使用專門的MCU簡化運動控制設計
大小:0.33 MB 人氣: 2017-05-09 需要積分:0
使用專門的MCU簡化運動控制設計
?
數字運動控制方法提供精確的機器人和致動器的驅動端部效應器在機器人系統的運動和定位的調節。然而,在實踐中,工程師開發基于傳統的比例積分(PI)控制器的運動控制系統通常會發現他們的項目停滯不前,因為他們掙扎調整敏感的控制器參數。一個更有效的方法降低了調諧的復雜性,同時提供穩定的性能,在寬范圍的操作條件。
?
低成本,高性能的微控制器已經推動了數字電機控制的迅速出現,能夠通過軟件控制響應廣泛的操作條件。通過設計PI控制器的軟件,工程師可以創建高響應的電機控制系統的最低數量的組件。然而,在實踐中,找到最佳的PI控制器參數設置顯著的挑戰。很多時候,工程師們發現,每個電機的獨特特性(以及相關的電機控制系統的實施)顯著復雜的任務,以確保穩定運行的電機在不同的速度和負載。因此,電機控制開發團隊發現自己被迫延長項目進度和解決微妙的調整問題。
?
?
PI controller challenges
?
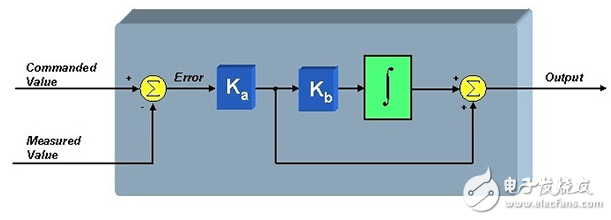
A conventional PI controller uses a control loop that generates an output intended to reduce the error between intended values and measured values in some process. In the serial form of the control loop (Figure 1), Kb sets the zero of the PI controller while Ka sets the bandwidth of the closed-loop system response.
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
使用專門的MCU簡化運動控制設計下載
相關電子資料下載
- 貼片式SD卡功能介紹【MK SD NAND】 54
- 瑞薩RX MCU功能安全解決方案簡介(3)Self-Test自檢軟件包 484
- 瑞薩RX MCU功能安全解決方案簡介 硬件參考板 222
- 瑞薩RX MCU功能安全解決方案簡介 參考文檔 155
- “萬能管腳”拯救停產料 42
- 基于瑞薩MCU RA6M5的給藥系統解決方案 120
- 芯海科技車規MCU芯片CS32F036Q榮獲IAEIS 2024“年度汽車電子科學技術獎” 39
- 愛普特攜新品亮相寧波家電展會,助力智能家電產業全芯升級 134
- 14年增長10倍!中國汽車半導體市場增長迅猛,英飛凌汽車芯片助力汽車新品上 1951
- 凌鷗創芯空調外機解決方案支持市場上主流的家用/商用空調外機 306