") 智能穿戴背后的秘密
智能穿戴背后的秘密
你使用過智能手環(huán)嗎?作為穿戴設備中最普及的硬件,小小的手環(huán)里功能強大,可以精準檢測出不同運動模式下消耗的卡路里,監(jiān)測并判斷睡眠狀態(tài)和睡眠質(zhì)量,從而便利和提升生活質(zhì)量。那么在這些炫酷的功能背后究竟隱藏了什么秘密呢?
看似小小的手環(huán),里面集成了眾多傳感器,比如高精度6軸MEMS運動傳感器(3軸加速度傳感器+3軸陀螺儀),氣壓傳感器,光學心率傳感器等等。其中加速度計測量的是加速度,陀螺儀測量的是角速度,氣壓計測量的是高度變化。
假如想要計算熱量消耗,在計步的場景下一般有幾種典型的方法,一種是首先基于MEMS慣性傳感器計算走/跑到步數(shù),然后根據(jù)步長(用戶輸入,或根據(jù)用戶信息,如身高,性別)和步數(shù)來計算,這并不能反映用戶實際行走的環(huán)境對熱量消耗的影響。更加精確的辦法是用氣壓傳感器的數(shù)據(jù)與慣性傳感器進行融合,氣壓計記錄每個動作的高度變化,形成獨特的“動作指紋”并補償進算法。那么在設計算法的過程中會考慮什么呢?如何保證其準確率和可靠性?
多傳感器融合校準數(shù)據(jù)
游泳運動越來越流行,有些穿戴設備甚至還有游泳姿態(tài)的識別功能。在游泳的過程中,劃水的手臂不僅有姿態(tài)的變化,還有各種旋轉(zhuǎn)動作,那么要實現(xiàn)泳姿識別,就必須要實現(xiàn)加速度計和陀螺儀的協(xié)調(diào)和融合。
然而加速度計和陀螺儀的數(shù)據(jù)都具有不確定性。陀螺儀具精確但有零點漂移特性,其測量誤差會隨著時間的累加而不斷的累積,從而影響測量精度。因此,短時間測量應信任陀螺儀。由于加速度計測量的是慣性力,這個力可以由重力引起(理想情況只受重力影響),但也可能由設備的加速度(運動)引起。因此對震動和噪聲的敏感,混疊額外的高頻振動量干擾,但是漂移小。因此,長時間測量應信任加速度計。所以單一的傳感器測量難以得到精確的姿態(tài)角度。一般采用卡爾曼濾波器來做多傳感器信號融合,使它們分別補償對方的噪音和漂移誤差來實現(xiàn)準確的度量。
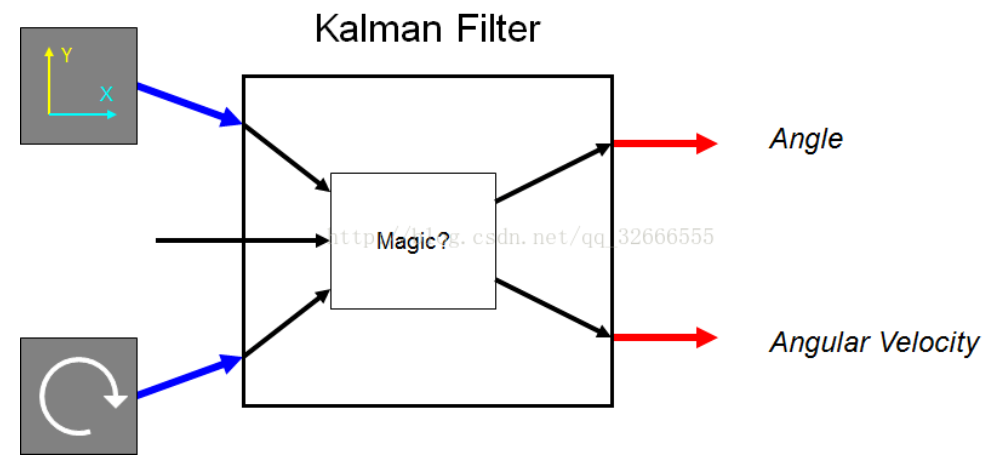
Kalman Filter
特征工程及算法實施
得到了準確的數(shù)據(jù)之后,我們首先要做特征的構(gòu)造和選擇,其本質(zhì)是讓人為選擇的特征對樣本進行劃分之后,讓其混亂程度(熵)減小,純度變高,以便于做動作的區(qū)分與識別。特征提取和選擇作為“內(nèi)功心法”,考驗的是工程師對數(shù)據(jù)的“insight”,一些情況下可以用直覺的方式,例如要檢測一個人是否從高空墜落,我們可以判斷他保持失重的時間。但有情景是較為復雜的,例如從腳手架上有碰撞的跌落,會遇到需要多個特征融合或者關(guān)鍵特征難以提取的情況,我們一般是數(shù)據(jù)驅(qū)動的方式解決,比如用機器學習的方式把處理好的數(shù)據(jù)放入決策樹中進行訓練進而得出能夠分類動作的模型。下面給大家介紹一個實際的項目案例。
iSite項目中 的Smart Helmet
工地施工場景
iSite項目的應用領域是智能工地,價值定位是用智能硬件提升施工工地安全和生產(chǎn)效率,其中就包括檢測工人人身安全這樣critical的 問題。智能頭盔作為硬件載體,集成了博世BHI160,內(nèi)置三軸加速度計和三軸陀螺儀以用于動作識別。由AE-CN負責智能頭盔的算法開發(fā)的工作,實現(xiàn)了工地復雜場景下的連續(xù)跌落檢測,脫戴帽狀態(tài)檢測,異常靜止檢測等功能。
通過采集不同動作的數(shù)據(jù),進而預處理,做特征提取和融合,數(shù)據(jù)增強,模型訓練,模型剪枝,并測試驗證之后,把模型部署在BMI160內(nèi)置的MCU里。這樣在實際工況下實時采集到的數(shù)據(jù)處理過后利用已經(jīng)訓練好的決策樹分類器進行分類識別,進行實時的動作識別,我們在測試集和實際測試中均達到了98%的準確率。
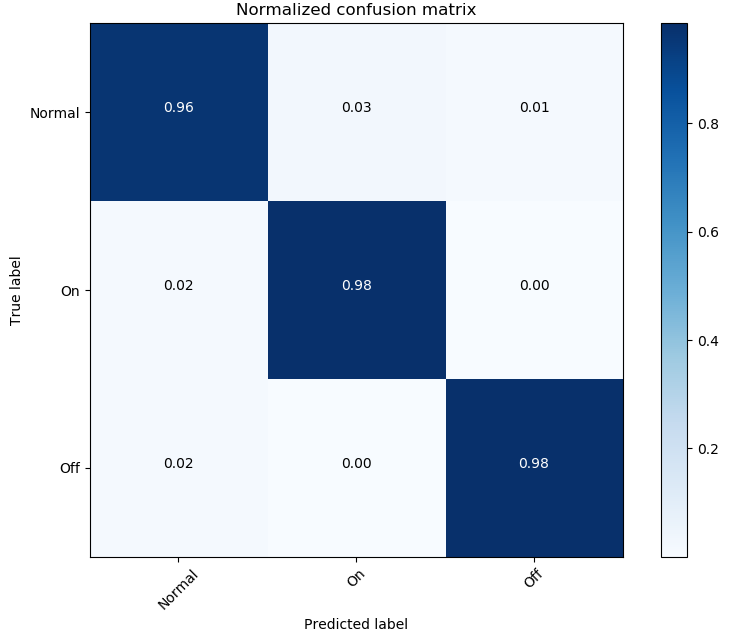
Figure 5. Normalized Confusion Matrix
在未來,機器學習等復雜的算法正移向邊緣嵌入式設備中,結(jié)合多傳感器同步融合為人們提供實時的智能推斷,推薦和事件檢測。
-
智能穿戴
+關(guān)注
關(guān)注
2文章
403瀏覽量
39651 -
智能穿戴設備
+關(guān)注
關(guān)注
0文章
112瀏覽量
16083
原文標題:揭秘智能穿戴實現(xiàn)背后的算法
文章出處:【微信號:AE_China_10,微信公眾號:博世汽車電子事業(yè)部】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
了解TYPE-C接口背后的秘密
拼價格斷送未來,智能穿戴的明天在哪里?
SKYLAB詳解智能穿戴GPS模塊及智能穿戴設備GPS模塊選型要點
小尺寸、超低功耗的智能穿戴定位解決方案
沒有物聯(lián)網(wǎng)卡,智能穿戴設備會是怎樣的?
智能穿戴企業(yè)如何在激烈的競爭中脫穎而出?
CES可穿戴創(chuàng)新產(chǎn)品超長電池續(xù)航揭秘
世界首款K波段DAC背后的秘密
智能穿戴市場打造細分化市場 熱銷背后存隱患
廣汽豐田工廠初體驗:解讀“零缺陷”背后的秘密
TCL X11領曜QD-Mini LED智屏的背后究竟有哪些秘密
捕捉未來,3D影像背后的數(shù)字秘密
秘密背后的秘密-高速PCB的層疊確認時,工廠為何不寫銅箔類型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論