 機器視覺系統需要考慮的色彩串擾問題
機器視覺系統需要考慮的色彩串擾問題
在為你的產品開發最適合的機器視覺系統時,需要考慮很多因素,以下列出開發過程中需要考慮的一些問題:
顏色準確性 / 差異化
首先要考慮的是應用程序所需的顏色精度和差異程度。在某些應用中,機器視覺相機必須區分檢測到的顏色和目標值之間的距離。在這一領域,高精度機器視覺用戶需要比能夠接受較低精度和差異化水平的用戶更先進的相機。
如前所述,插值和低靈敏度是提高顏色精度和差異化水平的兩個主要障礙。插值可能導致顏色檢測的細微差異,因為它需要周圍像素的平均值來確定每個像素的顏色值。因此,當機器視覺系統試圖區分細微的顏色差異時,您可能不知道顏色的陰影實際上是不同的,或者它們只是拜耳插值中的變化。
色彩串擾
高度的色彩串擾會影響機器視覺相機產生的顏色的精度。高階串擾是由拜耳濾波器或二向色棱鏡涂層定義的紅、藍、綠通道的光譜響應之間相當大的重疊造成的。當通道之間有大量重疊時,某些顏色系列,尤其是黃或藍綠色系列,會有很大的不確定性。

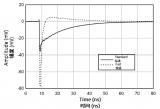
▲棱鏡相機中使用的二向色涂層比拜耳濾光片產生更陡的光譜曲線,以最大限度地減少由色彩串擾引起的不確定性。
當您的機器視覺系統需要區分這些顏色的不同色調時,這可能是非常有問題的。因此,在開發彩色機器視覺系統時,必須考慮哪些顏色系列對您的分析至關重要,以及機器視覺系統中可接受的顏色串擾水平。
光照水平和靈敏度
根據您的應用,您的機器視覺系統需要特定級別的感光度。拜耳、三線和棱鏡相機以不同的方式傳輸光,所以光的靈敏度是不同的。
例如,拜耳濾波器不僅由比光學棱鏡中使用的高級玻璃具有更低透射率的材料制成,而且鑲嵌方法也使得每個像素僅對三分之一的波長敏感。它落在上面了。根據給定像素的確切顏色,這可能會導致超過一半的光照在濾光片上,并且無法到達傳感器。
根據系統的亮度級別和可容忍的增益 / 噪聲級別,您可以根據應用程序選擇最合適的相機。
▲在拜耳相機中,每個像素上的濾波器阻擋了三分之二的光譜波長,大大減少了從場景中捕獲的實際光量。通過三個獨立的傳感器,棱鏡相機捕獲與每個像素相關的 100%的光。
白平衡和噪音
每一個使用顏色的機器視覺應用程序都需要白平衡。如果沒有根據系統使用的照明光譜調整清晰的基線,則無法準確捕獲真實的顏色值。根據所選機器視覺相機的類型,可以使用不同的白平衡方法。
例如,拜耳和三線相機只能通過在三個顏色通道中的兩個通道上添加增益(放大)來平衡白色,以匹配響應最高的通道。然而,增加增益不僅會使信號倍增,還會使圖像中的噪聲倍增。然后,由于整體低光條件所需的任何額外增益將添加到基線。如果需要超低噪聲,則可能需要通過增加可用光的數量或切換到不同的相機類型來解決此問題。
相比之下,棱鏡相機可以獨立控制每個傳感器,包括快門速度和增益。因此,您可以選擇使用快門速度進行白平衡 - 通過延長兩個通道的曝光時間來減少響應,或者縮短響應時間最長的兩個通道的曝光時間。如果暴露時間較長,噪聲可能會略微增加,但增加的幅度比增益小得多。在某些應用中,降噪可能是使用棱鏡相機技術的幾個原因之一。
▲彩色攝像機必須是白平衡的,以避免因照明類型和色溫而變色。典型的基于增益的白平衡會增加圖像噪聲。棱鏡相機中可用的基于曝光的方法對圖像噪聲的影響要小得多。
顏色偽像
顏色偽像是圖像缺陷 - 通常是錯誤著色的像素或圖案 - 由圖像的顏色信息的導出方式引起。使用估計或插值來計算顏色的相機最有可能表現出顏色偽影。
然而,即使是產生獨立的 R,G 和 B 值(非插值)的三線性相機,也會由于梯形失真效應,不平整表面或輕微的時序變化引起的空間偏移而產生顏色偽影。由于棱鏡相機具有三個獨立的傳感器并使用單個光學平面來捕獲圖像,因此使用棱鏡相機產生顏色偽影的風險非常低。
最常見的顏色工件類型是:
顏色混疊
顏色混疊是指當具有特定顏色的對象的線條或邊緣(例如,深藍色對角線)顯示不同的顏色時的情況,例如當在像素級別檢查圖像時沿其邊緣的紅色或黃色像素。
這個問題在拜耳相機中最常見,因為用于為每個像素分配 RGB 值的插值技術使用周圍像素的混合,這些像素可能具有與線或邊緣本身完全不同的顏色。
▲當插值沿著線和邊緣產生錯誤著色的像素時,會發生顏色混疊。
莫爾圖案
除了在捕獲單個邊緣或線時引起問題時,當圖像包含精細重復圖案時,大規模混疊可導致莫爾圖案的出現。雖然任何需要捕獲更高空間頻率的相機都會出現這種效果,但拜耳相機 - 再次因為插值技術 - 更容易出現這種情況。
▲具有重復顏色混疊的區域中的人造顏色圖案可以出現在拜耳圖像中。
對分辨率的影響
與單色系統相比,在確定彩色機器視覺系統所需的分辨率水平時需要特別小心。這是因為拜耳插值等色彩技術大大降低了相機的有效分辨率。雖然拜耳相機可能有 500 萬像素(5 百萬像素),但插值過程會“平均”許多小細節,使有效分辨率達到整個像素數的三分之一左右。
根據應用程序必須能夠檢測 / 分析的最小特征大小以及必須涵蓋的視野大小,有兩種可能的操作過程:
① 您可以選擇分辨率遠高于類似單色系統的拜耳相機。當然,這通常帶有更高的價格標簽,更昂貴的光學器件以及主機上更高的處理負荷。
② 您可以選擇具有與在單色系統上使用的基本分辨率大致相同的棱鏡相機。一個 320 萬像素的棱鏡相機實際上是一個 3×320 萬像素的攝像頭,帶有三個獨立的圖像傳感器,總計 9.6 百萬像素。因此,它可以產生 24 位,320 萬像素的輸出,而不會像拜耳相機那樣損失分辨率。如上所述,棱鏡相機比拜耳相機貴。但與使用 900 萬像素拜耳相機的所有相關成本相比,整體比較變得更加接近。
以上信息僅適用于區域掃描分辨率。在線掃描系統的情況下,三線性和棱鏡相機都不依賴于插值,因此這兩種技術的有效分辨率都沒有顯著降低。但是,線掃描相機章節中討論的一些問題可能會影響三線性相機區分小細節以及棱鏡相機的單個光學平面的能力。
色彩空間和色彩空間轉換
在開發機器視覺系統時,您需要確定哪種顏色空間最適合您的特定應用。確切的顏色空間取決于應用程序的用途以及如何分析顏色信息。
例如,簡單地在屏幕上顯示對象的應用程序自然會使用標準 RGB 顏色空間,因為這是所有監視器構造其像素顏色的方式。但是,如果您正在處理印刷材料,像 Adobe RGB 這樣的色彩空間可能是更好的選擇,因為它提供了更廣泛的顏色選擇,適合數字印刷。
其他顏色空間如 HSI(色調,飽和度,強度)和 CIE XYZ 或 CIE L * a * b *顏色空間使用數學坐標來描述顏色,以便某些應用程序更容易計算顏色匹配和顏色差異在程度和方向上。
在大多數應用程序中,您將使用主機上的算法和處理資源將來自攝像機的 RGB 數據轉換為最適合您應用的色彩空間。但是,在某些情況下,您可能希望相機在主機處理資源專注于其他任務時執行此轉換。對于這些情況,值得選擇具有內置色彩空間轉換功能的相機。
色彩增強和色彩優化
在某些情況下,您可能會發現有意改變顏色的準確性很有價值。如果是這樣,在開發機器視覺系統時,值得考慮色彩增強和優化功能。
例如,如果要檢測圖像中的特定偏差或將兩個對象彼此區分開來,有時可以幫助增強圖像中的特定顏色。例如,當圖像中的紅色增強時,可以更容易地區分血細胞和組織。
使用主機上的算法捕獲圖像后,可以增強圖像中的顏色。然而,后處理增強可能受到原始圖像的飽和度或對比度的限制。有些相機配備了色彩優化功能,允許用戶增強特定的主色或互補色,其真實價值高達 200%(2 倍)。系統構建者應該考慮這樣的功能是否可以為其應用程序增加價值,或者有助于將其與競爭系統區分開來。
▲顏色增強功能可以強調圖像中的特定顏色。
編輯:hfy
-
機器視覺
+關注
關注
162文章
4389瀏覽量
120445
發布評論請先 登錄
相關推薦
安森美機器視覺系統解決方案
機器視覺系統用途與實現及市場趨勢
機器視覺系統如何選擇圖像傳感器
機器視覺光源的選擇和應用有哪些
機器視覺的應用流程是如何實現的
機器視覺系統與運動控制系統的區別
機器視覺系統的工作原理和應用領域
機器視覺系統五個模塊介紹

機器視覺系統的組成部分

機器視覺系統和人工智能有什么區別
機器視覺系統中常用攝像機的分類






 工商網監
工商網監
評論