

8.2.殘余故障率的示例和局部單點故障度量評估.
8.2.1.總則
此示例演示了一種評估殘余故障率λRF、傳感器、單點故障率λSPF和單點故障度量MSPFM的本地化版本的方法,傳感器的傳感器。在本例中,將傳感器與另一個傳感器的值進行比較,其中兩個傳感器測量相同的物理量并具有已知的公差。傳感器的值,A_Master,由應用程序的一個特性使用。A_Checker,其他傳感器的值僅用于驗證傳感器A_Master的值。
這種監控在ISO26262-5:2018附件D中引用,作為“傳感器合理性檢查”或“輸入比較/投票”。
在這個示例中,只對傳感器A_Master的故障進行了分類和評估。傳感器A_檢查器的故障在這里沒有解決。
由于傳感器A_Master有一個安全機制定義,所有殘余的故障,有可能違反安全目標,而不受控制(即。違反安全目標的行為沒有得到防止)被歸類為殘余故障。單點故障率λSPF為(每定義)等于零。
8.2.2.傳感器A_Master的技術安全需求.
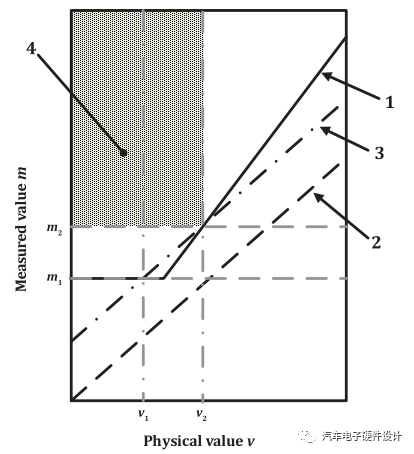
傳感器A_Master安全操作的邊界如圖11所示,并被認為是在這個示例中給出的(即。從安全目標的推導在這里沒有討論)。可以用下列術語表示:
即:
μSafRel,A,min=Max[CPVSG;v×(1+a)]
式中:
CPVSG:是一個常量;
μSafRel,A,min是傳感器A_Master的安全相關下界;
v:是要測量的物理值;
a:是一個常數。
當傳感器發生安全相關的故障時
mA,Master≥μSafRel,A,min
其中mA,Master是傳感器A_Master報告的值。
安全需求是在TSENA的最大故障處理時間間隔內檢測和控制傳感器A_Master的安全相關故障。
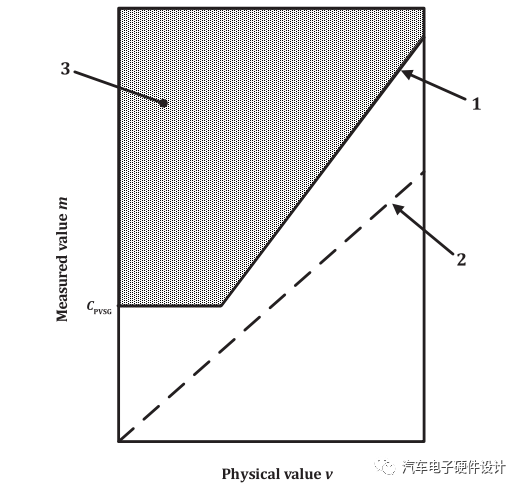
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2.具有零容忍的理想傳感器的返回值(作為參考)
3.有可能違反安全目標的故障
圖11-傳感器A_Master安全操作的邊界
在圖11中,x軸是要測量的實際物理值v,y軸是由傳感器A_Master報告的值mA,Master。虛線顯示理想傳感器的返回值(即。具有零公差的傳感器)作為參考。實線顯示μSafRel,A,min。如果傳感器A_Master報告的值mA,Master是在或以上的實線,違反安全目標可能發生。
8.2.3.安全機制的描述
要素的安全機制是傳感器A_Checker和由帶有嵌入式軟件的微控制器組成的監控硬件。該軟件定期比較兩個傳感器的值,周期小于最大故障檢測時間間隔TSENA。評估由以下偽代碼完成:
ΔA=mA,Master–mA,Checker
如果ΔA≥ΔMax那么失效是正確的
如果故障為真,則切換到安全狀態
式中:
mA,Master:是傳感器A_Master報告的值;
mA,Checker:是傳感器A_Checker報告的值;
ΔMax:是一個預定義的常數最大閾值,用作通過/不通過準則。
假定傳感器具有以下已知公差:
mA,Master=v±cA,Master
mA,Checker=v±cA,Checker
式中:
mA,Master:是傳感器A_Master報告的值;
mA,Checker:傳感器A_Checker報告的值;
cA,Master:是表示傳感器A_Master公差的常數;
cA,Checker:是表示傳感器A_Checker公差的常數;
v:是要測量的物理值。
選擇值ΔMax,以便檢測可能違反安全目標的傳感器A_Master的故障。為了防止錯誤的失效檢測,選擇ΔMax是考慮每個傳感器的公差和其他公差總結在cA,其他例如。不同時間取樣的影響:
ΔMax≥cA,Master+cA,Checker+cA,other
使用這種方法,不可探測的失效最壞的情況是:
μA,Master,wc=mA,Checker+ΔMax
=v+cA,Checker+ΔMax
式中:
μA,Master,wc:是最壞的情況檢測閾值。mA,Master傳感器未被檢測為故障的A_Master;
mA,Checker:是傳感器A_Checker報告的值;
ΔMax:是一個預定義的常數最大閾值,用作通過/不通過準則;
v:是要測量的物理值。
每個值mA,Master等于或高于μA,Master,WC被歸類為傳感器故障。
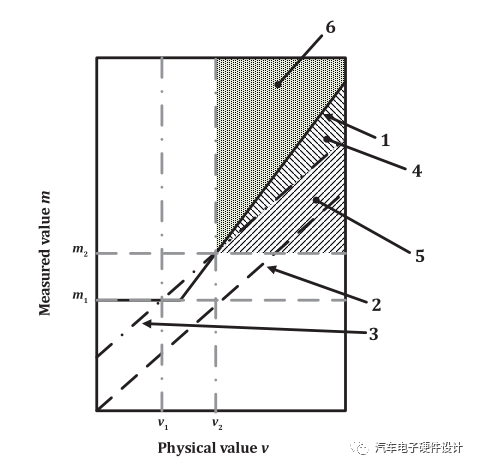
根據公差值,不同的檢測場景是可能的。有兩個示例如圖12和圖13所示。
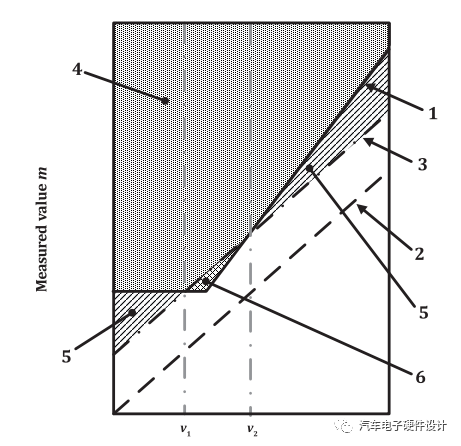
說明:
1,安全相關的下界μSafRel,A,MI的傳感器A_Master
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,可探測的雙點故障
5,檢測到的故障沒有可能違反安全目標
6,殘余故障
圖12-最壞情況檢測閾值(太高)的示例1
圖12中的箭頭表示三個區域。
區域5-“檢測到的故障沒有可能違反安全目標”是安全機制檢測到的故障,因為它們高于最壞情況檢測閾值μA,Master,WC,但單獨不會導致違反安全目標,因為它們低于安全相關的較低邊界μSafRel,A,min。
區域4-“可探測的雙點故障”是可能導致違反安全目標的故障,但被安全機制檢測和減輕。它們都高于最壞情況檢測閾值μA,Master,WC和安全相關的下邊界μSafRel,A,min。這些故障的雙點性質意味著它需要安全機制和傳感器的故障,以導致潛在的違反安全目標。
區域6-“殘余故障”沒有被安全機制檢測到,直接導致違反安全目標。區域μSafRel,A,min<μA,Master,WC表示v∈[v1,v2]低于最壞情況檢測閾值μA,Master,WC,但高于安全相關的下邊界μSafRel,A,min。
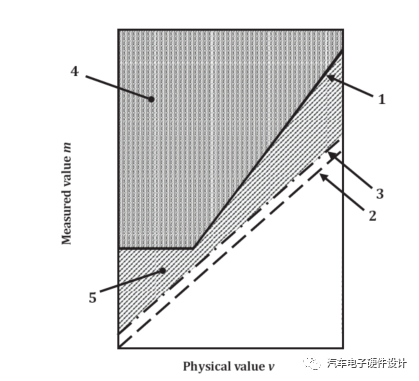
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,可探測的雙點故障
5,檢測到的故障沒有可能違反安全目標
圖13-最壞情況檢測閾值(MSPFM,傳感器=100%)的示例2
在圖13的情況下,最壞的情況檢測閾值μA,Master,WC總是小于安全相關的下邊界μSafRel,A,min。在這種情況下,殘余故障率為零,局部單點故障度量MSPFM,傳感器的傳感器等于100%。
8.2.4.圖12中描述的示例1的評估
8.2.4.1總則
在圖12的情況下,有條件時,最壞的情況檢測閾值μA,Master,WC是高于安全相關的下邊界μSafRel,A,min傳感器A_Master:
對于v∈[v1,v2]:μSafRel,A,min≤μA,Master,WC
為了確定殘余故障率λRF,傳感器和MSPFM,傳感器在這些條件下,需要進一步的分析。以下是這一分析的一個示例。在ISO26262-5:2018中,表D.1考慮了包括信號開關在內的傳感器的以下故障模式:
?超出范圍;
?偏移;
?卡滯;及
?振蕩。
在這個示例中,只評估恒定值m(在范圍內)下的卡滯。為了對傳感器和MSPFM的殘余故障率進行完整的評估,傳感器所有其他故障模式都需要評估。
對于分析,我們區分了傳感器的三種不同的卡滯故障場景(見圖14):
傳感器卡滯在值m>m2;
傳感器卡滯值m
傳感器卡在M1和M2之間的值m。
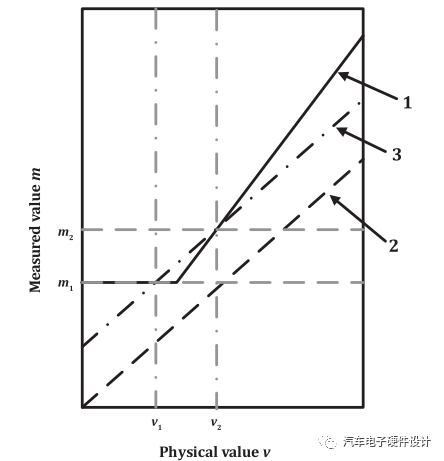
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
圖14-卡滯故障場景
傳感器在系統水平上的卡滯在故障的影響取決于當前的物理值v,例如。卡滯的m2故障有可能違反物理值v≤v2的安全目標。對于值v>v2,此故障不具有違反安全目標的潛力。在接下來的分析中,考慮檢測閾值以及物理值v及其概率分布,對故障作為殘余故障的概率pRF進行了評估。
8.2.4.2示例1:傳感器卡滯在值m>m2故障.
如果v≤v2,則該故障有可能違反安全目標(見圖15)。然而,傳感器偏差總是高于最壞情況檢測閾值μAMaster,WC,因此及時檢測和控制安全相關的傳感器故障。每個故障都是檢測到的雙點故障。在v≤v2的情況下,殘余故障的概率pRF為零。如果v>v2,則故障并不總是有可能違反安全目標(參見圖16)。如果故障有可能違反安全目標(圖16,區域6),它將超過最壞的情況檢測閾值,并及時檢測。圖16區域4和5的故障不能導致違反安全目標。
其中一些故障位于最壞情況檢測閾值之上,并被檢測到(圖16,區域4)。在v>v2的情況下,殘余故障的概率pRF為零。
如果v≤v2,卡滯在m>m2的故障具有違背安全目標的潛在可能,因而它們不能被視為安全故障。因所有的故障在其導致違背安全目標前,都得到了探測和控制,它們是可探測的雙點故障;因此,對于卡滯的m>m2故障,殘余故障的概率pRF_stuck@m2為零。
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,可探測的雙點故障
圖15-卡滯在的故障分類-在m>m2故障,與v≤v2
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,檢測到的故障沒有可能違反安全目標
5,沒有檢測到沒有違反安全目標的潛在故障
6,可探測的雙點故障
圖16-卡滯的故障分類-在m>m2故障,與v>v2

8.2.4.3示例2:傳感器卡滯在值m
圖17顯示了m
說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,不可探測的安全故障
5,安全故障,檢測到
圖17-卡滯在的故障分類-在m
8.2.4.4示例3:傳感器卡滯在值m∈[m1,m2]故障
違反安全目標的可能性和檢測m∈的卡滯在故障[m1,m2]取決于當前的物理值v(見圖18)。違反安全目標的風險取決于故障發生時v的當前值。在故障發生時,對v的三個不同間隔進行了評估,pRF_stuck@m∈[m1,m2]
?v
?v1≤v≤v2;及
?v>v2。
對于這些條件中的每一個,分別評估殘余故障的概率。殘余故障的最終概率是這三種概率的期望值:

說明:
1,安全相關的下界μSafRel,A,傳感器A_Master的最小值
2,具有零容忍的理想傳感器的返回值(作為參考)
3,最壞情況檢測閾值μA,Master,WC
4,可探測的雙點故障
5,不違反安全目標但仍不可探測的故障
6,殘余故障
圖18-在m∈[m1,m2]故障下的故障分類
根據v的電流值,故障可以檢測到雙點故障(區域4)、殘余故障(區域6)或不具有違反安全目標的潛力(區域5)。

pRF_stuck@m∈[m1,m2]=pRF_stuck@m∈[m1,m2],v
pRF_stuck@m∈[m1,m2],v1≤v2×pv1≤v2pRF_stuck@m∈[m1,m2],v>v2×pv>v2
式中:
pRF_stuck@m∈[m1,m2]:卡滯在值m傳感器故障的概率,與m∈[m1,m2],表現為殘余故障;
pRF_stuck@m∈[m1,m2],當故障發生時v
pv
pRF_stuck@m∈[m1,m2],v1≤v2是在故障發生時,如果v1≤v2,則在m∈[m1,m2]的情況下,卡滯在值m傳感器故障表現為殘余故障的概率;
pv1≤v≤v2:是v1≤v2在故障發生時的概率;
pRF_stuck@m∈[m1,m2],v>v2:當故障發生時,如果v>v2,則具有m∈[m1,m2]的卡滯在值m傳感器故障的概率表現為殘余故障;
pv>v2:是v>v2在故障發生時的時間點的概率;
pv
如果v
如果v>v2,則卡滯在故障不具有違反安全目標的潛力,但未被檢測到。從那以后
值v遲早介于v1和v2之間,pRF_stuck@m∈[m1,m2],v>v2=pRF_stuck@m∈[m1,m2],v1≤v2。
如果v1≤v≤v2,則殘余故障的概率pRF_stuck@m∈[m1,m2],v1≤v2不為零。
它準確地確定留在殘余斷層區域的概率足夠長,以導致潛在的違反安全目標并不簡單。它可以相關于參數,如:
?物理值v及其相應概率分布的動態行為,例如。溫度值更多地是靜態信號,而使用中的電動機的角度位置更多地是動態信號;
?值v在v∈內的概率分布[v1,v2];
?監控軟件的反應時間,例如。由于過濾時間。在示例中,具有ΔA≥ΔMax的單個事件足以檢測傳感器故障并切換到安全狀態。然而,實現錯誤計數器是一種常見的做法,因此為了評估傳感器故障并切換到安全狀態,需要多個事件。特別是錯誤計數器恢復,例如。一旦檢測到一個與安全無關的事件(在本示例中,這將對應于ΔA<ΔMax),則重置錯誤計數器會對監控軟件的檢測能力產生重大影響,從而大大降低它;以及
?測量的安全相關傳感器偏差的數量,以導致潛在的違反安全目標。此外,必須在兩個測量的安全相關傳感器偏差之間的有效測量的數量,以便安全目標不再被違反,可以引起興趣。
如果沒有每個影響參數的確切細節,則使用專家判斷和工程實踐是合法的(例如:使用未知概率分布的等分布)導出保守估計。
評估了@m>m2、pRF_stuck@m
可以計算傳感器在殘余故障下卡滯的概率pRF_stuck@m:
pRF,stuck@m=pRF,stuck@m
式中:
PM
PM1≤m2是卡滯在的概率-在m1≤m2≤m2故障;
PM>m2:是卡滯在的概率-在m>m2故障;
PM
8.2.4.5最終殘余故障率評估
如果對每個相關的故障模式FMI進行與上述相同的評估,則可以計算傳感器故障的總體概率pRF、傳感器本身表現為殘余故障:
pRF,Sensor=SpFM,i′pRF,FM,i
式中:
pFM,i:是故障模式FMI的概率;
PRF,FM,i:故障模式FMI表現為殘余故障的概率;
這個概率,殘余故障率,λRF,Sensor,可以評估為:
λRF,Sensor=pRF,Sensor×λRF,Sensor
導致一個MSPFM,Sensor的Z
8.2.4.6SPFMSensor的提升
降低傳感器殘余故障率的一種有效方法是降低ΔMax的值。在下列條件下,如果不顯著增加虛假檢測,就可以減少ΔMax:
?公差的概率分布可以表明,估計的最壞情況是非常不可能的。因此,誤報的概率足夠低,因此可以接受。
?重新設計系統可以提高容忍值。
請注意,在本例中只評估傳感器故障,而不是在殘余的傳感器路徑中發生的故障。共享硬件資源的故障可能導致兩個傳感器的故障,或者可能偽造兩個傳感器的值,例如。對微控制器的ADC進行了單獨的評估。此外,在ISO26262-9:2018第7條中給出的相關失效分析,已經完成。
責任編輯:xj
原文標題:殘余故障率的示例和局部單點故障度量評估ISO26262:2018-10-8.2
文章出處:【微信公眾號:汽車電子硬件設計】歡迎添加關注!文章轉載請注明出處。
-
傳感器
+關注
關注
2557文章
51946瀏覽量
760239 -
RF
+關注
關注
65文章
3132瀏覽量
168081 -
SPF接口
+關注
關注
0文章
4瀏覽量
8538
原文標題:殘余故障率的示例和局部單點故障度量評估ISO26262:2018-10-8.2
文章出處:【微信號:QCDZYJ,微信公眾號:汽車電子工程知識體系】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
PLC應用技巧,輕松解決PLC故障
無線紅外單點溫度傳感器解決方案

稱重傳感器故障檢測方法與策略探究

常見位移傳感器故障及解決方法
在測試過程中,如何防止電池擠壓試驗機的故障率?

FOC電機的故障檢測方法 FOC電機調試技巧大全

電力電容器運行故障率偏高的原因






 工商網監
工商網監

評論