") 電機(jī)轉(zhuǎn)子找平衡的方法有哪些
電機(jī)轉(zhuǎn)子找平衡的方法有哪些
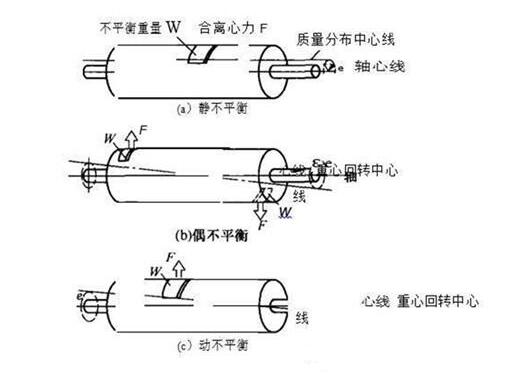
轉(zhuǎn)動(dòng)機(jī)械在運(yùn)行中有一項(xiàng)重要指標(biāo),就是振動(dòng)。振動(dòng)要求越小越好。轉(zhuǎn)動(dòng)機(jī)械產(chǎn)生振動(dòng)的原因很復(fù)雜,其中以轉(zhuǎn)動(dòng)機(jī)械的轉(zhuǎn)動(dòng)部分(轉(zhuǎn)子)質(zhì)量不平衡而引起的振動(dòng)最為普遍。
長(zhǎng)期不正常的振動(dòng),會(huì)使機(jī)組金屬材料疲勞而損壞,轉(zhuǎn)子上的緊固件發(fā)生松動(dòng),間隙小的裝配件動(dòng)靜部分發(fā)生摩擦使軸發(fā)生彎曲等缺陷。不允許時(shí)間很短的震動(dòng)過大,尤其是對(duì)高轉(zhuǎn)速大容量的機(jī)組,后果更為嚴(yán)重。現(xiàn)將在轉(zhuǎn)子找平衡工作中使用的方法及過程進(jìn)行介紹。
1、剛性轉(zhuǎn)子與剛性轉(zhuǎn)子找動(dòng)平衡的必備條件
轉(zhuǎn)子可分為剛性轉(zhuǎn)子和撓性轉(zhuǎn)子兩類。剛性轉(zhuǎn)子是指轉(zhuǎn)子在不平衡力的作用下,轉(zhuǎn)子軸線不發(fā)生動(dòng)撓曲變形;撓性轉(zhuǎn)子是指轉(zhuǎn)子在不平衡力的作用下,轉(zhuǎn)子軸線發(fā)生動(dòng)撓曲變形。嚴(yán)格地講,剛性轉(zhuǎn)子絕對(duì)不存在,但習(xí)慣上把轉(zhuǎn)子在不平衡力作用下,轉(zhuǎn)子軸線沒有顯著變形,即撓曲造成的附加不平衡可以忽略不計(jì)的轉(zhuǎn)子,都作為剛性轉(zhuǎn)子對(duì)待。在找轉(zhuǎn)子平衡工作中,如果把轉(zhuǎn)子設(shè)定為剛體,則可使轉(zhuǎn)子復(fù)雜的不平衡狀態(tài)簡(jiǎn)化為一般的力系平衡狀態(tài),從而大大簡(jiǎn)化找平衡的方法。剛性轉(zhuǎn)子具備了用一般力系關(guān)系找平衡的兩個(gè)必備條件:①轉(zhuǎn)子不平衡質(zhì)量所產(chǎn)生的離心力與振幅成正比。②當(dāng)轉(zhuǎn)速不變時(shí),振幅滯后于擾動(dòng)的滯后角是一定值。
2、高速動(dòng)平衡與低速動(dòng)平衡
轉(zhuǎn)子高速動(dòng)平衡一般是在機(jī)體內(nèi)進(jìn)行的,試驗(yàn)時(shí)的轉(zhuǎn)速底于或等于工作轉(zhuǎn)速,稱試驗(yàn)時(shí)的轉(zhuǎn)速為平衡轉(zhuǎn)速。找平衡時(shí),是用動(dòng)平衡機(jī)測(cè)出轉(zhuǎn)子不平衡的相位及振幅。低速動(dòng)平衡,它不是用平衡儀器進(jìn)行測(cè)相、測(cè)振,因轉(zhuǎn)子處于低速狀態(tài),其不平衡質(zhì)量所產(chǎn)生的不平衡力很小,不足以使轉(zhuǎn)子產(chǎn)生明顯可測(cè)的振幅,因而也就無法用動(dòng)平衡儀器測(cè)出不平衡力的相位。
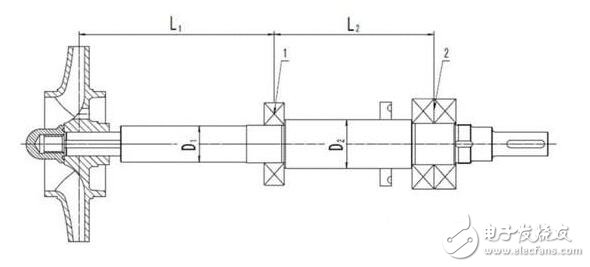
低速動(dòng)平衡是專用的低速動(dòng)平衡臺(tái)上進(jìn)行的,平衡臺(tái)采用一種可擺式軸承,使軸承在底轉(zhuǎn)速時(shí)與不平衡力發(fā)生共振,并將振動(dòng)改變?yōu)檫m當(dāng)?shù)摹⒖蓽y(cè)的往復(fù)運(yùn)動(dòng)。然后通過二次以上加試加重試驗(yàn),即可得到兩次以上不同的合振幅值,根據(jù)每次的加重位置和加重后的合振幅,再進(jìn)行作圖與計(jì)算,求出應(yīng)加重的方位與大小。低速動(dòng)平衡不能采用測(cè)相、測(cè)振法,但高速動(dòng)平衡可采用找低速動(dòng)平衡的任何一種方法。
「試加重量周移法找低速動(dòng)平衡」
(1)試加重量前,先將轉(zhuǎn)子升速至略高于轉(zhuǎn)子的共振轉(zhuǎn)速,然后拉開離合器讓轉(zhuǎn)子靠慣性旋轉(zhuǎn),隨即松開動(dòng)平衡臺(tái)兩側(cè)軸承的固定螺栓,轉(zhuǎn)速每降低10r/min,記錄一次百分表數(shù)值(轉(zhuǎn)子的振幅)。在轉(zhuǎn)子的降速過程中,軸承振動(dòng)的振幅急劇增加,此時(shí)的轉(zhuǎn)速(此時(shí)振幅最大為共振振幅)就是共振轉(zhuǎn)速。這個(gè)轉(zhuǎn)速應(yīng)當(dāng)測(cè)的準(zhǔn)確,因?yàn)檗D(zhuǎn)子在整個(gè)找動(dòng)平衡過程中,都要以共振轉(zhuǎn)速的振幅變化為依據(jù)。令振動(dòng)大的一端為A側(cè),另一端為B側(cè)。找動(dòng)平衡時(shí),先做A側(cè)再做B側(cè)。
(2)將轉(zhuǎn)子兩側(cè)的平衡面按同一起點(diǎn)分成6-8等份,并按轉(zhuǎn)動(dòng)方向編上序號(hào)。
根據(jù)上述測(cè)出的A側(cè)共振振幅A。,計(jì)算試加重量P:
(3)把試加重量依次固定在A側(cè)的各等分點(diǎn)上,并測(cè)記各點(diǎn)共振振幅。當(dāng)各點(diǎn)出現(xiàn)共振振幅時(shí),共振轉(zhuǎn)速應(yīng)保持不變。若共振轉(zhuǎn)速有變化,則應(yīng)找出原因,消除缺陷。測(cè)記時(shí)若共振振幅出現(xiàn)在測(cè)速員兩次口令之間時(shí),記錄員應(yīng)按實(shí)際記錄下共振振幅。當(dāng)轉(zhuǎn)速降到底于共振轉(zhuǎn)速20-40r/min時(shí)即可停測(cè)。
(4)以各等分點(diǎn)為橫坐標(biāo),以各點(diǎn)的共振振幅為縱坐標(biāo),繪出曲線。共振振幅最小的點(diǎn),即為加平衡重量的位置。
(5)把平衡重量加在Amin位置,起動(dòng)試驗(yàn)對(duì)加重位置和重量多少再加以細(xì)致的調(diào)整,使A側(cè)軸承振幅不超過允許限度。
①用同樣的方法求出B側(cè)的平衡重量及位置。
②當(dāng)求出兩側(cè)平衡重量后,為了保證在同時(shí)松開軸承時(shí)保持平衡,應(yīng)將B側(cè)平衡重量分成x和y兩個(gè)重量。
X=Qb*mn/(mn-ab)(g)
Y=Qb*nb*R2/(mn-ab)*R1(g)
③固定好兩側(cè)的平衡重量后,再啟動(dòng)轉(zhuǎn)子,在兩個(gè)軸承均松開的狀態(tài)下,測(cè)量?jī)蓚?cè)軸承振幅。如不合格,可根據(jù)剩余振幅另求試加重量,直到合格為止。
(6)簡(jiǎn)單測(cè)相(劃線)法找動(dòng)平衡
①在靠近轉(zhuǎn)子附近的軸上選擇一段長(zhǎng)20-40mm,表面光滑、無銹蝕不晃動(dòng)、無橢圓的軸段,作為劃線位置,并在該段上涂一層白粉。起動(dòng)轉(zhuǎn)子至額定轉(zhuǎn)速,轉(zhuǎn)速穩(wěn)定后,用鉛筆或劃針向涂白粉的軸段緩慢、平穩(wěn)的靠近,在該軸段上劃3-5道線段,線段越短越好。同時(shí)用震動(dòng)表測(cè)取靠近轉(zhuǎn)子的軸承上的振幅A1。停機(jī)后找出軸上各條用鉛筆劃線痕跡的中點(diǎn),并將該點(diǎn)沿徑向移到轉(zhuǎn)子平衡面上(設(shè)該點(diǎn)為A),此點(diǎn)即為第一次劃線位置。
②確定試加重量,根據(jù)轉(zhuǎn)子轉(zhuǎn)速、加重半徑及振幅,查取1t重轉(zhuǎn)子不平衡度G1。G1是針對(duì)中等剛性的軸承外殼所規(guī)定的數(shù)值,對(duì)于剛性較大的軸承,其G1值尚須乘1.0-1.5的系數(shù)。根據(jù)G1值即可得出轉(zhuǎn)子不平衡度G值,P=0.5G(g)。
③自平衡面上A點(diǎn)退后90°得C點(diǎn),在C點(diǎn)上加上試加重量P。再啟動(dòng)轉(zhuǎn)子,按前操作方法進(jìn)行第二次劃線,并將劃線中點(diǎn)移至平衡面上(B點(diǎn)),并測(cè)記軸承振動(dòng)振幅A2。
④根據(jù)兩次劃線位置(A、B)和兩次軸承振幅(A1、A2),作圖
Q=P*Oa/ab
將平衡重量Q加在D點(diǎn)上,起動(dòng)轉(zhuǎn)子,進(jìn)行試驗(yàn),若振幅不合格,可對(duì)Q值及其位置作適當(dāng)調(diào)整。若轉(zhuǎn)子位于兩軸承之間,則應(yīng)先在振幅較大的一側(cè)找好平衡,再進(jìn)行另一側(cè)的找平衡,并將其平衡重量按周移法分配至兩平衡面上。
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9023瀏覽量
145556 -
轉(zhuǎn)子
+關(guān)注
關(guān)注
2文章
327瀏覽量
17846
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電機(jī)轉(zhuǎn)子運(yùn)動(dòng)慣量的計(jì)算方法哪些
永磁同步電機(jī)的轉(zhuǎn)子位置估計(jì)方法
內(nèi)轉(zhuǎn)子電機(jī)對(duì)比外轉(zhuǎn)子電機(jī)有什么優(yōu)勢(shì)?
剛性轉(zhuǎn)子動(dòng)平衡設(shè)計(jì)與實(shí)驗(yàn)
發(fā)電機(jī)轉(zhuǎn)子動(dòng)平衡簡(jiǎn)介
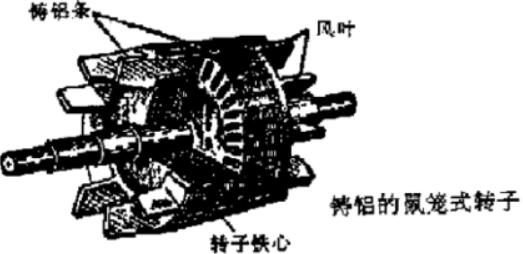
鼠籠式電機(jī)轉(zhuǎn)子結(jié)構(gòu)_鼠籠式電機(jī)轉(zhuǎn)子有電流嗎





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論