

本文提出一套基于毫米波雷達的汽車盲區監測系統設計方案。詳細論述了盲區監測系統的基本原理、測試方法,并將該系統裝配在實車上進行驗證測試,實車測試結果表明,設計的盲區監測系統可以對左右相鄰車道10m以內的目標車進行實時監測,當目標車持續靠近裝有盲區監測系統的車輛時,盲區監測系統及時給駕駛員提供預警信息,避免發生汽車碰撞,極大提升了汽車的智能駕駛輔助水平。
一種AEBS毫米波雷達性能的測試方法,并進行測試應用。該方法測試設備簡單,能夠降低測試成本,同時能夠測試不同廠家、不同型號的毫米波雷達,對新產品的研發具有重要意義。
01、汽車盲區監測系統設計原理
一般情況下,通過觀察外后視鏡,不能看到車輛周圍的全部信息,在車輛行駛過程中,如果駕駛員在變道之前看不到盲區的車輛,此時變道可能發生碰撞事故,盲區監測系統是為了降低這類風險。汽車外后視鏡盲區如圖1所示。
盲區監測系統是當代汽車的一種高科技駕駛輔助配置,主要功能是通過雷達、攝像頭等智能傳感器,對外后視鏡盲區中的行駛車輛進行實時監控,當后方行駛車輛靠近本車時,對駕駛者進行提醒,汽車盲區監測系統示意圖如圖2所示。
同其他傳感器相比,毫米波雷達傳感器具有體積小、質量輕和精度高的特點,并且不受目標物體形狀、顏色的干擾,其波長介于厘米波和光波之間,穿透霧、煙、灰塵的能力強,傳輸距離遠,具有全天候、全天時的特點,彌補了紅外、激光、超聲波、攝像頭等其他傳感器在車載應用中所不具備的使用場景,在汽車盲區監測系統中得到了廣泛應用。
毫米波雷達向外發射電磁波,電磁波遇到障礙物被反射回來,反射回來的回波被雷達接收,經過信號處理和運算,得到障礙物的距離和速度等物理信息。按照毫米波雷達的工作頻率可以將其分為24GHz毫米波雷達和77GHz毫米波雷達。
綜合考慮各種智能傳感器的優缺點,從可靠性、準確性、開發成本以及開發周期等多方面綜合考慮,最終選取77GHz毫米波雷達作為盲區監測系統的感知傳感器,提出基于毫米波雷達的汽車盲區監測系統的設計方案。
該盲區監測系統主要由2個毫米波雷達、控制器、報警燈和相關線束等組成,如圖3所示。2個77GHz毫米波雷達安裝在車身側后方,在行駛過程中對周圍物體進行監測,通過電磁波的回波信號計算物體的距離信息和速度信息,在可能發生碰撞風險時,觸發相應的報警功能,對駕駛員進行提醒,有效提高車輛變道、轉彎的安全性。
該系統由原車供電,通過CAN(ControllerAreaNetwork,控制器局域網絡)獲得整車相關信息,并輸出報警信息、控制信號和狀態信息給相應模塊進行報警提示。汽車盲區監測系統原理如圖4所示。
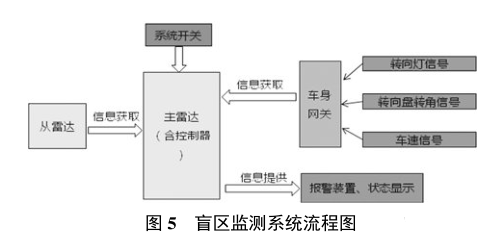
該盲區監測系統中兩個雷達之間為主從關系,主雷達包含控制器,作為控制決策中心,并通過CAN總線與車輛進行通信,并向車輛其他模塊提供相關信號,從雷達只承擔感知作用,并通過私有CAN總線將目標信息發送給主雷達。汽車盲區監測系統流程如圖5所示。
02、汽車盲區監測系統測試方法
2.1車輛盲區監測范圍
根據ISO17387—2008《智能交通系統-變道決策輔助系統-性能要求和測試程序》,車輛盲區監測范圍如圖6所示。圖中的所有尺寸均為相對試驗車輛而言。
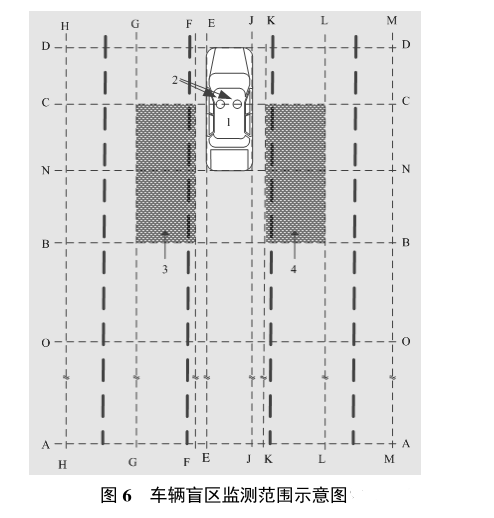
注:1為試驗車輛;2為第95百分位眼橢圓的中心,應符合GB/T36606—2018的要求,以N1類車輛為參考;3為由線F、C、G、B圍成的區域為直線工況下的車輛左側盲區監測范圍;4為由線K、C、L、B圍成的區域為直線工況下的車輛右側盲區監測范圍;線A平行于試驗車輛后緣,并位于試驗車輛后緣后部30.0m處;線B平行于試驗車輛后緣,并位于試驗車輛后緣后部3.0m處;線C平行于試驗車輛前緣,并位于第95百分位眼橢圓的中心;線D為試驗車輛前緣的雙向延長線;線E平行于試驗車輛的中心線,并位于試驗車輛車身(不包括外后視鏡)左側的最外緣;線F平行于試驗車輛的中心線,并位于試驗車輛車身左側最外緣的左邊,與左側最外緣相距0.5m;線G平行于試驗車輛的中心線,并位于試驗車輛車身左側最外緣的左邊,與左側最外緣相距3.0m;線H平行于試驗車輛的中心線,并位于試驗車輛車身左側最外緣的左邊,與左側最外緣相距6.0m;線J平行于試驗車輛的中心線,并位于試驗車輛車身(不包括外后視鏡)右側的最外緣;線K平行于試驗車輛的中心線,并位于試驗車輛車身右側最外緣的右邊,與右側最外緣相距0.5m;線L平行于試驗車輛的中心線,并位于試驗車輛車身右側最外緣的右邊,與右側最外緣相距3.0m;線M平行于試驗車輛的中心線,并位于試驗車輛車身右側最外緣的右邊,與右側最外緣相距6.0m;線N為試驗車輛后緣的雙向延長線;線O平行于試驗車輛后緣,并位于試驗車輛后緣后部10.0m處。
2.2車輛盲區監測試驗方法試驗車輛以(50±2)km/h勻速直線行駛,目標車輛以高于試驗車輛的速度勻速行駛并超越目標車輛,如圖7所示。
起初,目標車輛按照表1規定場景的車速,在試驗車輛的后邊行駛。當目標車輛的前緣超越圖6所示的A線時,試驗開始;
當目標車輛的前緣超越圖6所示的C線3m時,試驗結束。測試完成后應在試驗車輛另一側重復進行該試驗。
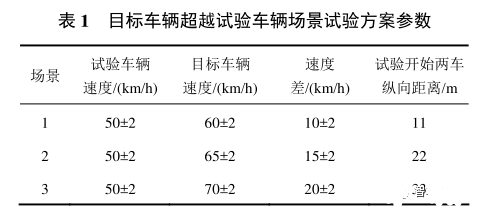
以場景1為例,試驗車輛速度為50km/h,目標車輛速度為60km/h,目標車輛緩慢超越試驗車輛。
圖8中1為試驗車輛,2為目標車輛。通過監控分別記錄左、右側預警燈,將建立預警時與解除預警時目標車輛與試驗車輛之間的距離記錄在測試結果中。
在試驗車輛的相鄰車道分3個區,如圖9所示,當目標車輛行駛至Ⅲ號區域內的任意位置時,如果預警燈亮起(即建立預警),則視為合格;
當目標車輛行駛至Ⅱ號區域內時,如果預警燈常亮(即穩定預警),則視為合格;當目標車輛行駛至I號區域內的任意位置時,如果預警燈熄滅(即解除預警),則視為合格;Ⅱ號區域為汽車盲區監測范圍。
03、實車測試效果驗證
將盲區監測系統安裝在實車上,如圖10所示,兩個毫米波雷達分別安裝在汽車尾部的兩側,系統報警燈安裝在左、右外后視鏡上,將以上各部分通過線束連接好,并按照上述測試方法進行實車路試。
路試結果表明,當試驗車后方相鄰車道10m以內出現目標車時,盲區監測系統可以實時對駕駛員進行預警。
在試驗車向前正常行駛過程中,當有目標車從試驗車后方進入圖6中的盲區監測區域時,系統將觸發一級報警(報警燈常亮提示),若此時打轉向燈,立刻升級成二級報警(報警燈閃爍提示),當目標車駛出圖6中的盲區監測區域時,系統立刻解除報警。
總結本文研究了基于毫米波雷達的汽車盲區監測系統的組成,并對盲區監測系統進行實車測試,其預警功能基本滿足設計要求,有效降低了碰撞發生的概率,對于提高汽車的駕駛輔助水平以及產品競爭力有重要意義。
毫米波雷達發射的是電磁波,電磁波在穿過不同介電常數的物質時會發生一定的折射與反射,這就對汽車后保險杠的材質與形狀有一定的要求。后續將對覆蓋毫米波雷達的塑料件進行研究,在滿足汽車外造型的同時,努力提升盲區監測系統的性能水平。
責任編輯人:CC
-
監測系統
+關注
關注
8文章
2817瀏覽量
82112 -
毫米波雷達
+關注
關注
107文章
1069瀏覽量
65034
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論