") 直流伺服電機(jī)機(jī)械特性_直流伺服電機(jī)的控制方式
直流伺服電機(jī)機(jī)械特性_直流伺服電機(jī)的控制方式
直流伺服電機(jī)機(jī)械特性
1. 機(jī)械特性
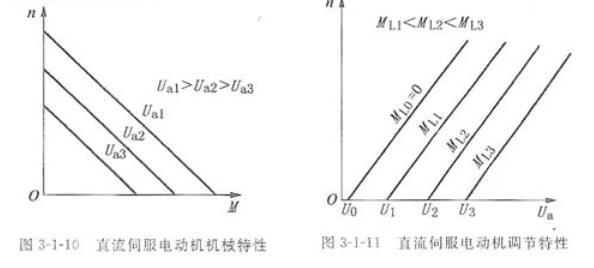
直流伺服電動(dòng)機(jī)機(jī)械特性表示在規(guī)定的輸入條件下下,轉(zhuǎn)速n與轉(zhuǎn)矩m之間的關(guān)系n=f(m)如圖3-1-10.機(jī)械特性的線性愈高,系統(tǒng)的動(dòng)態(tài)誤差愈小,動(dòng)態(tài)性能就愈高。圖中ua為電樞控制電壓。
2.調(diào)節(jié)特性
直流伺服電動(dòng)機(jī)調(diào)節(jié)特性表示在一定的勵(lì)磁條件下,輸出轉(zhuǎn)矩恒定時(shí),穩(wěn)態(tài)轉(zhuǎn)速n與電樞控制電壓ua之間的關(guān)系n=f(ua)見圖3-1-11.u0、u1、u2、u3分別對(duì)應(yīng)電機(jī)不同負(fù)載轉(zhuǎn)矩為ml0 、ml1、ml2、ml3時(shí)的始動(dòng)電壓,負(fù)載轉(zhuǎn)矩越大,電動(dòng)機(jī)制動(dòng)和始動(dòng)電壓越大。
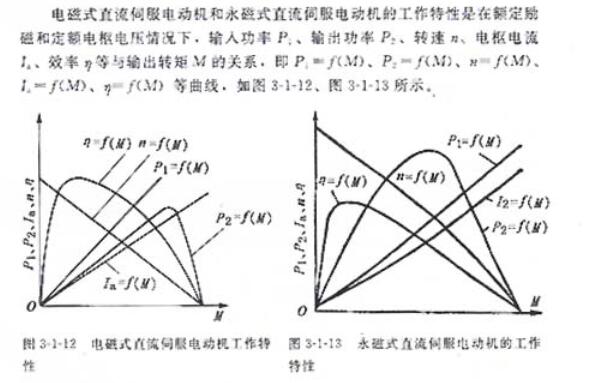
3.工作特性
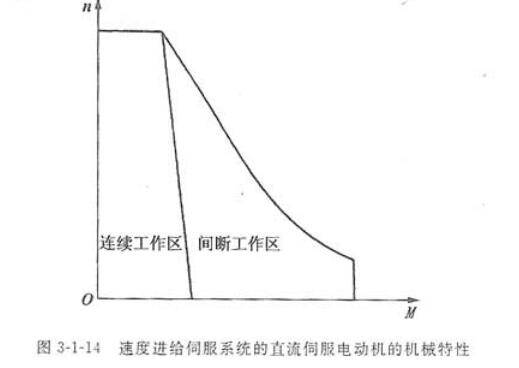
在機(jī)床行業(yè),國內(nèi)外大量采用寬調(diào)速直流伺服電動(dòng)機(jī),主要用于機(jī)床的進(jìn)給裝置。速度進(jìn)給伺服系統(tǒng)的直流伺服電動(dòng)機(jī)的機(jī)械特性如圖3-1-14.
直流伺服電機(jī)的控制方式
直流伺服電動(dòng)機(jī)的控制方式主要有兩種:一種是電樞電壓控制,即在定子磁場不變的情況下,通過控制施加在電樞繞組兩端的電壓信號(hào)來控制電動(dòng)機(jī)的轉(zhuǎn)速和輸出轉(zhuǎn)矩;另一種是勵(lì)磁磁場控制,即通過改變勵(lì)磁電流的大小來改變定子磁場強(qiáng)度,從而控制電動(dòng)機(jī)的轉(zhuǎn)速和輸出轉(zhuǎn)矩。
采用電樞電壓控制方式時(shí),由于定子磁場保持不變,其電樞電流可以達(dá)到額定值,相應(yīng)的輸出轉(zhuǎn)矩也可以達(dá)到額定值,因而這種方式又被稱為恒轉(zhuǎn)矩調(diào)速方式。
而采用勵(lì)磁磁場控制方式時(shí),由于電動(dòng)機(jī)在額定運(yùn)行條件下磁場已接近飽和,因而只能通過減弱磁場的方法來改變電動(dòng)機(jī)的轉(zhuǎn)速。由于電樞電流不允許超過額定值,因而隨著磁場的減弱,電動(dòng)機(jī)轉(zhuǎn)速增加,但輸出轉(zhuǎn)矩下降,輸出功率保持不變,所以這種方式又被稱為恒功率調(diào)速方式。
電機(jī)到了最后就是靠電流控制磁場,那種電機(jī)都是這個(gè)原理,但直流伺服是閉環(huán)的,過程有補(bǔ)償定位,所以強(qiáng)過步進(jìn)。
伺服電機(jī)有兩種輸入信號(hào):模擬量和脈沖。所謂模擬量就是電壓,比如輸入電壓范圍是-10~10v的,-10V對(duì)應(yīng)電機(jī)反轉(zhuǎn)最大轉(zhuǎn)速,0v對(duì)應(yīng)不轉(zhuǎn),10v對(duì)應(yīng)正轉(zhuǎn)最大轉(zhuǎn)速。脈沖信號(hào)就是通過上位機(jī)(單片機(jī),plc,cnc控制系統(tǒng)等)發(fā)出脈沖信號(hào),發(fā)送脈沖的頻率決定了電機(jī)的轉(zhuǎn)速。脈沖的類型有雙脈沖,正交脈沖和轉(zhuǎn)速加方向型3種。伺服電機(jī)不管直流還是交流都是這樣的。
-
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2051瀏覽量
57964 -
直流伺服電機(jī)
+關(guān)注
關(guān)注
4文章
54瀏覽量
10614
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論