

隨著高級駕駛輔助系統(Advanced Driver Assistance Systems, ADAS)在近些年的飛速發展,毫米波雷達在新車的裝配率日益增加。試想未來行駛在大街小巷的車輛都配備了毫米波雷達之后,雷達間的互相干擾將會成為一個越來越不容忽視的問題。
針對多雷達之間互相干擾的問題,加特蘭的Alps雷達SoC給用戶提供了有效的解決方案。在進一步展開前,讓我們看一下常見的雷達間的信號干擾是怎樣的:圖1是一個典型的FMCW雷達信號被干擾的示例。假如雷達在工作時接收到周圍其他雷達發出的chirp信號,且該干擾信號頻率和當前雷達的工作頻率相近,則干擾源將進入到雷達有效中頻帶寬(IF bandwidth)內。圖2顯示了干擾信號進入雷達有效中頻帶寬后情形,可見此時干擾信號對有效信號波形產生了很大的影響,容易導致有用目標信號無法被檢出,或者產生虛假目標點。

圖1
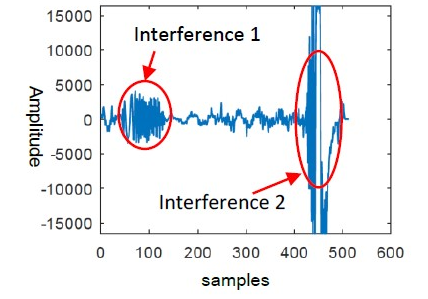
圖2
為了解決上述的干擾問題,Alps芯片中的baseband加速器集成了多種抗干擾功能,包括frequency hopping模式、chirp shifting模式、phase scrambling模式以及interference mitigation功能。
01Frequency hopping模式
該模式通過隨機數生成器—異或鏈來隨機改變frame中不同chirp的起始發射頻率。
frequency hopping模式下的信號如下圖3所示:
當異或鏈狀態為0時,不改變chirp的起始頻率,當異或鏈狀態為1時改變chirp的起始頻率;
當環境中存在同樣掃頻帶寬的干擾信號時,通過這樣的隨機改變chirp的起始頻率,其與干擾信號混頻產生的中頻信號將會在Alps的模擬帶寬之外。
該中頻信號將被濾波器過濾,故整個frame接收到的干擾信號能量將降低約一半(假設改變頻率的chirp數量和不改變頻率的chirp數量相同)。
而對于進入帶內的干擾信號,由于其在chirp間出現的頻率為隨機數,其能量將會被分攤到整個2D-FFT的頻譜內,因此不會聚集而產生假目標干擾。
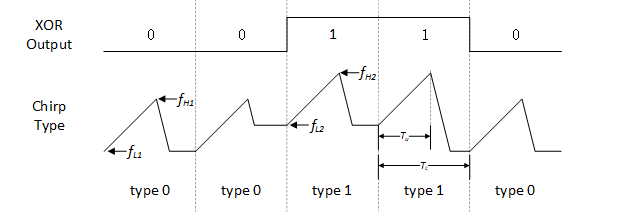
圖3
02Chirp shifting模式
與frequency hopping模式類似,該模式通過隨機數生成器—異或鏈來隨機改變frame中不同chirp的起始時間點。
當異或鏈狀態是1時,改變chirp的起始時間點,當狀態是0時,不改變chirp的起始時間點。
當環境中存在與雷達頻率相近的干擾源時,通過隨機改變chirp的起始時間點,其與干擾信號混頻產生的中頻信號也將會在Alps的模擬帶寬之外,從而達到和frequency hopping模式類似的效果。
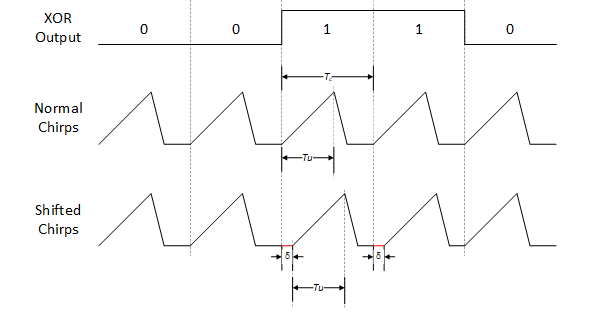
圖4
03Phase scrambling模式
該模式下,Alps通過隨機數生成器隨機改變frame中不同chirp的起始相位,如圖5所示。當干擾信號出現時,由于相位被隨機進行調制,其能量將會被分攤到整個2D-FFT的頻譜內,因此不會聚集而產生假目標干擾。

圖5
在以上三種模式下,Alps都需要對不同狀態的chirp做相位補償,從而減小chirp調制產生的相位誤差。若補償不當,則容易引起2D-FFT頻譜中出現沿速度維的假目標。Alps獨有的Baseband加速器將會自動對前兩種抗干擾模式做補償,而對于phase scrambling模式,用戶可以在雷達標定環節對180度相位做更精準的補償,從而獲得三種模式中最優的效果,即不產生速度維spur(目前Alps SDK中已經集成了標定指令,非常易于用戶在標定環節中調用)。
04 Interference mitigation模式
除了前面的三種抗干擾方式以外,Alps的baseband加速器還集成了一種干擾移除的算法。當雷達收集到時域信號波形后,會對信號的幅值變化率進行判斷。如圖6所示,若發現了信號中存在幅值變化率異常的采樣點,則會將這些信號識別為干擾。在該情況下,Alps將會對這些信號做移除處理,從而降低2D-FFT的噪底。
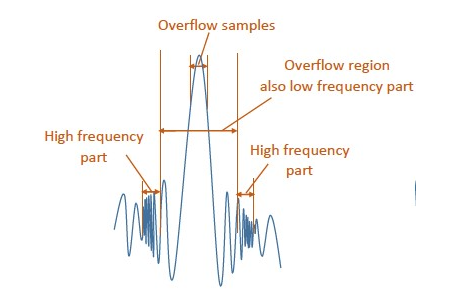
圖6
綜上所述,對于多雷達的互相干擾問題,Alps提供了多種手段來供用戶選擇和使用,并對干擾的抑制、干擾的去除都產生了積極的作用。
編輯:hfy
-
毫米波雷達
+關注
關注
107文章
1063瀏覽量
64754
發布評論請先 登錄
相關推薦
兩個測量通道信號之間互相干擾,如何解決?
315m遙控開關互相干擾
GPS與GPRS兩組模塊會互相干擾嗎?
示波器不隔離,通道之間信號會互相干擾么?
無人機超聲波互相干擾問題
請問cc2530 zigbee量產,編譯固件,怎么防止多套網絡之間互相干擾啊?
基于CAN現場總線的同步控制解決方案
汽車雷達傳感器的解決方案
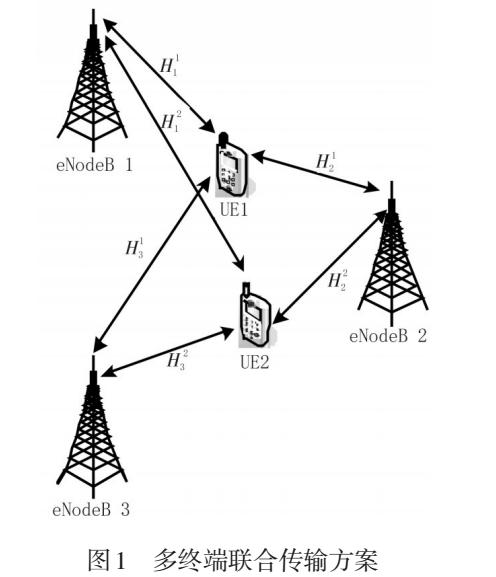
基于多終端聯合傳輸的干擾消除方案
相干雷達與偽相干雷達解析
華為新汽車專利獲授權,電動汽車磁場信號互相干擾問題得到解決
2.4g無線模塊和藍牙模塊會互相干擾嗎?






 工商網監
工商網監

評論