

來源:電子森林
舵機 在自動控制場合被廣泛應用。舵機的輸出力矩、轉動速度、命令更新頻率等標準了舵機的工作性能。在 全國大學生智能車競賽中 ,大多數車模作品的方向控制都使用了舵機控制。在賽道上運行的車模速度,在 控制參數設置 合理的情況下,最高速度取決于舵機的響應速度。
通常,舵機的運行取決于 舵機特有的脈沖指令高電平時間寬度 ,而與脈沖指令的頻率無關。所以控制舵機的脈沖波形與控制電機運行的PWM波形的作用是不同的。
舵機內部具有驅動電路板,保證輸出角度與脈沖指令的寬度之間呈現比例關系。舵機輸出轉角速度則取決于舵機本身內部機械結構、電機的性能、工作電壓等各種因素。
由于舵機的轉速與指令無關,所以從本質上講, 舵機不是一個線性模型 。當舵機轉動角度越大,它的動態非線性就越明顯。
01舵機轉動速度與工作電壓
舵機的轉動速度越快,在智能車競賽中車模控制性能就會越好。正好手邊測試了一個 角度編碼器 ST-3806-15-RS ,它有每周15bit的角度分辨率。這款角度編碼器用于一款 雙軸機械臂 的控制中。現在正好可以用它來測試舵機轉動的角度、角速度。依次來分析舵機工作電壓與執行速度之間的關系。
1.測量方法
選擇S-D5舵機,使用橡膠套管將舵機輸出軸與角度編碼器連接在一起。使用機械平臺將它們固定、共軸。使用 角度編碼器 ST-3806-15-RS 測試電路模塊來讀取角度傳感器的數值,控制多級的轉動。
▲ 使用角度傳感器測量舵機旋轉速度
給定舵機脈沖指令,從1000us突變到2000us。舵機順時針旋轉60°。在這個過程中,采集角度的速率為3ms,讀取200個。得到的角度曲線如下:
取角度上升線性部分(距離最下,最上各5%的余量),進行線性擬合。再計算擬合直線與最小角度、最大角度對應的時間交點。使用這個交點之間的時間差作為舵機的執行時間。執行時間的倒數可以反映舵機輸出角速度。
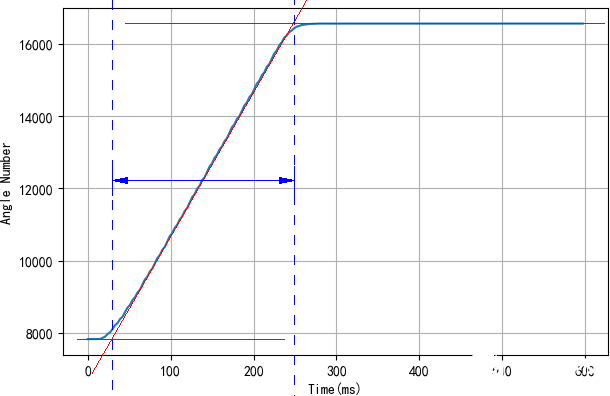
▲ 測量旋轉角度曲線對應執行時間
2.測量數據
下面使用數控直流電源調節舵機工作電壓,從4.0V ~ 6V,分成20個工作電壓點。在每個工作電壓點,測量舵機的轉動曲線,使用上面的方法,獲得舵機的轉動時間。
▲ 隨著工作電壓的增加,舵機轉動角度的曲線的變化
下圖給出了舵機轉動時間與工作電壓測量的數據曲線。工作電壓越高,舵機執行時間就越短。
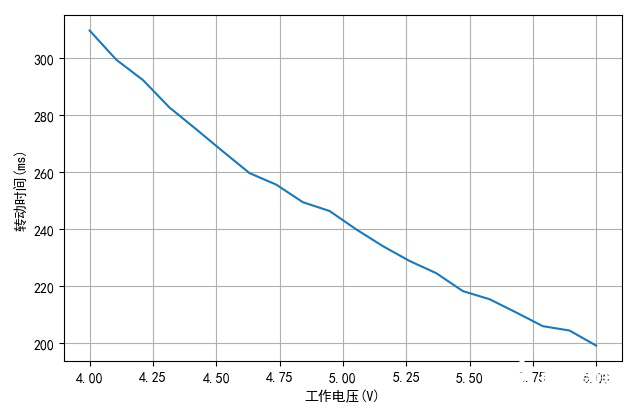
▲ 工作電壓與轉動時間之間的關系
將上述時間取倒數(1000/time(ms)),可以獲得下面的舵機轉動相對速度與工作電壓之間的關系。大體可以看到舵機執行速度與工作電壓成正比。
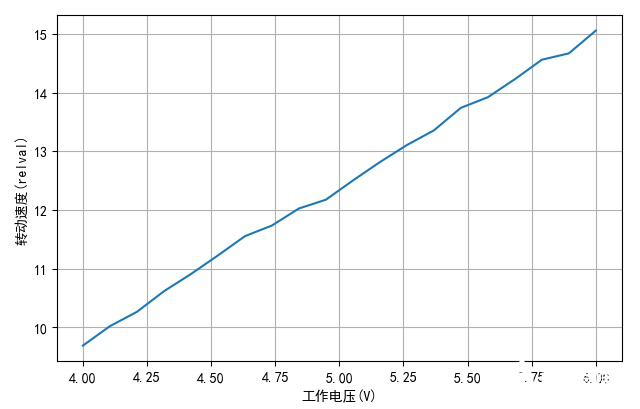
▲ 工作電壓與舵機轉動速度之間的關系
02分析結論
通過前面的分析可以看出:
為了提高多級的執行速度,可以在舵機允許的工作電壓范圍內盡可能提高舵機的工作電壓;
為了避免高的工作電壓對舵機內部的電路過壓的影響,需要在舵機工作電源進行必要的限幅和穩壓。
在舵機工作過程中,如果頻繁的轉動,需要考慮到舵機散熱;
▲ 舵機指令在1000us在2000us之間切換變化
此外,還可以通過在舵機輸出軸,增加執行懸臂的長度,來通過機械放大提高舵機控制車模前輪轉向的速度。
-
電壓
+關注
關注
45文章
5681瀏覽量
117070 -
舵機
+關注
關注
17文章
292瀏覽量
41577
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論