 盲人觸覺手套DIY圖解
盲人觸覺手套DIY圖解
步驟1:耗材列表
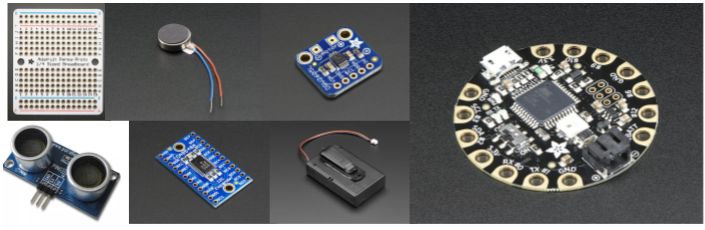
電子:
-#1201:振動微型電機盤-ERM(x4)[$ 1.95 ea。]
- #2305:Adafruit DRV2605L觸覺電機控制器(x4)[每個$ 7.95]
-#659:FLORA-可穿戴電子平臺-Arduino兼容[$ 14.95]
-HC-SR04超聲波距離傳感器(x2)[每件$ 2.99]
-#2717:TCA9548A I2C多路復用器[$ 6.95]
-#3287:3節AA電池座,帶JST連接器[$ 2.95]
-#1608:Adafruit Perma-Proto四分之一面包板PCB-單[$ 2.95]
-帶狀電纜
-200和220歐姆電阻器
制造:
-魔術貼[$ 2.98]
-#615:針組-3/9尺寸-20針[$ 1.95]
-氯丁橡膠或其他任何耐用的面料
總費用:78.31美元
大多數組件ts是從Adafruit.com購買的
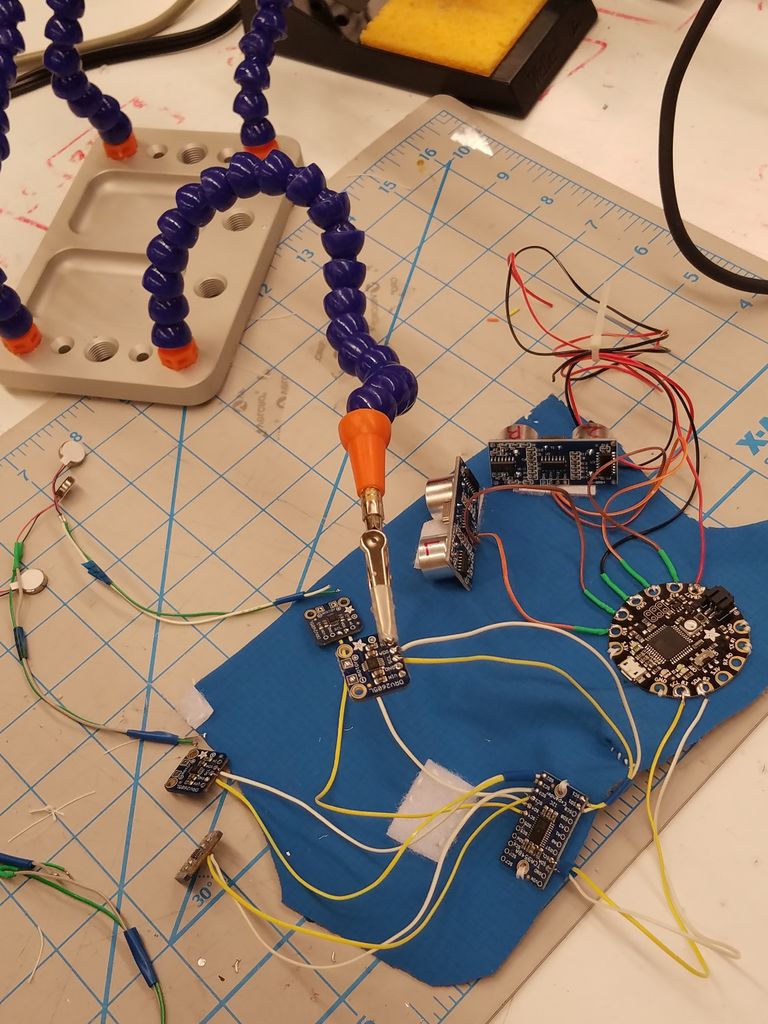
步驟2:試驗板
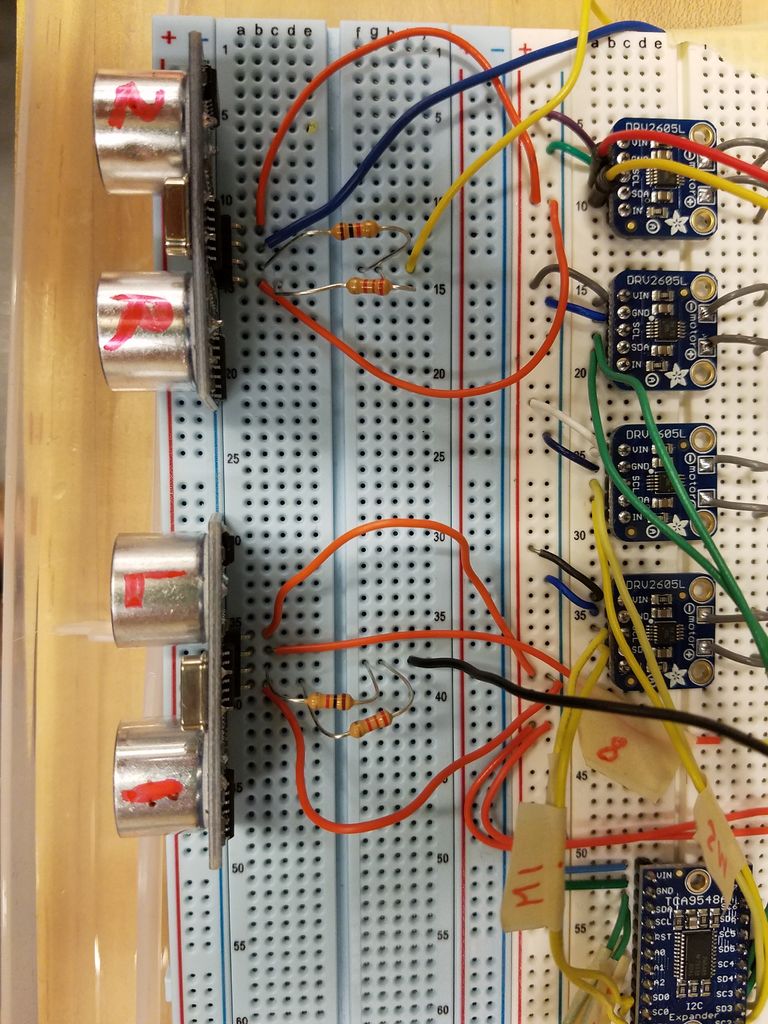
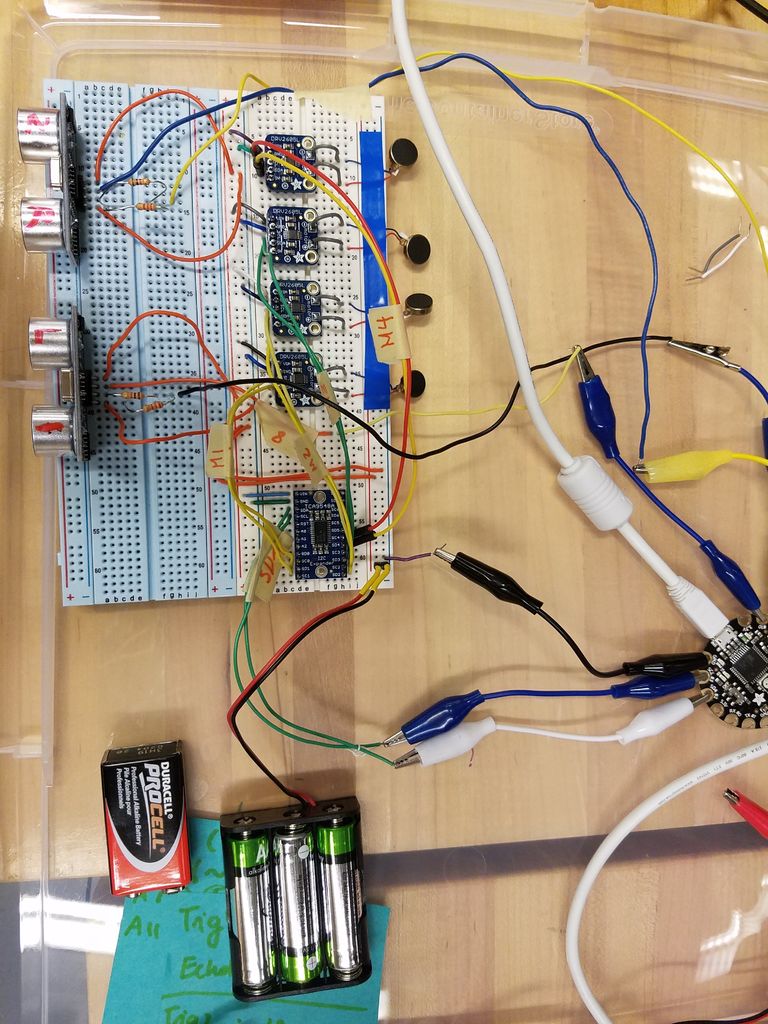
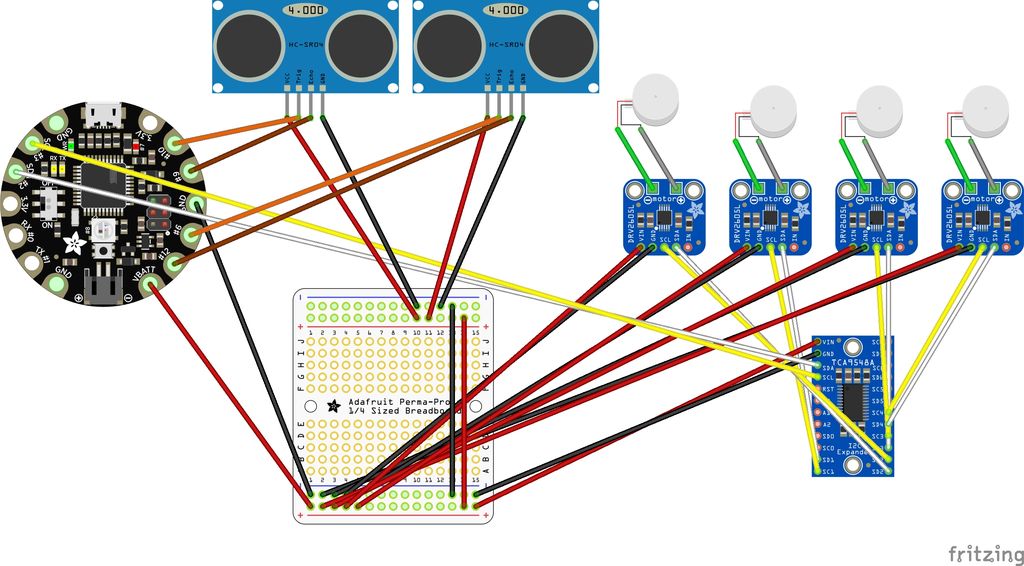
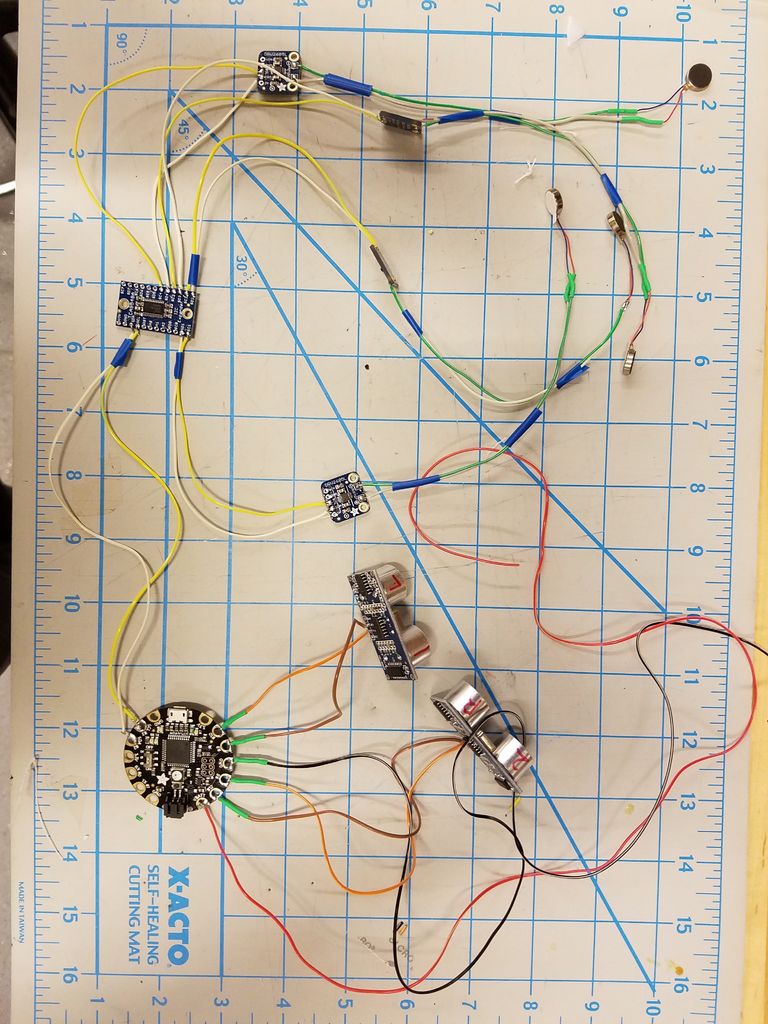
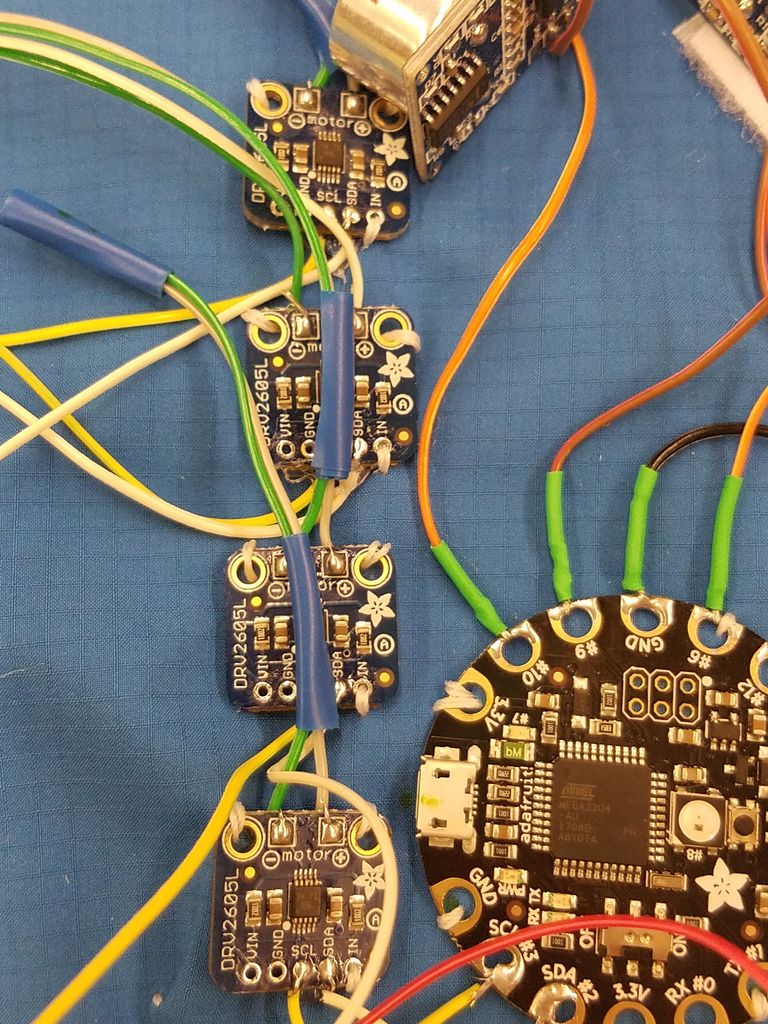
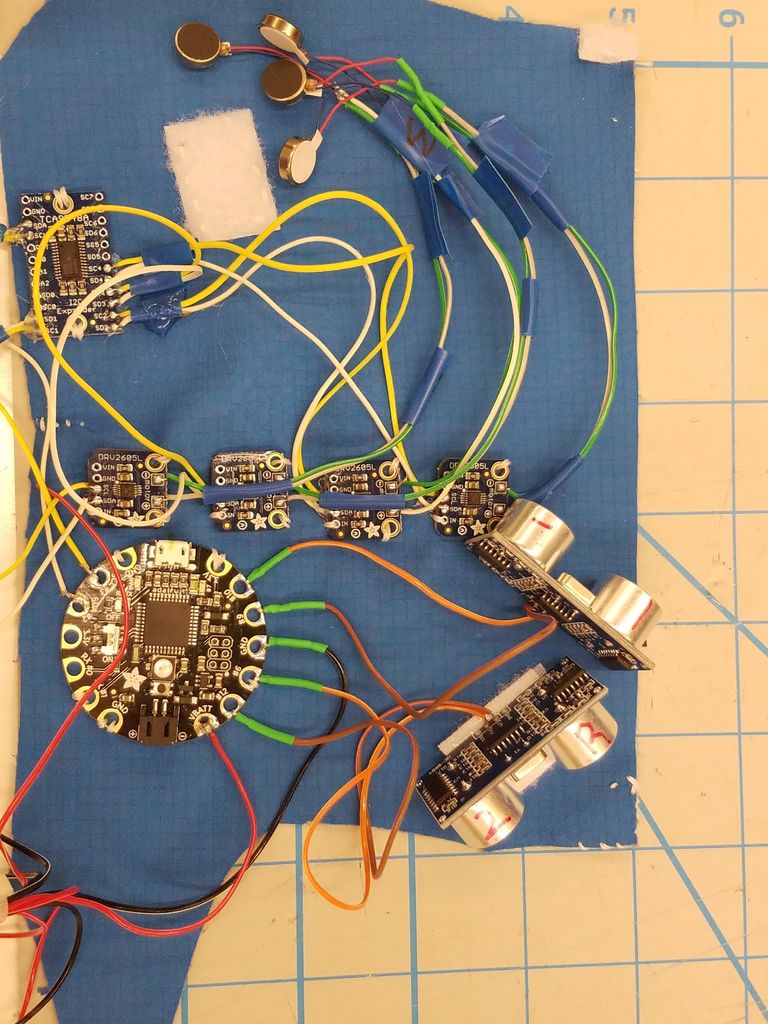
第一步是連接所有組件都使用面包板,以便在將它們固定到最終產品上之前確保它們均正常工作。以下電路圖和圖像可讓您大致了解所有連接位置。以下是每個組件的功能細分:
Arduino Uno/FLORA
這是微控制器,它是可編程的部分。它還從電池為所有組件供電。最初,我將所有東西都連接到Arduino Uno,因為它有5v的電源,但是后來用FLORA和3節AA電池(4.5v)代替了它。
觸覺電機控制器
這些控制器直接連接到每個振動電機,并允許您彼此獨立地編程每個振動電機,同時還具有包括預先確定的振動效果庫的優點。這些對于手套的功能并不重要,但是由于您無需從頭開始編程自己的振動模式,因此使編程變得容易得多。
多工器
這只是一種擴展器,因為FLORA上沒有足夠的SCL/SDA引腳來容納所有觸覺電機控制器。通過為每個觸覺電機控制器分配一個唯一的地址,它還允許您獨立地與每個觸覺電機控制器進行通信。
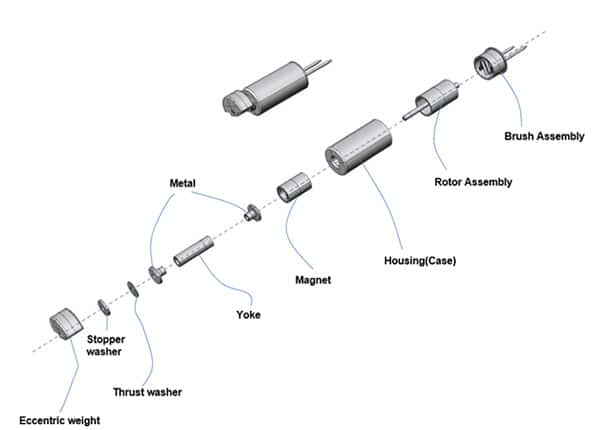
振動電機
這些為用戶提供了觸覺反饋。它們以某些模式振動,具體取決于您如何編程。有關它們在這里如何工作的更多信息。
超聲波傳感器
這些傳感器用于測量物體前方的距離。他們通過發出“觸發”信號來做到這一點,該信號從附近的任何物體彈起并作為“回波”信號返回。然后,程序可以解釋延遲時間并計算近似距離。確保將它們分別標記為“左”和“右”,以免日后混淆。
第3步:編碼
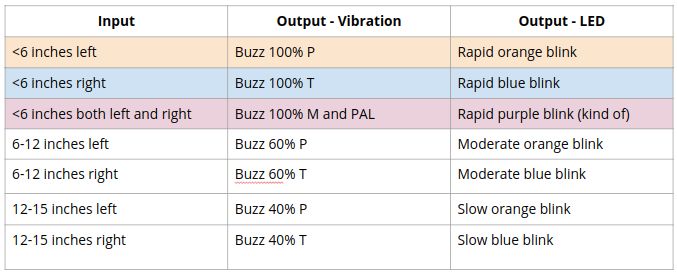
現在,一切都已連接,您可以將代碼下載到您的FLORA并進行測試。下載下面的文件和必要的庫(在下面鏈接)。該示例代碼具有上表中列出的功能。
要測試該代碼,請在距離右側超聲波傳感器不到6英寸的地方放置一個大的扁平物體。板載RBG應該快速閃爍藍色。當您將對象移到更遠的位置時,閃爍的速度會變慢。同時,當距離物體不到6英寸時,其中一個振動電機(稍后將放在拇指上)將迅速振動,并隨著您將物體移開的距離越來越小而開始振動。左超聲波傳感器應該保持相同的模式,只是橙色而不是藍色
我添加了一個附加功能,即RBG應該閃爍粉紅色,而中指和手掌振動傳感器應該閃爍當兩個傳感器都檢測到距離小于6英寸的物體時,振動。但是,此功能不是很可靠。我將中指和手掌振動電機保留在最終設計中,以防人們想為它們提供更具創造性的功能。
*請勿* 插入FLORA板在仍然連接外部電池的情況下,通過usb進入計算機!始終先從外部電池上拔下它。
*之前* 下載此處提供的示例代碼,您將需要下載以下庫/驅動程序:
HTTPS://learn.adafruit.com/adafruit-arduino-ide-se 。..
HTTPS://github.com/adafruit/Adafruit_DRV2605_Libra 。..
HTTPS ://github.com/adafruit/Adafruit_NeoPixel
如果代碼似乎未在運行或者您的傳感器/電機沒有響應:
-確保已選擇
-確保振動馬達已完全連接到面包板/觸覺馬達控制器。連接它們的電線很細,很容易松動。
-再次檢查您是否沒有混用SCL/SDA電線(多路復用器)或ECHO和TRIG電線(超聲波傳感器)。
-如果通過USB插入時一切正常,但在連接到外部電池時出現故障,則可能是時候更換新電池了。
- p》
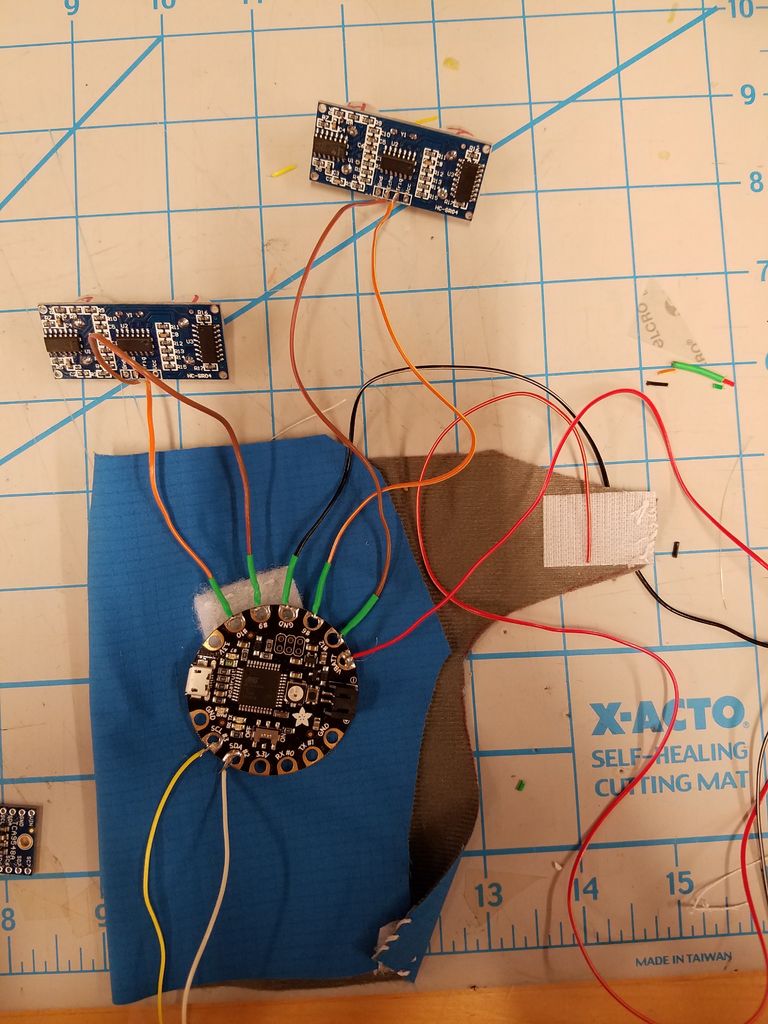
第4步:焊接數據連接
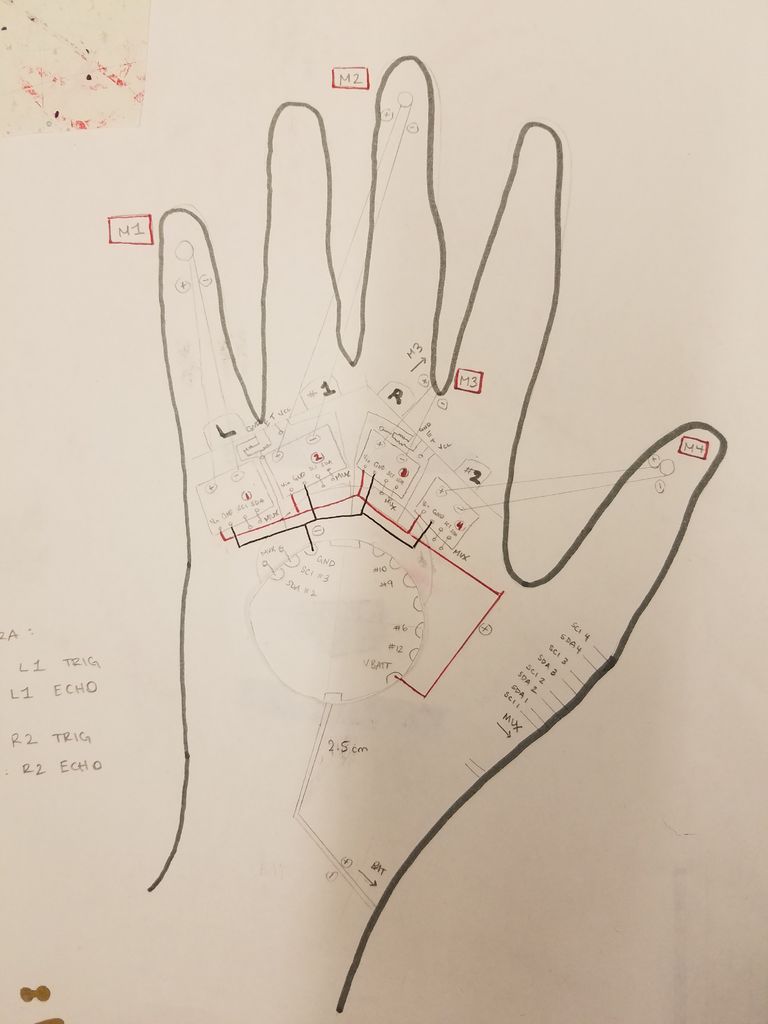
現在確認該代碼為開始工作后,您就可以開始組裝最終產品了。首先,我要在一只手的輪廓上繪制所有連接,以可視化所有最終連接。我首先關注所有數據連接,然后最后連接電源線和地線。同樣在這個階段,我忘了將電阻器焊接到超聲波傳感器(oops)的ECHO和GND引腳上,因此它們不在圖像中。當我將超聲波傳感器連接到手套中央的電源“集線器”時,我最終添加了它們。
我首先將所有連接焊接到FLORA,然后逐步通過多路復用器,觸覺電機控制器和振動電機。我用熱膠,熱縮管和電工膠帶加強了連接。
在所有圖像中,電線顏色對應于以下連接:
紅色:電源
黑色:接地
黃色:scl
白色:sda
綠色:電機(-)
灰色:電機( +)
棕色:超聲傳感器回聲
橙色:超聲傳感器trig
步驟5:制作手套
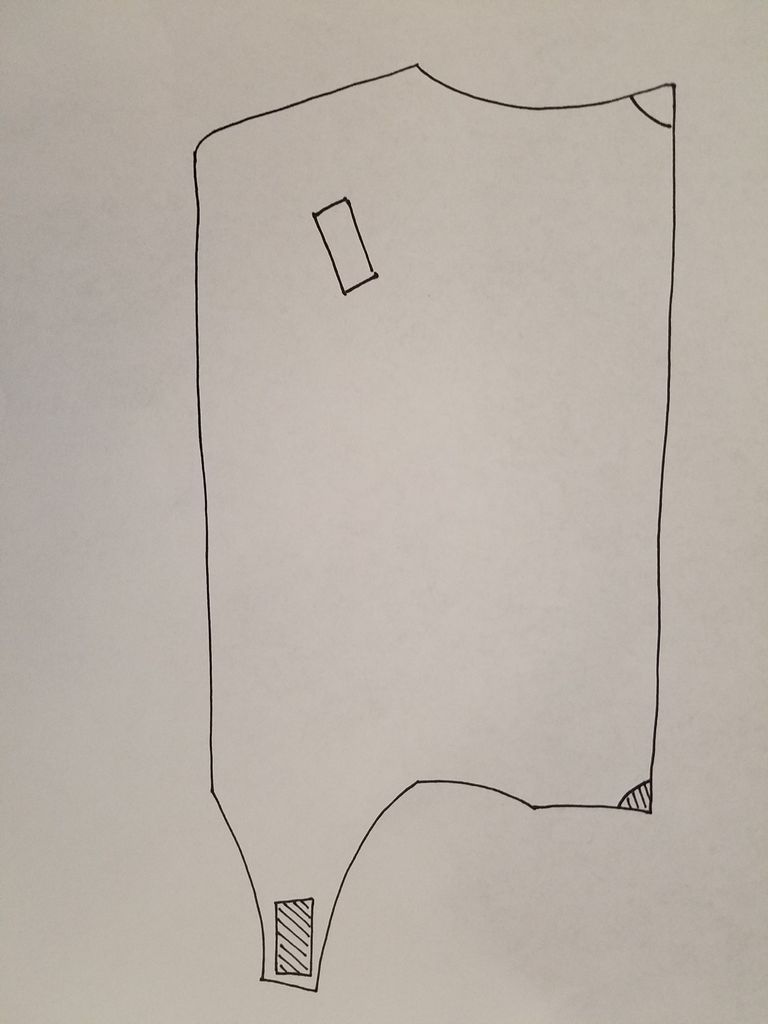
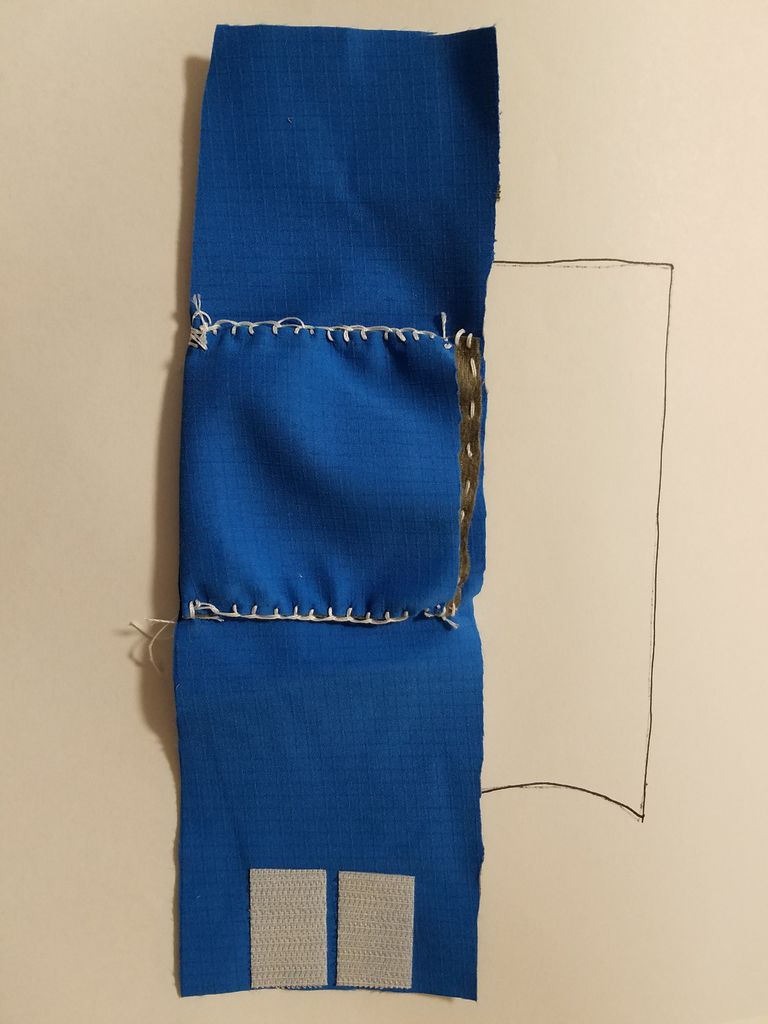
手套由以下組件組成:
-手套主體(其中
-握住手掌的振動)
-3條手指帶(細,中,拇指),其中3條振動電機用于握住
-臂帶以固定電池組
為簡單起見,我決定采用無指手套設計,您可以在上面看到常規模板。該草圖未按比例繪制,您可能必須調整尺寸以適合您的手。它應該戴在左手上。我首先在某種織物的底面上找出設計,然后用Xacto刀將其剪下。我通過切出足夠長的織物條來包裹手指,然后縫上魔術貼皮帶以將其固定到位,從而形成手指片。然后,我制作了一些小袋來存放振動電機,并將它們縫在手指帶和手套主體下側中間(手掌附近)的位置。
這種設計需要最少的縫制,并且我只在以下情況下縫制:
-在織物上粘合/加固魔術貼條。
-將振動電機套縫在指帶和手套主體上。
-在腕帶上構造電池袋。
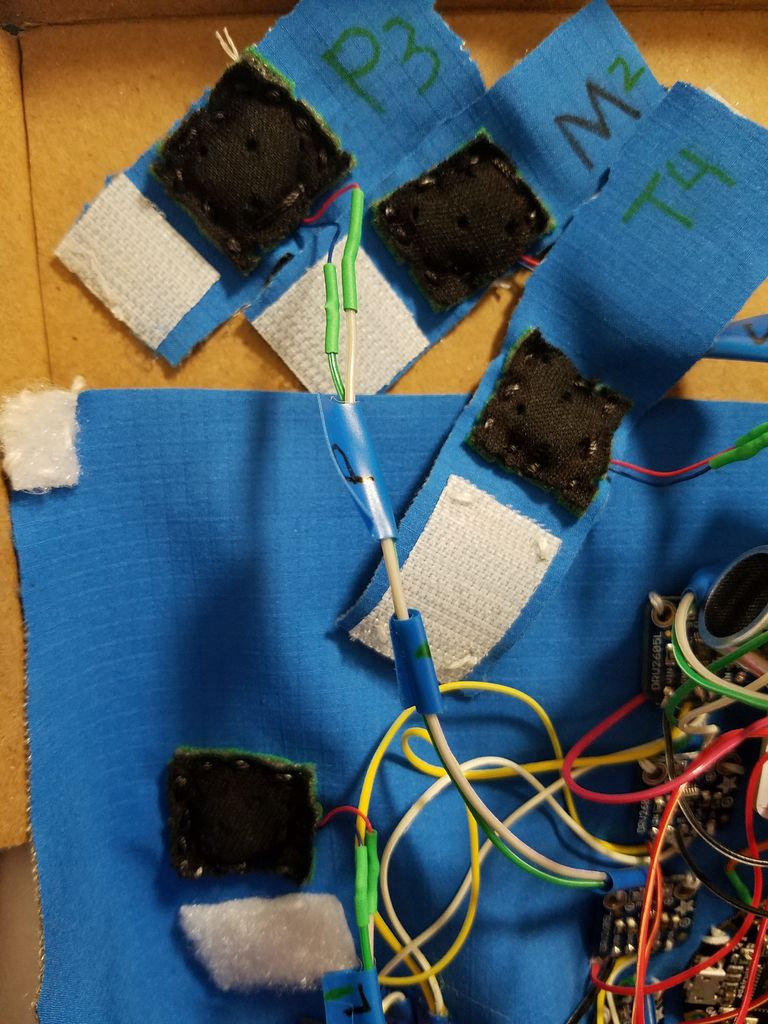
步驟6:Assemby(第1部分)
現在,組裝好手套并完成所有布線后,我開始將電氣部件粘附到手套上。在這一步中,我遵循了之前制作的圖紙并布置了所有零件。然后我開始用麻線縫制它們。我最終將觸覺電機控制器放在手套的左側而不是頂部,因為一旦我開始組裝,這種方式就更有意義了。
步驟7:組裝(第2部分- PWR + GND)
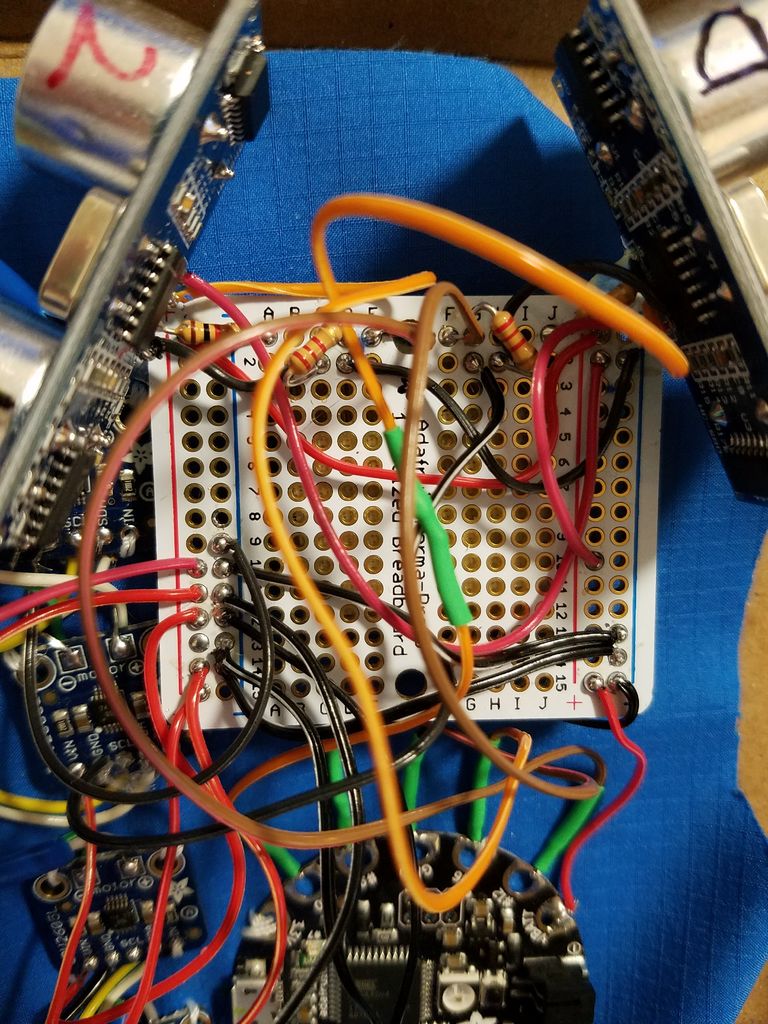
最后,我將所有組件都連接到電源和地。為此,我將小型面包板上的接地和電源導軌連接到了FLORA的gnd和pwr。我將觸覺電機控制器和多路復用器連接到這些導軌。然后,我將超聲波傳感器連接到pwr和gnd,但是還利用了面包板上的額外空間來添加我之前忘記的電阻器。這些電阻是必不可少的,因為它們會產生一個分壓器,以降低ECHO信號的電壓,該電壓會回落到FLORA。
在縫合完所有部件之后,焊接gnd和pwr連接有點不穩定,因此您可能需要先進行所有焊接。我之所以等待,是因為我仍然不確定所有組件的最終布局將是什么。
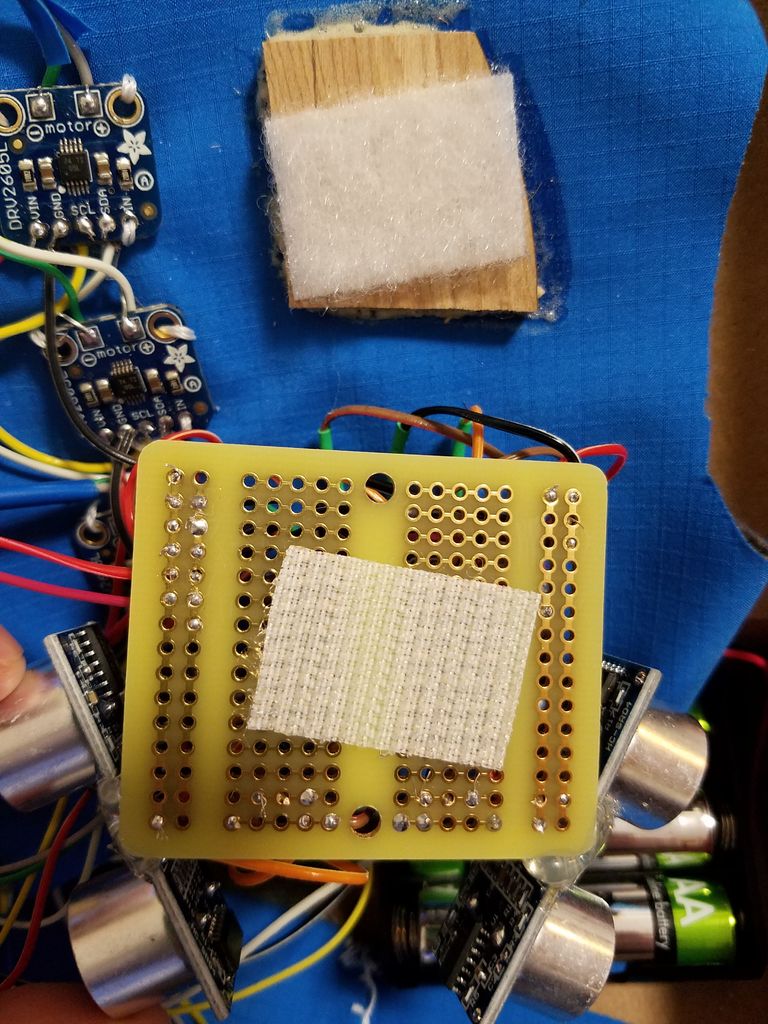
我用一些大猩猩膠將一小塊木頭粘在手套上來提升面包板,并添加了維可牢尼龍搭扣將面包板粘附到木頭上(參見上圖)。我這樣做是為了可以輕松提起并檢查短褲。
最后一步是將超聲傳感器熱粘合到凸起的面包板的任一側。
然后您就完成了!
-
可穿戴設備
+關注
關注
55文章
3817瀏覽量
167122
發布評論請先 登錄
相關推薦
TITAN Haptics推出DRAKE LFi觸覺馬達,助力緊湊型設備提升用戶體驗
觸覺傳感重磅《Nature》!無線、低功耗、多刺激模式觸覺電子皮膚(附原論文)
觸覺技術:重塑行業體驗與商業價值的創新驅動力
兩款氧氣傳感器在手套箱中的應用


一種HDJS全自動絕緣靴(手套)耐壓試驗裝置使用方法
HDJS-6智能絕緣手套(靴)耐壓試驗裝置的使用手冊

HDJS-6絕緣手套(靴)試驗裝置之安裝與使用
如何給多個X+Y(12pin),pitch0.5mm的接口的觸覺傳感器設計電路板?
支持觸覺反饋的產品設計實踐
工業機器人的觸覺傳感器有哪些?傳感器作用是什么?
觸覺智能正式成為吉林大學實習實踐基地

觸覺反饋執行器:業內首款應用于智能手機的觸覺固態按鈕驚艷CES






 工商網監
工商網監
評論