") 飛行時間傳感器的距離確定方法
飛行時間傳感器的距離確定方法
飛行時間傳感器測量物體穿過介質(zhì)傳播所需的時間。通常,是在發(fā)出波脈沖,從對象反射到返回到ToF傳感器之間經(jīng)過的時間的度量。
目前,立體成像,結(jié)構(gòu)化的光投影和飛行時間(或ToF)這三項領(lǐng)先的3D成像技術(shù)正在爭奪手機和汽車中的市場空間。
通過3D成像技術(shù),可以實現(xiàn)行人檢測,基于面部特征對用戶進行身份驗證,檢測手的移動并提供SLAM(同時定位和映射)算法等應(yīng)用。
今天,我們主要來了解飛行時間傳感器。
一、什么是飛行時間傳感器?
飛行時間傳感器測量物體穿過介質(zhì)傳播所需的時間。通常,是在發(fā)出波脈沖,從對象反射到返回到ToF傳感器之間經(jīng)過的時間的度量。
而飛行時間相機是一種利用ToF測量來確定相機與物體或環(huán)境之間的距離,創(chuàng)建由單獨測量的點生成的圖像的設(shè)備。
ToF相機的應(yīng)用包括基于激光的無掃描器LiDAR成像系統(tǒng),運動感測和跟蹤,用于機器視覺和自動駕駛的物體檢測,地形圖等等。
二、飛行時間傳感器確定距離的方法
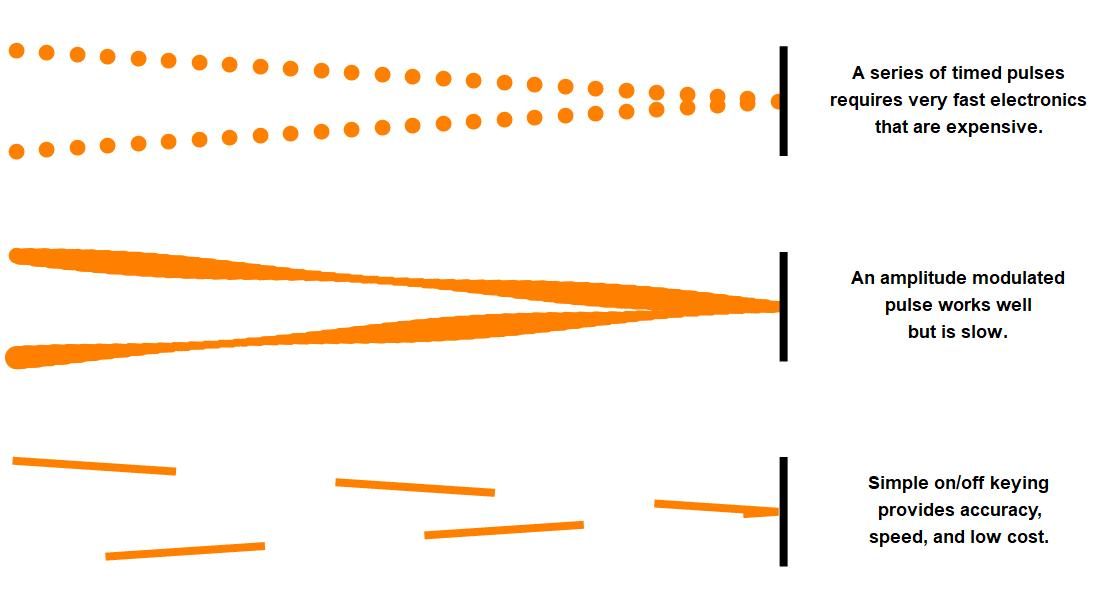
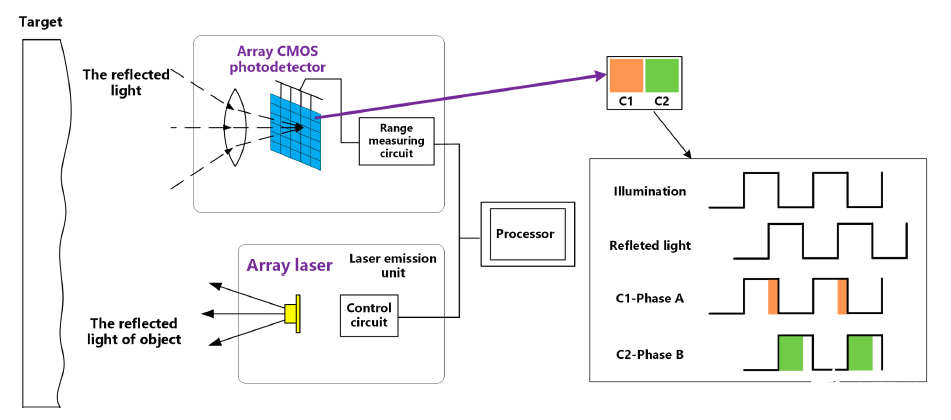
使用飛行時間來確定距離的方法有以下3種:
①、在圖像的頂部,您可以看到第一種方法,該方法是發(fā)送脈沖并測量時間間隔,直到它們在反射后返回為止。
②、圖像的中間部分顯示了第二種方法,其中您可以調(diào)制光源的振幅并記錄反射波的相移。
③、圖像的底部表示第三種方法,該方法傳輸占空比為50%的方波,并記錄在特定間隔內(nèi)到達的返回光量。
利用飛行時間確定距離的方法
但在實際應(yīng)用中,確定距離的方法遠沒有這么簡單。比如,當飛行時間傳感器應(yīng)用在相機中,實現(xiàn)毫米級精密ToF相機時,以上利用飛行時間確定距離的方法就不太適用了,而是需要經(jīng)過改進。
光波和無線電波的傳播速度接近300,000,000,000mm/s,對于波傳播1mm,光波和無線電波的傳播速度約為3.3ps(返回波速為3.3ps)。這意味著,如果您想要一個可以對房間內(nèi)所有物體成像的設(shè)備,并且想要的分辨率約為1毫米,則定時電子設(shè)備將需要皮秒級的分辨率,轉(zhuǎn)化為數(shù)百GHz的時鐘速度。
設(shè)計在這些頻率下工作的電子電路既不容易,也不經(jīng)濟,因此,如果設(shè)計人員希望將這些設(shè)備帶入消費市場,那么他們必須想出一種在較低頻率下工作的方法。
存在兩種常見的方法,可以在合理的GHz頻率下實現(xiàn)毫米級精度:
將正弦調(diào)制波的相移與距離相關(guān);
使用50%占空比方波的相移和差分電壓來確定距離。
在以下各節(jié)中,我們將更詳細地介紹這兩種方法。
三、改進飛行時間傳感器確定距離的方法
通過調(diào)幅波的相移確定距離
假設(shè)您要繪制最大長度為15m的小型辦公室或大型客廳。要確定適合該長度的工作頻率,請使用?=λ·&?FC=λ?F其中c是光速(c=3x108m/s),λ是一個波長(λ=15m),?是頻率。在此示例中,?=20MHz,這是一個相對容易使用的頻率。
當亮光的輸出由20MHz正弦信號調(diào)制時,一切就開始了。光波最終將到達物體或墻壁,并且將反射和反轉(zhuǎn)方向。原始調(diào)制光的調(diào)光器版本將返回接收器。除非對象恰好是15米的整數(shù)倍,否則相位將偏移一定量。
相移可用于計算波傳播的距離。
如果您可以準確地測量相角,則可以準確地確定反射物體與傳感器/接收器的距離。
如何測量正弦波的相角?
那么,如何快速測量正弦波的相位角?這涉及在四個等距的點(即90°或1/4λ的間隔)處測量接收信號的幅度。
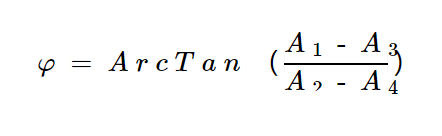
我試圖在下面說明測量值和相角之間的關(guān)系。A1和A3之間的差與A2和A4之間的差之比等于相角的切線。ArcTan實際上是兩個參數(shù)的反正切函數(shù),該函數(shù)映射適當?shù)南笙蓿2=A4且A1>A3或A3>A1分別定義為0°或180°。
下面圖像說明了變量A1,A2,A3和A4的差如何擬合到單位圓上。
在上面的插圖中,圖形的最左側(cè)有兩條垂直數(shù)字線,顯示了減去A1和A3(表示為深黃色)以及A2和A4(表示為藍色)的結(jié)果。測量值在中間的正弦曲線圖中顯示為垂直線。
請注意,此圖形未考慮反射(這將使所有物體有效地移動180°)。
確定給定距離的工作頻率:
回到我們的示例,到目標的距離由以下公式確定:
其中c是光速,phi(φ)是相位角(以弧度為單位),?是調(diào)制頻率。
測量光子的實際飛行時間需要333GHz電子設(shè)備。此方法最大需要4倍的調(diào)制頻率,在這種情況下為4x20MHz=80MHz。這顯著減少了資源。但是,您會很高興知道一些聰明的工程師找到了一種進一步降低最大頻率的方法。
通過帶電電容器的差分電壓測量確定相移
下一個測量情況涉及頻閃光源和每個像素有兩個電容器的CMOS成像傳感器。
時鐘源產(chǎn)生占空比為50%的方波,該方波控制明亮的選通光源以及與每個像素內(nèi)部的電荷存儲電容器的連接。
下圖顯示了這種系統(tǒng)的示例:
“光子混合器設(shè)備固態(tài)陣列LiDARS的快速校準方法”中的圖像顯示了一個CMOS像素,該像素帶有兩個交替連接的電荷存儲電容器,以記錄入射光。
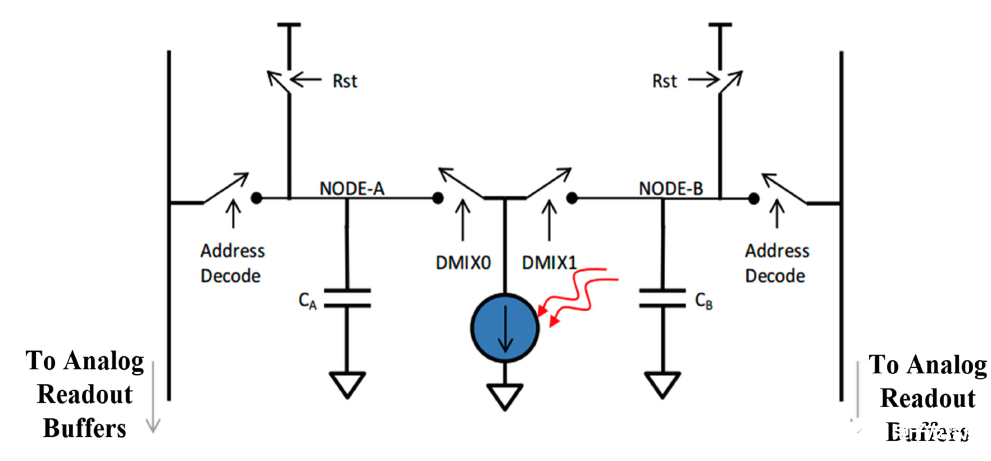
光線離開光源,反射離開物體,然后撞擊像素,該像素將作為電荷記錄在上面所示的電容器CA或CB中。電容器使用相同的時鐘源以與照明源相同的頻率交替連接至像素。
這種巧妙的安排意味著電容器中的差分電荷直接與相位偏移有關(guān)。相位由波長以及到目標和目標的距離確定。
來自“光子混合器設(shè)備固態(tài)陣列LiDARS的快速校準方法”的圖像
可以照亮被攝對象充電容器所需的次數(shù)。只要距離恒定,電荷比例將保持不變。
那么這種方法的效果如何呢?
提供給AAC的傳感器與隨附的軟件結(jié)合使用,能夠記錄高達45fps的圖像。在較低的刷新率下,系統(tǒng)可以輕松成像襯衫上的皺紋。
上圖繪制了從Pmd的picoflexx相機捕獲的每個像素的(x,y,z)頂點位置。
僅深度數(shù)據(jù)本身很難可視化。因此,深度圖像通常與照片結(jié)合在一起,或使用假色顯示,以使場景更容易可視化。
上圖顯示出,低分辨率圖像的偽彩色深度覆蓋層使解釋場景更加容易。使用Pmd的RoyalViewer軟件和CamBoardpicoflexx3D開發(fā)套件捕獲的goober作者的圖像。
飛行時間傳感器可用于多種應(yīng)用中,包括將巧妙的物理技術(shù)與工程技術(shù)結(jié)合起來創(chuàng)建環(huán)境的3D地圖。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51193瀏覽量
754410
發(fā)布評論請先 登錄
相關(guān)推薦
重磅新品 | 美芯晟發(fā)布全集成直接飛行時間(dToF)傳感器MT3801

GUD8礦用本安性磁性傳感器檢測距離怎樣確定
飛行時間和激光雷達 - 光學前端設(shè)計應(yīng)用說明

艾邁斯歐司朗發(fā)布新一代單區(qū)直接飛行時間(dToF)傳感器TMF8806
激光測距傳感器輸出什么信號
OPT8320 3D飛行時間傳感器(短)數(shù)據(jù)表
OPT8241 3D飛行時間傳感器數(shù)據(jù)表
OPT9221飛行時間控制器數(shù)據(jù)表
解讀工業(yè)機器人避障常用的視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器

貿(mào)澤開售適用于存在檢測和系統(tǒng)激活應(yīng)用的STMicroelectronics VL53L4ED飛行時間接近傳感器
意法半導(dǎo)體宣布推出一款全能型、直接式飛行時間3D激光雷達模組
意法半導(dǎo)體的多區(qū)飛行時間(ToF)傳感器系列介紹

多區(qū)飛行時間(ToF)傳感器的特點

飛行時間傳感器:技術(shù)原理與多元應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論