以看出警報回示時延最大為120 s。防空警報遙控系統對回示的實時性要求并不高,20 s的時延在可以承受的范圍之內。
4 結 語
解決無線大區制防空警報遙控系統中存在二次報警能力弱和中心發射塔無線電信號覆蓋范圍有限等問題是人防建設面臨的迫切問題,本文給出了一個防空警報遙控系統的無線多跳控制方式設計方案,研究確定了其MAC層協議,并設計了一個適合于防空警報遙控系統的路由協議,為解決現有系統中存在的問題提供了一個可供選擇的方案。下一步的工作重點將是研究實現該設計方案。
責任編輯:gt
-
控制器
+關注
關注
112文章
16402瀏覽量
178555 -
無線
+關注
關注
31文章
5462瀏覽量
173492 -
遙控系統
+關注
關注
0文章
23瀏覽量
13371
發布評論請先 登錄
相關推薦
有沒有晶振使用到防空警報器呢?
如何設計出一個超短波雙向功放?
超短波通信電臺射頻功放功率保護控制電路的功用和工作原理介紹
微波和超短波通信設備輻射安全要求 GB12638-1990
基于STM32F407和MAX7349的超短波電臺模擬訓練系統設計與實現






 工商網監
工商網監
評論