 關于MATLAB圖像分析在優化飛行軌跡方面的作用分析
關于MATLAB圖像分析在優化飛行軌跡方面的作用分析
在看到冥王星萌萌愛意前一年,“新視野”號探測器對機載相機拍攝的照片進行圖像處理以實現優化飛向冥王星的軌道,NASA稱這一過程為Opnav(optical navigation,光學導航)。
從2014年7月20日開始至今,“新視野”號搭載的三個科學用相機拍攝了近800張照片,并把這些照片傳送回地球,交由兩個導航團隊進行處理分析。PNAV(項目導航)團隊使用MATLAB軟件,負責主導航任務。INAV(獨立導航)團隊使用Fortran和c語言編寫進行處理。
對比兩個系統在飛越木星過程中的表現,發現PNAV和INAV導航系統效果一致,結果可靠。
飛越木星測試中的木衛十七圖像
(圖片來源:“Optical Navigation Preparations for NewHorizons Pluto Flyby”)
圖像分析和優化應用于導航
圖像處理和優化方法用于及時確定冥王星及其衛星的精確位置,可以盡早完成對航向的精確修正,并為“新視野”號之后的飛行節省很多燃料。
決定冥王星軌跡的三大挑戰:
當探測器離目標很遠時,拍攝的低分辨率照片限制了計算精度;
冥王星的大小、形狀和表面亮度變化及其衛星并不為我們熟知,在計算時需要考慮誤差和補償;
在計算時需要考慮光速,探測器運動的影響,以及相機拍攝時的指向漂移;
MATLAB SPICE工具包
PNAV團隊使用MATLAB版本的NASASPICE工具包完成通過圖像處理實現對探測器飛行軌跡的優化。
這一工具包在多行星任務中用于確認:
探測器的位置;
探測器及其儀器的指向;
觀察目標的位置、大小、形狀和方向;
探測器或地面上可能會影響科學觀測的事件;
主要導航分析步驟
確定前往冥王星的最佳路徑需要三個步驟:
找到視野中心的星并與天文星表匹配;
確定探測器的姿態和指向;
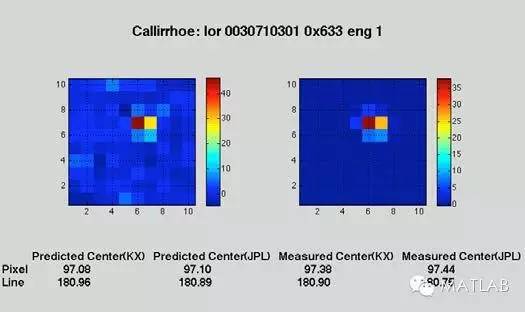
尋找觀測目標 (冥王星及其衛星) 的中心;
冥王星和卡戎星拍攝圖像(拍攝時間:2015年4月12-18日)
首先,通過匹配濾波處理將天文圖表與拍攝照片相匹配,找出所攝視野方位;再由圖像配準技術確定探測器姿態,補償在拍攝圖像時探測器x和y方向上的漂移和旋轉;然后,通過搭建目標模型與拍攝圖像的互相關性尋找目標(冥王星及其衛星)中心。隨著探測器的不斷靠近,冥王星的大小,形狀,及其衛星的表面亮度的變化數據不斷更新,目標模型也就更加精準,最終完成對“新視野”號探測器的路徑導航優化。
其中PNAV團隊基于圖像處理的算法使用MATLAB以及SPICE工具包完成計算,而INAV團隊則基于非線性最小二乘算法,使用Fortran和C語言編寫實現對“新視野”號的導航。
與其他使用兩個獨立導航程序的系統一樣,“新視野”號探測器導航系統的每一個分析步驟都使用兩種的算法計算,并相互檢驗以保證計算結果的精準無誤。
-
探測器
+關注
關注
14文章
2642瀏覽量
73039 -
光速
+關注
關注
0文章
10瀏覽量
7902 -
圖像分析
+關注
關注
0文章
82瀏覽量
18679
發布評論請先 登錄
相關推薦
求LabVIEW程序代做,關于噪聲測量方面,需要matlab與labview混合編程,涉及優化算法、PID控制等,可帶價聯系
AI在環境可持續發展方面的作用
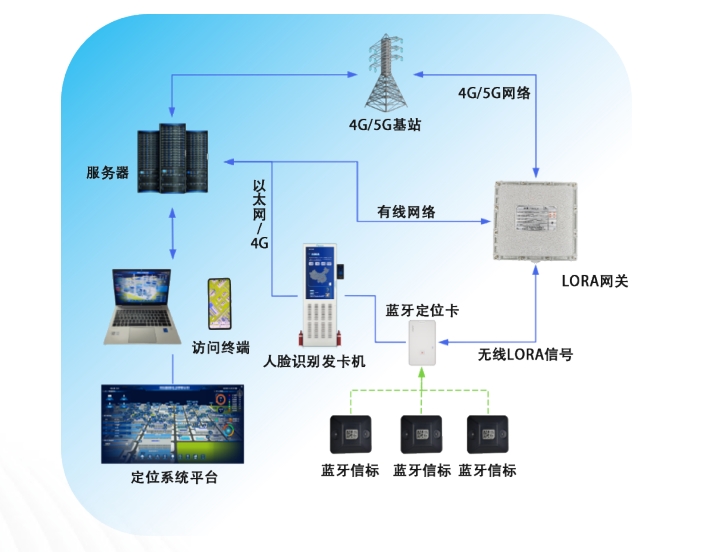
人員定位及軌跡管理技術原理及應用領域





 工商網監
工商網監
評論