 CCD的結構參數及動態范圍
CCD的結構參數及動態范圍
本文介紹了CCD的結構、工作參數和外部信號處理電路如何影響CCD成像硬件可以捕獲的最大亮度變化的。
我們已經了解了動態范圍的一般概念,也知道了動態范圍作為成像系統中的性能規格。在本文中,我們將探討半導體和電路級的CCD動態范圍。我們將考慮以下問題:是什么決定了CCD及其相關信號處理電路所能記錄的亮度范圍?
最大信號和本底噪聲
在CCD中,輸入信號是電磁輻射,輸出信號是電荷包,其數量與該電磁輻射的強度相對應。
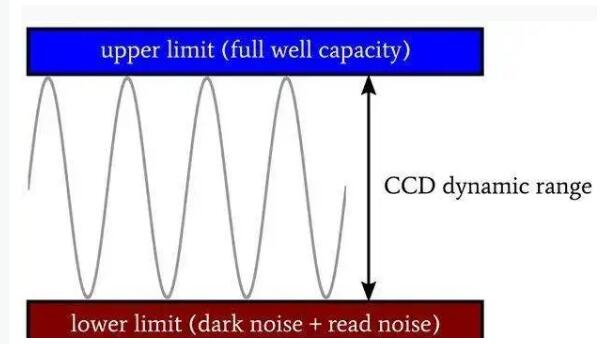
輸入信號的動態范圍本質上是無限的:亮度可以從零變化(這意味著完全沒有光子)到宇宙中最亮的物體產生的強度。但是,輸出信號的動態范圍是有限的。
由于噪聲,零亮度不會產生零電荷。由于具有完整的阱容量,亮度增加到某個點以上將不再產生相應的電荷增加。因此,CCD的動態范圍是滿阱容量與本底噪聲的比值,即像素可以產生的最大輸出信號電平除以即使像素沒有入射光也將產生的信號電平。
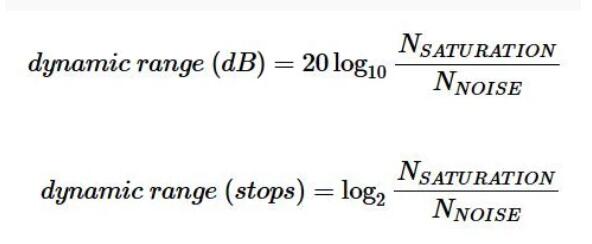
如果你一直在關注圖像傳感器技術,就會知道CCD中的主要噪聲源是暗噪聲,光子噪聲和讀取噪聲。但是,在計算動態范圍時,我們僅考慮暗噪聲和讀取噪聲。我發現有兩個原因:首先,光子噪聲不是CCD或隨附的讀出電路的特性-它是光的本質所固有的,并且在一個系統之間不存在差異。其次,光子噪聲不會影響最小的輸出信號電平,因為入射光為零時,光子噪聲也為零。這使我們得出以下公式:
其中NSATURATION是滿阱容量(即,輸出信號飽和的電子數),而NNOISE是暗噪聲和以電子RMS表示的讀取噪聲之和。如果你更喜歡使用分貝或止損而不是普通比率,則我們具有以下公式:
CCD的滿阱容量
影響滿阱容量的重要因素是像素的面積,或者如果只有一部分像素對光敏感的話,則是光電二極管的面積。較大的光敏元件對應于其中可以集成電荷的較大的硅部分。因此,我們可以通過增加像素大小來擴展動態范圍。鑒于在不改變傳感器的總面積的情況下,這樣做會導致分辨率降低,因此,如果要增加動態范圍并保持分辨率,則需要更大的傳感器。
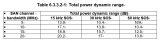
物理上較大的光電二極管為光生自由電子的積累提供了更多空間。當前市場上的CCD在滿阱容量上具有廣泛的變化。例如,牛津儀器的器件范圍從25,000個電子(像素面積=100μm2,動態范圍=64dB)到510,000個電子(像素面積=676μm2,動態范圍=94dB)。
有效滿阱容量
工作條件可能會影響滿阱容量。例如,ONSemi公司的KAI-2020CCD的滿阱容量為20,000電子或40,000電子。實際的物理容量接近40,000電子,但是輸出放大器在40MHz的全讀出速度下無法處理40,000電子。因此,在計算動態范圍時,我們需要考慮有效的滿阱容量,而不是僅與像素的物理特性相對應的電子容量。同樣,KAI-2020光電二極管的有效滿阱容量取決于所施加的基板電壓。較低的基板電壓會產生較大的滿阱容量(因此會產生較大的動態范圍),但同時也會使傳感器更容易出現光暈。
動態范圍和模數轉換
盡管CCD的動態范圍取決于滿阱容量和噪聲,但我們必須記住,相機必須先對CCD的數據進行數字化處理,然后再對其進行處理。CCD信號通過ADC到達系統的其余部分,因此,我們需要確保模數轉換器提供足夠的動態范圍。
如果你花錢買了具有90dB動態范圍的高性能CCD,然后將其與8位ADC配對,則圖像數據的最終動態范圍就是ADC的動態范圍,只有8位分辨率,實際上約為48dB。你損失了42dB。幸運的是,從ADC獲得足夠的動態范圍通常不是主要挑戰。許多CCD的動態范圍約為60–70dB,你可以通過12位ADC分辨率來保持這種動態范圍性能。ADI公司和德州儀器(TI)銷售高度集成的CCD信號處理器,支持12位A/D轉換。
結論
我們已經看到,動態范圍是由CCD的滿阱容量和噪聲特性決定的。但是,需要記住的一點是,動態范圍并不總是最關鍵的性能指標。動態范圍可幫助相機捕捉高對比度場景,但有時候,我們可能對阱容量或低噪聲更感興趣,而不是去追求最大的動態范圍而需要兼顧噪聲性能和滿阱容量。
-
CCD
+關注
關注
32文章
883瀏覽量
142354
發布評論請先 登錄
相關推薦
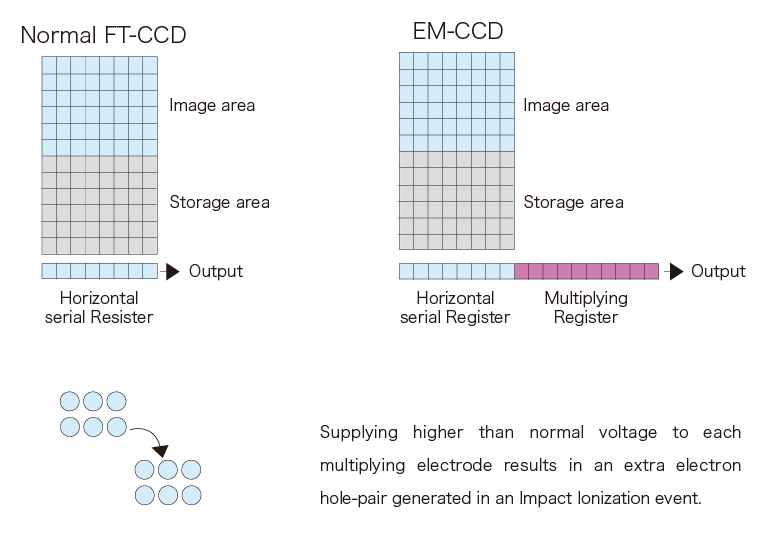
電子倍增CCD圖像傳感器(EM-CCD)
UPS電源“十全十測”之8:UPS動態電壓瞬變范圍
PCM1798的動態范圍,失真,分離度分別是多少?
什么是無雜散動態范圍 (SFDR)?為什么 SFDR 很重要?

請問TL971能支持的輸入動態范圍是多少?
頻譜分析儀的動態范圍
cmos和ccd相機的區別——結構區別
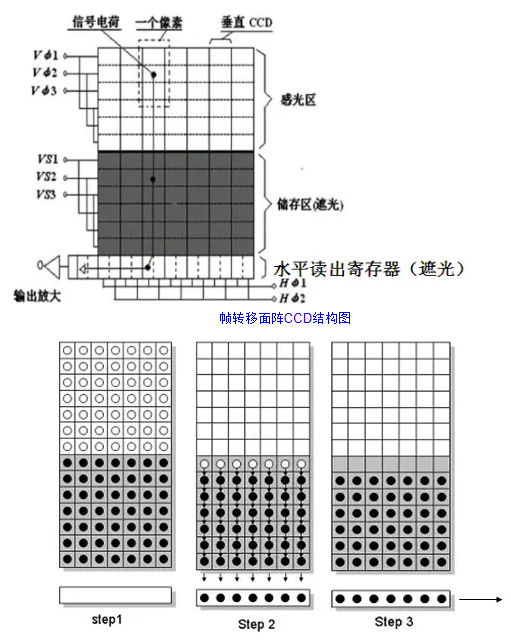
面陣CCD結構圖及工作過程分析
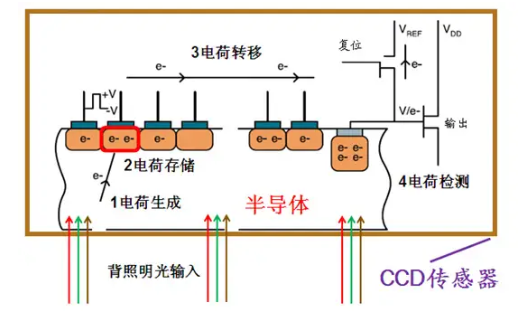
CCD傳感器的基本原理及過程示意圖
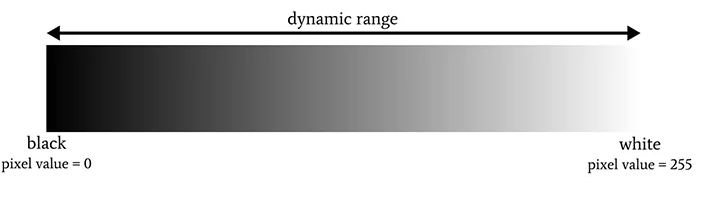
了解成像系統中的動態范圍






 工商網監
工商網監
評論