 傾角傳感器的精度分析和技術講解
傾角傳感器的精度分析和技術講解
傾角傳感器是用來測量物體相對于水平面的傾斜角度,在平臺調平,機械制造,安全防護,精密測量等眾多領域有廣泛應用,制造廠家也很多,但市面對傾角傳感器的精度的理解卻含混不清甚至存在偏差。
首先定義傾角傳感器精度:精度是指傳感器測量的角度與真實角度之間的誤差。這個誤差通常定義為均方誤差。即多次測量結果與真實值之間的均方根值。
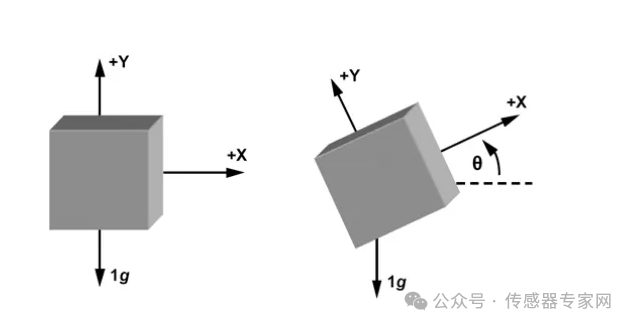
本文將以加速度傳感原理的傾角傳感器為例,來詳細描述影響傳感器的精度的因素。加速度傳感器是測量重力加速度在加速度傳感器敏感軸上的分量轉換成角度數據,即傾角值與加速度值成正弦關系。
其中g表示重力加速度,a表示加速度傳感器測量的傾角值,α是傾斜角。
影響傾角傳感器的測量精度與以下指標密切相關:
噪聲——取決于核心敏感器件的自身特性,但同時與頻率響應關聯,也稱幅頻特性。一般來說頻響越高,噪聲越大。噪聲決定了傳感器的分辨率,如果角度變化很小,以至于這種變化幾乎淹沒在噪聲中無法分辨,則我們就認為該角度變化為傾角傳感器的分辨率。
零點偏置穩定性——取決于核心敏感器件的自身特性,是指傳感器在沒有角度輸入的情況下(如絕對水平面),傳感器測量輸出不為零,該實際輸出角度值即為零點偏置。零點偏置對傳感器的精度影響并不可怕,因為零點偏置可以通過校準的方式消除。但是零點偏置通常隨著時間和溫度變化漂移,該漂移量稱為零點偏置穩定性,這種漂移通常很難消除,于是該漂移量會引起精度惡化。
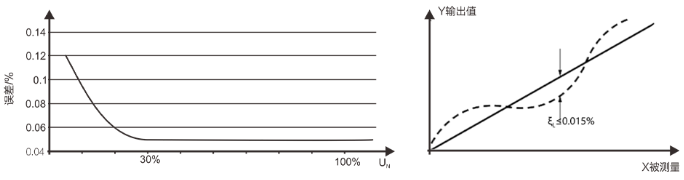
非線性——可以通過后續進行校正,取決于校正點的多少。校正點越多,非線性越好。非線性雖然可以通過后續校正方法來校正,但是非線性也同樣存在漂移現象,該漂移量也同樣無法消除從而引起精度惡化。
交叉耦合誤差——是指當傳感器在垂直于其靈敏軸方向施加一定的加速度或者傾斜一定的角度時耦合到傳感器的輸出信號上所產生的誤差。如對于測量范圍為±30°的單軸傾角傳感器(假定X方向為傾角測量方向),在空間垂直于X方向發生10°的傾斜時(此時實際被測量的X方向的傾斜角度保持不變,如為+5°),傳感器的輸出信號會因為這個10°的傾斜而產生額外誤差,這個誤差稱為交叉耦合誤差。這個額外的誤差因不同的產品而定。當傾角傳感器的交叉耦合誤差為3%FS(FS: full scale, 全量程),產生的額外誤差為3%×10°=0.3°,而傳感器實際輸出的角度簡單估算為5.3°(=5°+0.3°)。此時,即使傾角傳感器的非線性誤差達到0.01°,相對交叉耦合誤差而言,這個非線性誤差可以忽略不計,也就是說,作為傾角傳感器的測量精度,不能不將交叉耦合誤差計算在內,否則將引起很大的測量錯誤。
安裝誤差——傳感器在安裝測量時,測量軸應該與傳感器的敏感軸重合。但是在實際安裝測量時,總是無法準確的吻合。比如,安裝測量軸與傳感器敏感軸之間的夾角為1度,則測量值為實際角度變化在敏感軸上的投影。如果角度變化為30度,則測量值為30*cos(0.1)=29.995度,誤差0.005度,因此對于高精度的應用,保持測量軸和傳感器敏感軸吻合非常重要。
重復測量精度——取決于核心敏感器件的自身特性,不能通過后續修正措施來提高。
溫度對零點和靈敏度的影響——也包含漂移和溫度曲線的重復性,該重復性取決于核心敏感器件的自身特性,不能通過后續修正措施來提高。在重復性確定的情況下,可以通過后續進行校正,取決于校正點(角度點和溫度點)的多少。校正點越多,溫度漂移精度就越好。
量程——由于傾角測量與加速度之間的關系是正弦關系,所以角度測量誤差和加速度測量誤差之間滿足以下關系式:

其中dα是傾角測量誤差,da是加速度測量誤差,當量程接近90度時,加速度a接近重力加速度g,此時  接近無窮大,所以輕微的加速度誤差引起很大的傾角測量誤差。
接近無窮大,所以輕微的加速度誤差引起很大的傾角測量誤差。
由此可見,傾角傳感器的系統誤差包含了噪聲、零點偏置、重復性和溫漂的重復性,不能進行修正和補償;隨機誤差則包含了交叉耦合誤差、輸入軸非對準性、非線性、溫漂線性度,可以通過修正和補償措施來提高。因此,衡量傾角傳感器的測量精度,一定不能僅以非線性來衡量,需要將傳感器的系統誤差和隨機誤差進行誤差合成后方可。

因此,傾角傳感器誤差應該包含非線性、重復性、噪聲、零點偏置漂移,零點非線性漂移以及交叉耦合誤差等。
由于精度涉及的因素很多,所以無錫慧聯信息科技有限公司針對不同的誤差原因,一一進行排除校正,從而無需用戶對這些指標進行深入考慮,用戶只需要按照一些基本的安裝要求操作就可以滿足精度指標。這樣可以大大減少用戶的工作。
技術咨詢:慧聯科技
-
高精度
+關注
關注
1文章
543瀏覽量
25596 -
傾角傳感器
+關注
關注
3文章
277瀏覽量
25319
發布評論請先 登錄
相關推薦

激光位移傳感器精度如何提高
從入門到精通:傾角傳感器工作原理全解析,分類應用全都有
VS高精度電壓傳感器

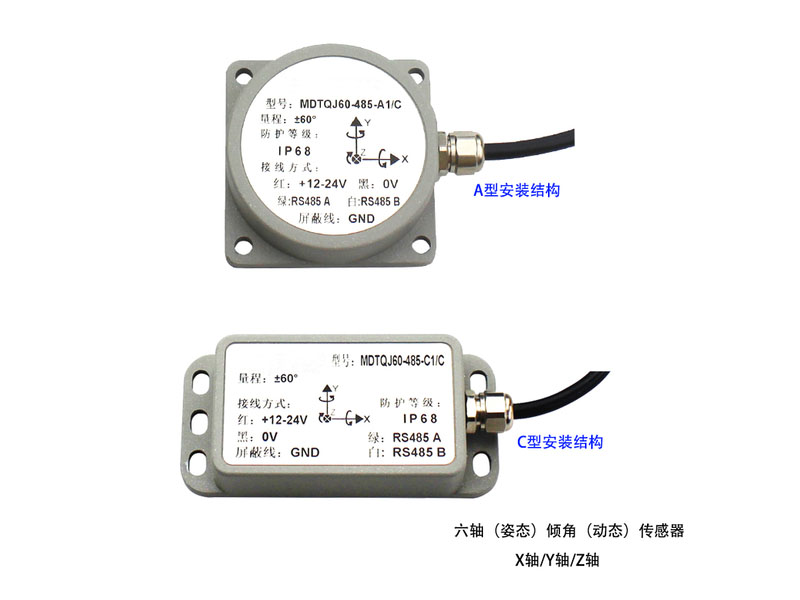
六軸姿態傾角動態傳感器
維特智能MEMS傾角傳感器溫漂,實現精準測量
壓力傳感器精度0.5和1的區別
傾角傳感器的安裝及應用
藍尊科技三軸傾角傳感器上新
無線傾角傳感器在貨架監測中的應用

無線傾角傳感器在貨架監測領域的革新應用





 工商網監
工商網監
評論