 基于視覺的交通標識牌檢測與識別
基于視覺的交通標識牌檢測與識別
一、要求
首先要明確一下本文到底是要干什么。本文要完成基于視覺的交通標識牌檢測與識別,說白了,就兩個事:1)在一張圖中找到交通標識牌在哪里(檢測);2)認清楚這個標識牌是啥,表達的什么意思(識別)。那么最后得到的結果預覽如下:
二、使用數據
交通標識牌種類數不勝數,我國的交通標志一共有一百余種,按類別可分為黃底黑邊的警告標志、白底紅圈的禁令標志、藍底白字的指示標志,形狀上以三角形、圓形和矩形為主。本文主要是為了介紹一下交通標識牌的識別流程和一些主要方法的實現,為了簡化工作,本文挑選了以下五類交通標識牌。
可以看出來,博主用心良苦,選擇的交通標識牌具有很清楚的特征:1)顏色上,這五類交通標識牌的外邊框都是紅色的;2)形狀上,標識牌都是標準的圓形。這事實上也表明了,交通標識牌具有著鮮明的特征,故無論是人眼還是機器,都較易識別。(其他種類的交通標志牌也是一樣,利用形狀和顏色特征來處理)
三、使用方法
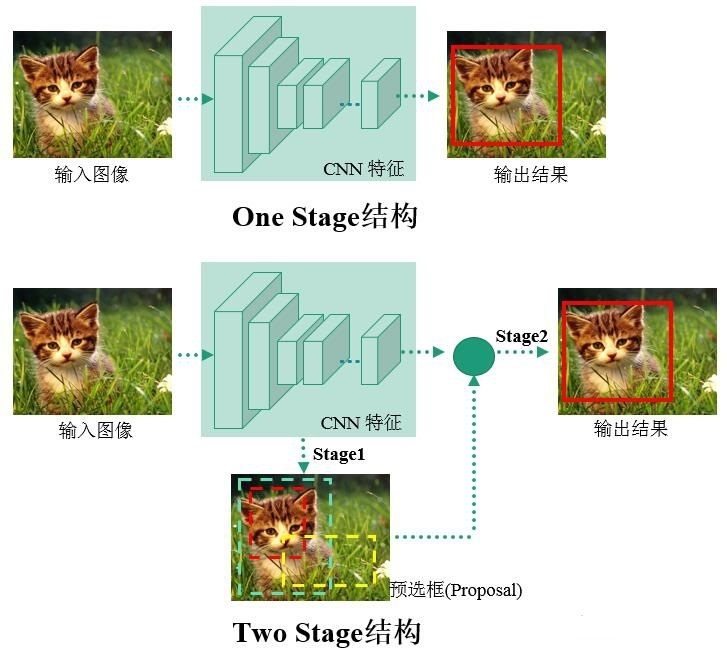
在我看來,目前處理交通標牌識別的主要有兩種方法,1)傳統的圖像處理+機器學習辦法;2)最近很火的深度學習。那么本文采用的是前者,后者后續再進行介紹。
1>檢測:顏色和形狀。
交通標志牌為了起到其警示作用,在顏色和形狀上都有著易區分性,如本文所討論的五類標志牌,顏色特征為外框均為鮮艷的紅色;形狀特征為均為圓形。于是,檢測的思路如下,最終得到了圓形部分的交通標牌:
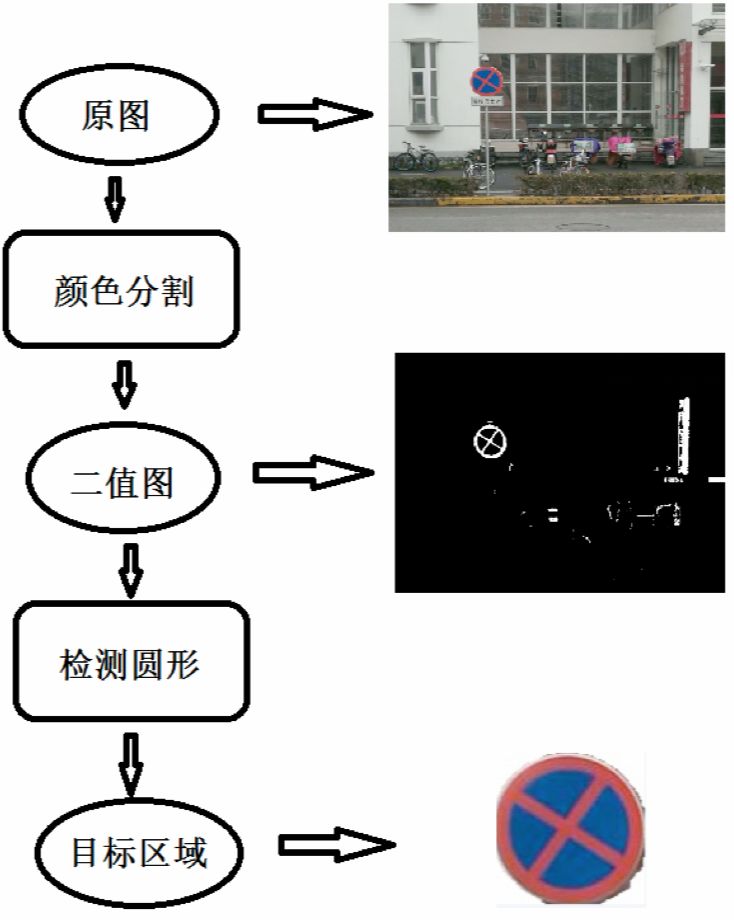
接下來,主要分為顏色分割和形狀檢測兩部分進行討論:
基于顏色分割的圖像二值化處理:
最直觀、簡單的是利用RGB顏色空間來描述圖像的色彩情況,但是,RGB色彩空間極易受到光線情況的影響,魯棒性并不是很好,所以在相關論文中,你會發現,很少有人直接使用RGB色彩空間進行色彩分割。而實際上,本人拿有限的樣本和測試集進行測試,RGB色彩分割效果在圖像成像質量較理想的時候效果極佳,但是的確容易受到干擾。本文此處選擇了HSI色彩空間模型進行色彩分割。先來點理論知識:
色調H(Hue):與光波的波長有關,它表示人的感官對不同顏色的感受,如紅色、綠色、藍色等,它也可表示一定范圍的顏色,如暖色、冷色等。
飽和度S(Saturation):表示顏色的純度,純光譜色是完全飽和的,加入白光會稀釋飽和度。飽和度越大,顏色看起來就會越鮮艷,反之亦然。
亮度I(Intensity):對應成像亮度和圖像灰度,是顏色的明亮程度。
從理論上看,HSI色彩空間將飽和度和亮度信息獨立了出來,這樣一定程度上就降低了光線帶來的影響。聽上去很有道理,但是,實際上,這也僅僅是一定程度上降低了亮度和色彩的耦合關系,并不是完全地進行了解耦,所以,效果會有提升,但是很難帶來質的改變(這是筆者自己的體驗,也許是筆者能力不足,實現得不是很理想)
那么從RGB色彩空間轉換到HSI空間的轉換公式如下:
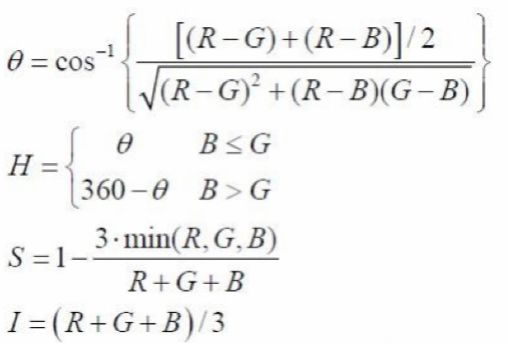
函數RGB2HSI是將RGB色彩空間轉換到HSI色彩空間,其轉換的過程參照式(2.2),最后將飽和度S和強度I均放大100倍,便于操作。 最后得到的H、 S、 I的取值范圍分別為[0,360]、 [0,100]、 [0,100]。
Cpp代碼
voidRGB2HSV(doublered,doublegreen,doubleblue,double&hue,double&saturation,
double&intensity)
{
doubler,g,b;
doubleh,s,i;
doublesum;
doubleminRGB,maxRGB;
doubletheta;
r=red/255.0;
g=green/255.0;
b=blue/255.0;
minRGB=((r
minRGB=(minRGB
maxRGB=((r>g)?(r):(g));
maxRGB=(maxRGB>b)?(maxRGB):(b);
sum=r+g+b;
i=sum/3.0;
if(i<0.001?||?maxRGB-minRGB<0.001?)??
{
h=0.0;
s=0.0;
}
else
{
s=1.0-3.0*minRGB/sum;
theta=sqrt((r-g)*(r-g)+(r-b)*(g-b));
theta=acos((r-g+r-b)*0.5/theta);
if(b<=g)??
h=theta;
else
h=2*PI-theta;
if(s<=0.01)??
h=0;
}
hue=(int)(h*180/PI);
saturation=(int)(s*100);
intensity=(int)(i*100);
}
在得到HSI空間的基礎上,分割出紅色像素,事實上這個閾值最好時自己調出來,無論是基于哪個色彩空間,網上的代碼或者論文中的數值都是個參考,自己調出來的才靠譜嘛,代碼如下:
Cpp代碼
//得到圖像參數
intwidth=src.cols;//圖像寬度
intheight=src.rows;//圖像高度
//色彩分割
doubleB=0.0,G=0.0,R=0.0,H=0.0,S=0.0,I=0.0;
MatMat_rgb=Mat::zeros(src.size(),CV_8UC1);
intx,y,px,py;//循環
for(y=0;y
{
for(x=0;x
{
//獲取BGR值
B=src.at(y,x)[0];
G=src.at(y,x)[1];
R=src.at(y,x)[2];
RGB2HSV(R,G,B,H,S,I);
//紅色:337-360
if((H>=337&&H<=360||H>=0&&H<=10)&&??
S>=12&&S<=100&&V>20&&V<99)??
{
Mat_rgb.at(y,x)=255;//分割出紅色
}
}
}
分割效果可見如下組圖,由近至遠:
注意:有一個很嚴肅的問題我這里沒有提,那就是圖像預處理!做圖像處理的很重要的一個步驟就是圖像預處理,預處理做好了,后面的問題復雜度也就降低了許多。實際上,用顏色分割來二值化圖像也可以看作一種預處理。那么顏色分割之前有不有必要做圖像預處理呢?是有的。舉個例子,我那我的MATE8在學校里拍了一張照,然后使用手機相機自帶的功能,調整其色彩飽和度,亮度等,得到以下兩種圖片:
相機拍的原圖
手機調整飽和度、亮度后
這兩種圖片,顯然右邊的將更有利于顏色分割!(不信可以試試哦)。本文主要以介紹交通標牌的主要流程為主,預處理的方法包括直方圖均衡化、白平衡、亮度調節等等這些就不仔細糾結了,但是,不代表這部分不重要,圖像預處理往往一定程度上決定了最后的效果。
基于形狀(圓形)檢測的ROI提取
在進行顏色分割之后,得到的只是一個粗略的交通標志牌ROI區域, 還會留下一些噪聲以及一些和目標區域面積相當或者比目標面積略大的區域,這時候就還需要進行一些圖像預處理,為準確檢測交通標志牌打下堅實基礎。由于交通標志最明顯的特征是其顏色和形狀,在用顏色分割之后,我們可以通過形狀特征來去除其余的干擾。對于本文的研究對象而言,交通標志牌的形狀為圓形,可以采用經典的Hough變換進行圓檢測,該方法準確性高,但是計算量大,耗時且占用較大內存;也可以采用圓度的方法來提取圓形,該方法原理簡單,計算量小,準確率高。綜合考慮,本文使用基于圓度的圓檢測算法。大概流程如下,后文還會詳細介紹:
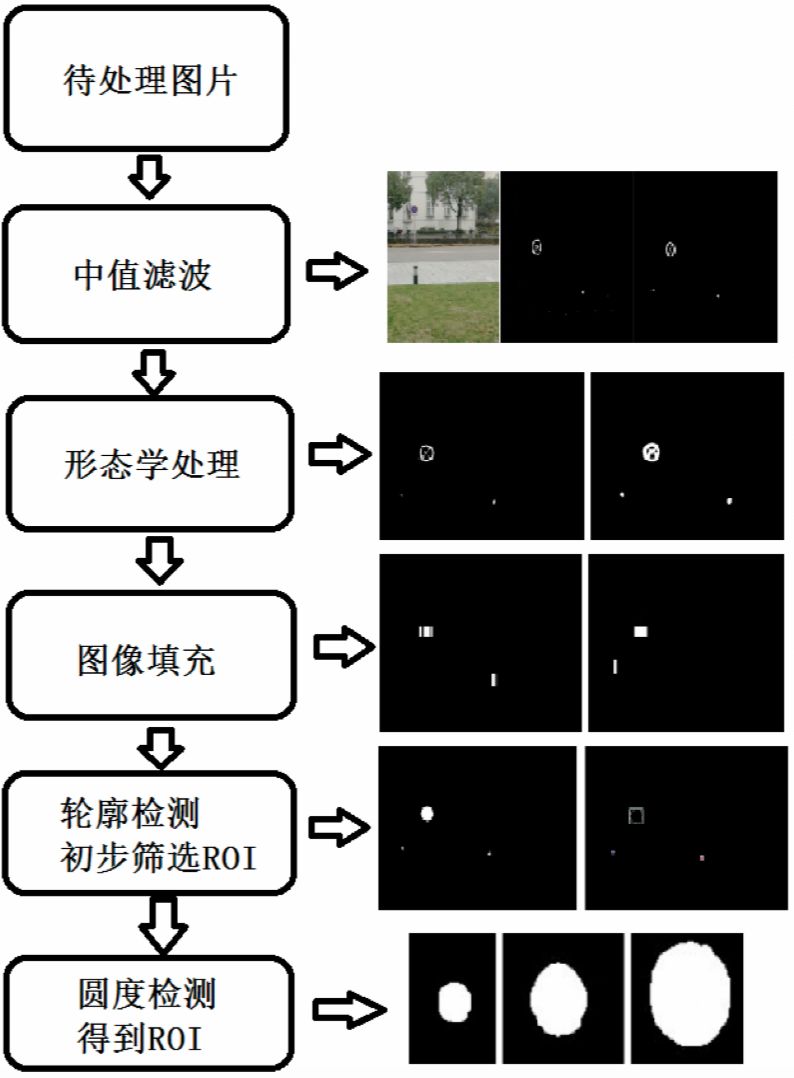
圖有點不太清楚,下文中對于關鍵的部分會再次給出效果圖。
中值濾波,這個沒啥好說的,圖上效果不是很明顯,但是實際上可以一定程度上濾掉單個噪點,對得到準確的結果會有一定的幫助;
形態學處理,最后我們的目的是要得到一個封閉的區域,所以,顏色分割后的結果很可能不會是比較理想封閉的圓形,那么選用的3×3腐蝕模板,7×7膨脹模板,這樣檢測到的圓形將基本不會產生缺口,保證是一個封閉的形狀。
圖像填充,有了上述步驟得到的封閉圓形,我們接下來就可以填充封閉圖形了(這里你可能會問,為啥要這樣做。實際上直接進行Hough圓檢測可以得到ROI結果,但是本文是換了一個思路,使用圓度來判斷圓形,所以算法需要一個實心區域),代碼如下:
Cpp代碼
voidfillHole(constMatsrcBw,Mat&dstBw)
{
Sizem_Size=srcBw.size();
MatTemp=Mat::zeros(m_Size.height+2,m_Size.width+2,srcBw.type());//延展圖像
srcBw.copyTo(Temp(Range(1,m_Size.height+1),Range(1,m_Size.width+1)));
cv::floodFill(Temp,Point(0,0),Scalar(255));//填充區域
MatcutImg;//裁剪延展的圖像
Temp(Range(1,m_Size.height+1),Range(1,m_Size.width+1)).copyTo(cutImg);
dstBw=srcBw|(~cutImg);
}
輪廓檢測,初步篩選ROI,要想使用基于圓度的圓檢測算法,則需要從圖像中提取初步的ROI來進行篩選。這里使用輪廓檢測法來檢測圖片中的ROI區域。可以看到,一些細小的噪聲也被檢測進來。
所以,本文先通過對檢測區域的寬高比、面積大小進行限制,篩選出有效的檢測區域,經過實驗,可以確定寬高比限制在0.5-2之間,面積最小值設定為400,可以進一步得到下圖的檢測效果,可以看到,此時小面積的噪聲已經被排除。
代碼如下:
Cpp代碼
//找輪廓
vector>contours;
vectorhierarchy;
findContours(Mat_rgb,contours,hierarchy,CV_RETR_EXTERNAL,
CV_CHAIN_APPROX_SIMPLE,Point(0,0));
///多邊形逼近輪廓+獲取矩形和圓形邊界框
vector>contours_poly(contours.size());
vectorboundRect(contours.size());
vectorcenter(contours.size());
vector
//得到輪廓矩形框
for(inti=0;i
{
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
boundRect[i]=boundingRect(Mat(contours_poly[i]));
minEnclosingCircle(contours_poly[i],center[i],radius[i]);
}
///畫多邊形輪廓+包圍的矩形框
Matdrawing=Mat::zeros(Mat_rgb.size(),CV_8UC3);
for(inti=0;i
{
Rectrect=boundRect[i];
//首先進行一定的限制,篩選出區域
//高寬比限制
floatratio=(float)rect.width/(float)rect.height;
//輪廓面積
floatArea=(float)rect.width*(float)rect.height;
floatdConArea=(float)contourArea(contours[i]);
floatdConLen=(float)arcLength(contours[i],1);
if(dConArea<400)//ROI?區域面積限制??
continue;
if(ratio>2||ratio<0.5)//ROI?區域寬高比限制??
continue;
//檢測到了!
Scalarcolor=Scalar(rng.uniform(0,255),rng.uniform(0,255),rng.uniform(0,255));
//繪制輪廓和檢測到的輪廓外接矩形
drawContours(drawing,contours_poly,i,color,1,8,vector(),0,Point());
rectangle(drawing,boundRect[i].tl(),boundRect[i].br(),color,2,8,0);
rectangle(src,boundRect[i].tl(),boundRect[i].br(),color,2,8,0);
}
圓度算法檢測,實際上這是利用了非常簡單的數學約束,來對檢測到的區域進行圓形驗證。圓度定義如下:
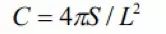
其中,S為圓的面積,L為圓的周長,C為圓度。圓度值越接近1,則表示該圖形與圓形的契合程度越高。經過大量的實驗,可以得出圓度大于0.5時,即 4 . 0 ? C 時,可以篩選出巨大部分的圓形。
ROI區域無效像素面積約束,這是進一步確定篩選后的ROI區域是目標圓形區域。該約束條件是基于ROI區域中圓形的缺失面積而得到的。前文中得到的ROI區域是包含圓形交通標志牌的矩形區域,如下圖所示,可以將整個ROI區域分成1、2、3、4四塊,其中紅色部分為交通標志牌,灰色部分為ROI區域中的無效像素。可以直觀地看到,1、2、3、4四塊的無效像素滿足一定的數學關系,
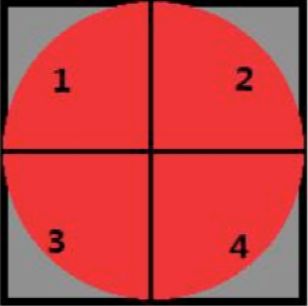
有如下約束
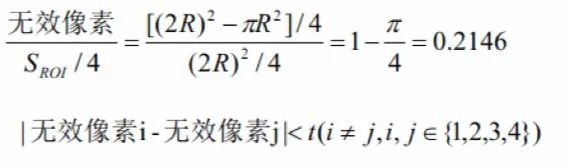
圓度代碼即為一個約束條件,對面個輪廓檢測得到的ROI進行驗證,無效像素面積約束則代碼如下:
Cpp代碼
boolisCircle(constMatsrcBw,Mat&mytemp)//(待改進)
{//輸入的是一個灰度圖像
Mattemp=Mat::zeros(srcBw.size(),CV_8UC1);;
booliscircle=false;
//獲得srcBw信息
intw=srcBw.cols;
inth=srcBw.rows;
intcount1=0;//各部分的缺失像素計數器
intcount2=0;
intcount3=0;
intcount4=0;
//將srcBw平均分成四份,進行訪問缺失的像素個數、所占比重
//先訪問左上
for(inti=0;i
{
for(intj=0;j
{
if(srcBw.at(i,j)==0)
{
temp.at(i,j)=255;
mytemp.at(i,j)=255;
count1++;
}
}
}
//右上
for(inti=0;i
{
for(intj=w/2-1;j
{
if(srcBw.at(i,j)==0)
{
temp.at(i,j)=255;
mytemp.at(i,j)=255;
count2++;
}
}
}
//左下
for(inti=h/2-1;i
{
for(intj=0;j
{
if(srcBw.at(i,j)==0)
{
temp.at(i,j)=255;
mytemp.at(i,j)=255;
count3++;
}
}
}
//右下
for(inti=h/2-1;i
{
for(intj=w/2-1;j
{
if(srcBw.at(i,j)==0)
{
temp.at(i,j)=255;
mytemp.at(i,j)=255;
count4++;
}
}
}
floatc1=(float)count1/(float)(w*h);//左上
floatc2=(float)count2/(float)(w*h);//右上
floatc3=(float)count3/(float)(w*h);//左下
floatc4=(float)count4/(float)(w*h);//右下
cout<
<
//限定每個比率的差值范圍
if((c1>0.037&&c1<0.12)&&(c2>0.037&&c2<0.12)&&(c2>0.037&&c2<0.12)&&(c2>0.037
&&c2<0.12))??
{
//限制差值,差值比較容錯,相鄰塊之間差值相近,如左上=右上&&左下=右下或左上=左下&&右上=右下
if((abs(c1-c2)<0.04&&abs(c3-c4)<0.04)||(abs(c1-c3)<0.04&&abs(c2-c4)<0.04))??
{
iscircle=true;
}
}
returniscircle;
}
利用輪廓檢測、圓度約束和無效面積約束,可以測試得到如下效果圖,
最后,目標區域提取的效果如下:
2>識別:SVM分類。
有了上文提取ROI的基礎,分類過程實際上和我之前寫過的箭頭分類如出一轍。
圖像預處理,首先將無效像素全部去除,只留下圓形ROI有效區域
然后進行二值化處理,二值化后的圖像特征更為清晰
可以選擇所有像素作為特征,當然更科學的是Hu不變矩、Zernike不變矩、二者混合矩等特征。關于Hu、Zernike特征的代碼網上比比皆是,這里僅推薦一個作為參考。本文為了簡單實現框架,拿全部像素特征進行訓練。準備好樣本和測試集,并給這五類交通標牌設置標簽“stop”,“20t”,“car forbidden”,“5”,“stop2”
SVM代碼框架如下。
SVM訓練
Cpp代碼
//*********************SVM訓練部分***********************
//準備開始訓練
CvSVMclassifier;
SVM_params.kernel_type=CvSVM::LINEAR;//使用RBF分類非線性問題
SVM_params.svm_type=CvSVM::C_SVC;
SVM_params.degree=0;
SVM_params.gamma=0.01;
SVM_params.term_crit=cvTermCriteria(CV_TERMCRIT_ITER,1000,FLT_EPSILON);
SVM_params.C=100;
SVM_params.coef0=0;
SVM_params.nu=0;
SVM_params.p=0.005;
classifier.train(train,labels,Mat(),Mat(),SVM_params);//SVM訓練,線性核上述參數C起作用
SVM保存
Cpp代碼
classifier.save("model180.txt");
SVM讀取
Cpp代碼
//這里載入分類器,方便直接訓練
CvSVMclassifier;
classifier.load("model180.txt");
SVM預測
Cpp代碼
for(inti=0;i
{
intresult=(int)classifier.predict(testdata[i]);
std::cout<<"測試樣本"<"的測試結果為:"??
<"?"?<
}
最后得到了文中開始展示的效果。
本文完整代碼和數據,已托管在Github上https://github.com/lps683/TrafficsSignDetection。這些東西也許在高手看來不值一提,但是,若能給一部分人帶來一些哪怕一點點收獲,那么花這么多功夫寫這篇文章也不算白費。
-
圖像采集
+關注
關注
2文章
301瀏覽量
41299 -
智能汽車
+關注
關注
30文章
2870瀏覽量
107385 -
交通標志識別
+關注
關注
0文章
4瀏覽量
3309
發布評論請先 登錄
相關推薦
安全標識牌|夜光標識|管道標識|反光膠帶|警示膠帶
基于圖像輪廓識別技術在交通路標識別應用
基于SIFT視覺詞匯的目標識別算法

交通標志牌檢測算法
凸版印刷使用全彩電子紙顯示器出世界上第一款數字POP標識牌
基于YOLO改進的輕量級交通標識檢測模型

機器視覺常用的3種目標識別方法
淺談機器視覺檢測技術和機器視覺定位技術
RFID標識牌手持識別終端簡介
機器視覺的圖像目標識別方法操作要點
機器視覺的圖像目標識別方法綜述






 工商網監
工商網監
評論