") PID操控的原理和特征說明
PID操控的原理和特征說明
PID即是份額微積分調(diào)度,具體你可以參照主動(dòng)操控課程里有具體介紹!正效果與反效果在溫控里即是當(dāng)正效果時(shí)是加熱,反效果是制冷操控。
PID操控簡(jiǎn)介
如今工業(yè)主動(dòng)化水平已變成衡量各行各業(yè)現(xiàn)代化水平的一個(gè)首要象征。一同,操控理論的翻開也閱歷了古典操控理論、現(xiàn)代操控理論和智能操控理論三個(gè)期間。智能操控的典型實(shí)例是含糊全主動(dòng)洗衣機(jī)等。主動(dòng)操控體系可分為開環(huán)操控體系和閉環(huán)操控體系。一個(gè)控操控體系包含操控器﹑傳感器﹑變送器﹑施行安排﹑輸入輸出接口。操控器的輸出經(jīng)過輸出接口﹑施行安排﹐加到被控體系上﹔操控體系的被控量﹐經(jīng)過傳感器﹐變送器﹐經(jīng)過輸入接口送到操控器。紛歧樣的操控體系﹐其傳感器﹑變送器﹑施行安排是紛歧樣的。比方壓力操控體系要選用壓力傳感器。電加熱操控體系的傳感器是溫度傳感器。如今,PID操控及其操控器或智能PID操控器(外表)現(xiàn)已許多,商品已在工程實(shí)習(xí)中得到了廣泛的運(yùn)用,有林林總總的PID操控器商品,各大公司均開發(fā)了具有PID參數(shù)自整定功用的智能調(diào)度器(intelligentregulator),其間PID操控器參數(shù)的主動(dòng)調(diào)整是經(jīng)過智能化調(diào)整或自校對(duì)、自習(xí)氣算法來完畢。有運(yùn)用PID操控完畢的壓力、溫度、流量、液位操控器,能完畢PID操控功用的可編程操控器(plc),還有可完畢PID操控的PC體系等等。
1、開環(huán)操控體系
開環(huán)操控體系(open-loopcontrolsystem)是指被控方針的輸出(被操控量)對(duì)操控器(controller)的輸出沒有影響。在這種操控體系中,不依托將被控量反送回來以構(gòu)成任何閉環(huán)回路。
2、閉環(huán)操控體系
閉環(huán)操控體系(closed-loopcontrolsystem)的特征是體系被控方針的輸出(被操控量)會(huì)反送回來影響操控器的輸出,構(gòu)成一個(gè)或多個(gè)閉環(huán)。閉環(huán)操控體系有正反響和負(fù)反響,若反響信號(hào)與體系給定值信號(hào)相反,則稱為負(fù)反響(NegativeFeedback),若極性一樣,則稱為正反響,一般閉環(huán)操控體系均選用負(fù)反響,又稱負(fù)反響操控體系。閉環(huán)操控體系的比方許多。比方人即是一個(gè)具有負(fù)反響的閉環(huán)操控體系,雙眼即是傳感器,充任反響,人體體系能經(jīng)過不斷的批改終究作出各種準(zhǔn)確的動(dòng)作。假定沒有雙眼,就沒有了反響回路,也就成了一個(gè)開環(huán)操控體系。另例,當(dāng)一臺(tái)實(shí)在的全主動(dòng)洗衣機(jī)具有能接連查看衣物是不是洗凈,并在洗凈往后能主動(dòng)堵截電源,它即是一個(gè)閉環(huán)操控體系。
3、階躍照料
階躍照料是指將一個(gè)階躍輸入(stepfunction)加到體系上時(shí),體系的輸出。穩(wěn)態(tài)過失是指體系的照料進(jìn)入穩(wěn)態(tài)后﹐體系的希望輸出與實(shí)習(xí)輸出之差。操控體系的功用可以用穩(wěn)、準(zhǔn)、快三個(gè)字來描繪。穩(wěn)是指體系的安穩(wěn)性(stability),一單個(gè)系要能正常作業(yè),首要有必要是安穩(wěn)的,從階躍照料上看應(yīng)當(dāng)是收斂的﹔準(zhǔn)是指操控體系的準(zhǔn)確性、操控精度,一般用穩(wěn)態(tài)過失來(Steady-stateerror)描繪,它標(biāo)明體系輸出穩(wěn)態(tài)值與希望值之差﹔快是指操控體系照料的活絡(luò)性,一般用上升時(shí)刻來定量描繪。
4、PID操控的原理和特征
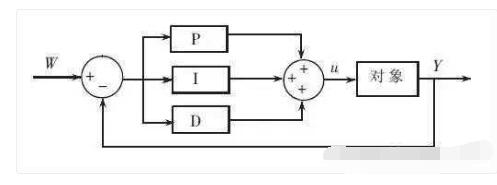
在工程實(shí)習(xí)中,運(yùn)用最為廣泛的調(diào)度器操控規(guī)矩為份額、積分、微分操控,簡(jiǎn)稱PID操控,又稱PID調(diào)度。PID操控器面世至今已有近70年前史,它以其構(gòu)造簡(jiǎn)略、安穩(wěn)性好、作業(yè)牢靠、調(diào)整便當(dāng)而變成工業(yè)操控的首要技能之一。當(dāng)被控方針的構(gòu)造和參數(shù)不能徹底把握,或得不到準(zhǔn)確的數(shù)學(xué)模型時(shí),操控理論的其它技能難以選用時(shí),體系操控器的構(gòu)造和參數(shù)有必要依托閱歷和現(xiàn)場(chǎng)調(diào)試來斷定,這時(shí)運(yùn)用PID操控技能最為便當(dāng)。即當(dāng)咱們不徹底了解一單個(gè)系和被控方針﹐或不能經(jīng)過有用的丈量方法來取穩(wěn)當(dāng)系參數(shù)時(shí),最適宜用PID操控技能。PID操控,實(shí)習(xí)中也有PI和PD操控。PID操控器即是依據(jù)體系的過失,運(yùn)用份額、積分、微分核算出操控量進(jìn)行操控的。
份額(P)操控
份額操控是一種最簡(jiǎn)略的操控方法。其操控器的輸出與輸入過失信號(hào)成份額聯(lián)絡(luò)。當(dāng)僅有份額操控時(shí)體系輸出存在穩(wěn)態(tài)過失(Steady-stateerror)。
積分(I)操控
在積分操控中,操控器的輸出與輸入過失信號(hào)的積分紅正比聯(lián)絡(luò)。對(duì)一個(gè)主動(dòng)操控體系,假定在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)過失,則稱這個(gè)操控體系是有穩(wěn)態(tài)過失的或簡(jiǎn)稱有差體系(SystemwithSteady-stateError)。為了消除穩(wěn)態(tài)過失,在操控器中有必要引進(jìn)“積分項(xiàng)”。積分項(xiàng)對(duì)過失取決于時(shí)刻的積分,跟著時(shí)刻的添加,積分項(xiàng)會(huì)增大。這么,即使過失很小,積分項(xiàng)也會(huì)跟著時(shí)刻的添加而加大,它推進(jìn)操控器的輸出增大使穩(wěn)態(tài)過失進(jìn)一步減小,直到等于零。因而,份額+積分(PI)操控器,可以使體系在進(jìn)入穩(wěn)態(tài)后無穩(wěn)態(tài)過失。
微分(D)操控
在微分操控中,操控器的輸出與輸入過失信號(hào)的微分(即過失的改動(dòng)率)成正比聯(lián)絡(luò)。主動(dòng)操控體系在打敗過失的調(diào)度進(jìn)程中或許會(huì)呈現(xiàn)振動(dòng)乃至失穩(wěn)。其要素是因?yàn)榇嬖谟休^大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有按捺過失的效果,其改動(dòng)老是落后于過失的改動(dòng)。處理的方法是使按捺過失的效果的改動(dòng)“超前”,即在過失挨近零時(shí),按捺過失的效果就應(yīng)當(dāng)是零。這即是說,在操控器中僅引進(jìn)“份額”項(xiàng)一般是不行的,份額項(xiàng)的效果僅是拓寬過失的幅值,而如今需求添加的是“微分項(xiàng)”,它能猜想過失改動(dòng)的趨勢(shì),這么,具有份額+微分的操控器,就可以提早使按捺過失的操控效果等于零,乃至為負(fù)值,然后避免了被控量的嚴(yán)峻超調(diào)。所以對(duì)有較大慣性或滯后的被控方針,份額+微分(PD)操控器能改進(jìn)體系在調(diào)度進(jìn)程中的動(dòng)態(tài)特性。
-
PID
+關(guān)注
關(guān)注
35文章
1473瀏覽量
85762
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何使用Python實(shí)現(xiàn)PID控制
如何選擇合適的PID控制器
如何調(diào)節(jié)PID參數(shù) PID控制器的調(diào)試方法
PID控制器的類型和選擇指南
什么是PID控制與傳統(tǒng)控制的區(qū)別
PID控制的優(yōu)缺點(diǎn)分析 PID參數(shù)調(diào)節(jié)的常見方法
如何使用PID進(jìn)行溫度控制
PID算法的基本原理介紹
串級(jí)pid內(nèi)環(huán)和外環(huán)怎么確定
PID控制的原理與作用
PID在工業(yè)控制領(lǐng)域的應(yīng)用
位置式PID與增量式PID的區(qū)別
請(qǐng)問一下STM MCSDK_v5.3.2的PID(PI_Controller() function)是增量式PID或位置式PID?
什么是PID?PID各個(gè)參數(shù)有什么作用?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論