 機器手臂夾子的制作
機器手臂夾子的制作
第1步:材料清單:
3D零件
1x 623zz滾珠軸承
1x M3 15mm螺栓+墊圈
2x M3 6mm螺栓
1x M2.5 10mm
一些短橡皮筋
粘性EVA泡沫用于增加爪的抓地力
步驟2:裝配你的機器人夾具
1)從這里獲取STL文件(Thingiverse)按照指示打印它們:20%填充和PLA燈絲將完成這項工作。小心清潔零件,去除任何塑料毛刺,元件之間的任何摩擦都會使爪在移動時脫離。

2)將623zz滾珠軸承插入左釘孔。您可能需要一把小錘子來正確放置它。釘子的良好對齊將取決于您將軸承插入其通道的程度。將使用15毫米M3螺栓+墊圈將釘子固定到底座上。請參閱上面的照片以供參考

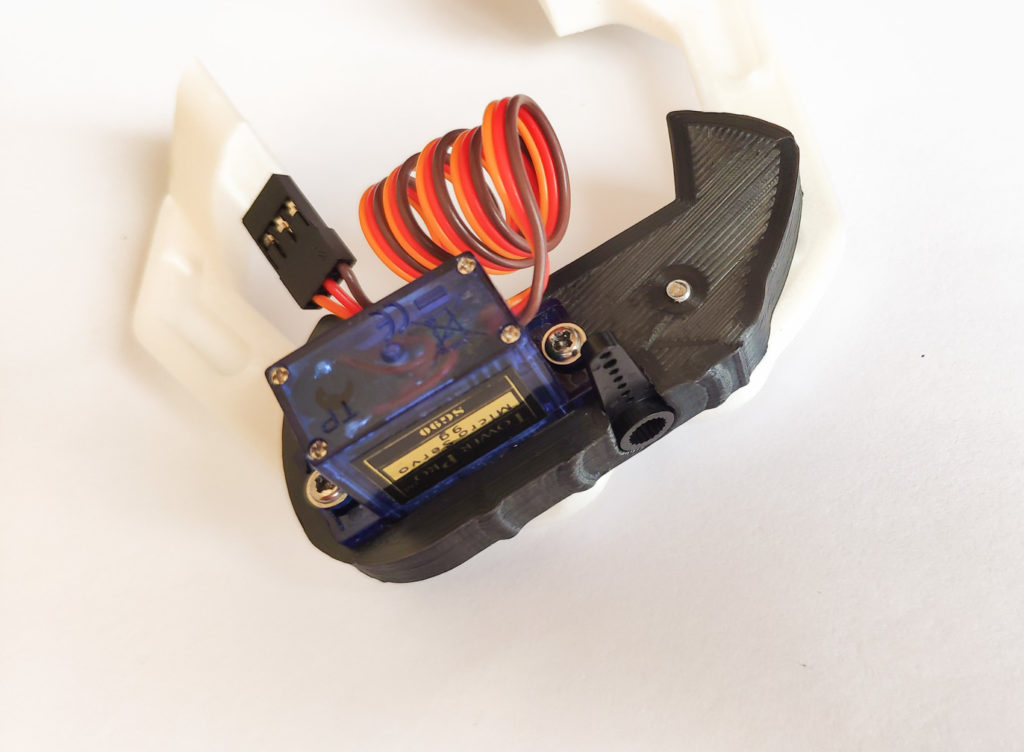
3)放置舵機。在這種情況下,我們使用兩個不同的伺服模型, SG90 (藍色)和 MG90 (黑色)。差異:齒輪,MG90有金屬齒輪,所以它會比SG90(尼龍齒輪)持續一點點。此外,MG90將顯示更少的反彈。使用伺服袋中的螺絲將其固定在機器人手柄的底座上。
使用M2.5螺栓將 WRIST 伺服固定到基座。檢查下面的照片。在基座的溝槽中插入單臂喇叭。它將在夾具的手腕旋轉期間保持伺服對準。

此照片顯示已放置指甲的機器人抓手。 此時忽略這一點。您將在稍后組裝它們
看一下上面的照片,為了放置WRIST的伺服電機,按照指示插入喇叭。

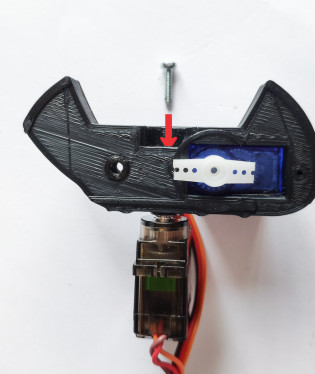
現在是時候放置機器人抓手伺服器了。注意這一步,否則,爪子將關閉或正確打開。首先,您必須找到伺服的逆旋轉角度的旋轉限制(照片1)。找到它之后,將《將喇叭拿出并將其放回原位,但如照片數字1:所示完全水平。然后,順時針旋轉它90o ,現在它已準備好接收NAIL。 剪切照片中的指示 。

抓手的當前狀態。看不到釘子
注意:此夾子設計為 3D打印。它易于打印,但是每個3D打印機制造的對象都有它的缺點。如果擰緊螺釘太多,則可能會破壞碎片或增加摩擦力。如果您注意到夾具的釘子沒有自由移動或摩擦力太大,稍微松開螺釘。

如上 所示,將釘子固定在底座上。使用伺服塑料袋內的螺釘(或使用MG90伺服時的螺栓)和帶墊圈的 M3 15mm 螺栓連接 LEFT 釘在伺服喇叭上。 請勿將它們擰得太緊,否則伺服將無需工作就可以打開和關閉夾具。所有公差非常小如果您強行使用塑料,它會彎曲增加摩擦力。
為上面/下面擰上2x M3 6mm 螺栓用于橡皮筋


EVA FOAM 《如果你想增加指甲的抓地力,建議使用/strong》。但是你可以使用你周圍的任何其他材料用于相同的目的(橡膠?)

粘貼或粘貼FOAM。你幾乎就在那里,只需將橡皮筋纏繞在螺栓頭上,你就可以開始了。

步驟3:注意:遠程控制夾具的簡單方法
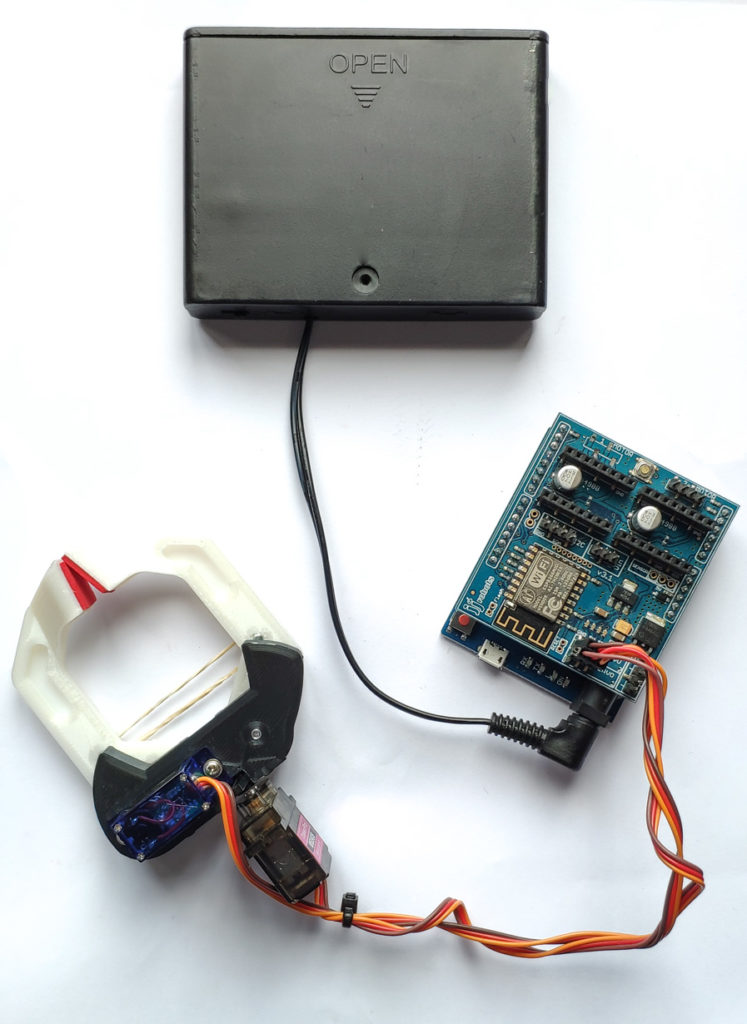
電池座(9V)和腦盾牌控制機器人抓手(+ jjRobots控制APP通過WIFI)
我們使用了大腦盾和Arduino Leonardo“組合”來控制抓手,但任何能夠移動2個伺服器的電子設備(并提供高達0.7安培每個伺服)將完成這項工作。這個夾子是與jjRobots SCARA Robotic ARM一起使用的
-
機器手臂
+關注
關注
1文章
18瀏覽量
11585
發布評論請先 登錄
相關推薦
協議幻變者:DeviceNet轉ModbusTCP網關開啟機器手臂智能新紀元

泰科機器人獲獎,開啟人形機器人關節模組新動力

變速齒輪在機器人中的使用
舵機技術深度解析,讓機器人更智能!
噴涂機器人的關鍵術語和核心參數介紹
如果設計一款桌面款的機器玩具,最吸引人的外觀與功能要有哪些?
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案

SCARA機器人中旋轉花鍵的維護和保養方法!
日本食品機器人可以與食物交流,以此改變你的味覺
自然語言控制機械臂:ChatGPT與機器人技術的融合創新(上)
二極管反向恢復電流測試方法解析






 工商網監
工商網監
評論