乘著自動(dòng)駕駛的東風(fēng),激光雷達(dá)在最近兩年攢足了風(fēng)頭,各種融資上市消息蜂擁而至。2020年被稱為“自動(dòng)駕駛元年”,海外激光雷達(dá)公司在這一年迎來了上市熱潮,包括實(shí)時(shí)環(huán)視激光雷達(dá)的發(fā)明者Velodyne在內(nèi),目前已經(jīng)有5家激光雷達(dá)公司在美股上市。
2021-10-06 08:47:00 20051
20051 激光SLAM局部定位精度高但全局定位能力差且對(duì)環(huán)境特征不敏感,而視覺SLAM全局定位能力好但局部定位相對(duì)激光雷達(dá)較差,兩者融合可以提高SLAM系統(tǒng)的精度和魯棒性。
2023-10-23 11:01:14650 
LiDARInnovizPro、S3、SLAM on Chip、VLS-128。激光雷達(dá)是自動(dòng)駕駛系統(tǒng)中一個(gè)非常重要的組件。在許多傳統(tǒng)供應(yīng)商和新創(chuàng)公司看來,未來自動(dòng)駕駛汽車在障礙探測(cè)和 SLAM(實(shí)時(shí)定位和地圖構(gòu)建
2018-07-26 20:45:02
結(jié)合激光雷達(dá)或者攝像頭的方法,讓掃地機(jī)可以高效繪制室內(nèi)地圖,智能分析和規(guī)劃掃地環(huán)境,成功讓自己步入了智能導(dǎo)航的陣列。除了掃地機(jī)之外,SLAM技術(shù)在其他服務(wù)機(jī)器人(例如商場(chǎng)導(dǎo)購機(jī)器人、銀行機(jī)器人
2018-12-06 10:25:32
使用的主流技術(shù)。激光測(cè)距相比較于圖像和超聲波測(cè)距,具有良好的指向性和高度聚焦性,是目前最可靠、穩(wěn)定的定位技術(shù)。激光雷達(dá)傳感器獲取地圖信息,構(gòu)建地圖,實(shí)現(xiàn)路徑規(guī)劃與導(dǎo)航。 無人駕駛 無人駕駛是近年來較火的話
2020-12-01 14:26:37
研究生期間進(jìn)行了基于2D激光雷達(dá)的SLAM的研究,當(dāng)時(shí)主要做了二維激光雷達(dá)的數(shù)據(jù)處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機(jī)會(huì),決定正式邁出第一步,徹底進(jìn)入SLAM的坑!心中
2021-08-30 06:13:31
`我們已經(jīng)對(duì)單線激光雷達(dá)司空見慣,其旋轉(zhuǎn)線掃的測(cè)量方式導(dǎo)致造成壽命問題和價(jià)格居高不下。 因此,北醒研發(fā)了CE30,它是一款具有大視場(chǎng)角的固態(tài)激光雷達(dá)。它可同時(shí)輸出132°水平視場(chǎng)、9度垂直視場(chǎng)范圍內(nèi)
2018-01-11 09:21:13
想了解行業(yè)國內(nèi)做固態(tài)激光雷達(dá)的廠家,激光雷達(dá)里面是怎么樣的啊
2021-01-17 15:29:39
了概念階段,發(fā)展到了對(duì)各項(xiàng)技術(shù)的積極研究當(dāng)中。而其中的某些技術(shù),已經(jīng)成為科技公司和汽車企業(yè)都表示“必須拿下”的關(guān)鍵所在,比如激光雷達(dá)。激光雷達(dá)有多重要?顧名思義,激光雷達(dá)就是以發(fā)射激光束探測(cè)目標(biāo)的位置
2017-10-20 15:49:06
激光雷達(dá)實(shí)際上是一種工作在光學(xué)波段(特殊波段)的雷達(dá),它的優(yōu)點(diǎn)非常明顯:1、具有極高的分辨率:激光雷達(dá)工作于光學(xué)波段,頻率比微波高2~3個(gè)數(shù)量級(jí)以上,因此,與微波雷達(dá)相比,激光雷達(dá)具有極高的距離
2017-09-19 15:51:15
lidar_camera_calibration項(xiàng)目——激光雷達(dá)和相機(jī)聯(lián)合標(biāo)定
2019-04-12 09:27:38
Braking(AEB)AEB 是一種汽車主動(dòng)安全技術(shù),主要由 3 大模塊構(gòu)成,其中測(cè)距模塊的核心包括微波雷達(dá)、激光雷達(dá)和視頻系統(tǒng)等,它可以提供前方道路安全、準(zhǔn)確、實(shí)時(shí)的圖像和路況信息。AEB 系統(tǒng)采用雷達(dá)
2017-10-18 17:18:24
認(rèn)為是 L3 級(jí)及以上自動(dòng)駕駛必備傳感器。激光雷達(dá)兼具測(cè)距遠(yuǎn)、角度 分辨率優(yōu)、受環(huán)境光照影響小的特點(diǎn),且無需深度學(xué)習(xí)算法,可直接獲得物體的距離和 方位信息。這些相較于其他傳感器的優(yōu)勢(shì),可顯著提升自動(dòng)駕駛
2021-03-18 11:14:17
漸漸覺得激光雷達(dá)是非常重要的。從左邊看,這是一個(gè)傳感器的輸入,如激光雷達(dá)、攝像頭、毫米波、GPS、編碼器和 IMU。這些傳感器的數(shù)據(jù)輸入到系統(tǒng)的感知算法里,對(duì)于這個(gè)感知算法,我們會(huì)將這些數(shù)據(jù)進(jìn)行處理分析
2017-09-08 17:24:48
點(diǎn)擊上方“AI算法修煉營”,選擇“星標(biāo)”公眾號(hào)精選作品,第一時(shí)間送達(dá)這篇文章是激光雷達(dá)點(diǎn)云數(shù)據(jù)分割算法的嵌入式平臺(tái)上的部署實(shí)現(xiàn)。主要的創(chuàng)新點(diǎn)有兩點(diǎn):一是利用多路分支采用不同分辨率輸入后再...
2021-12-21 08:28:22
激光信號(hào),就需要有更優(yōu)異的處理算法和光學(xué)調(diào)校。 傳統(tǒng)受限于原理,三角測(cè)距法的激光雷達(dá)都會(huì)給大家一種完全無法抗擊環(huán)境光照的印象,更不提在室外可以工作的可能性了。 不過,對(duì)于RPLIDAR而言并不是如此
2018-02-07 13:40:27
`最近突然對(duì)機(jī)器人距離探測(cè)設(shè)備感興趣就打算著手做個(gè)激光雷達(dá)玩玩。。。。可以在設(shè)計(jì)方案的時(shí)候發(fā)現(xiàn)角度信息很難解決。多以想看看大家有沒有做過這方面的。幫忙想下。。。。如果哪位土豪家里有掃地機(jī)器人可以拆下,,,,,給大家介紹下,,,哈哈哈。。。。哪位大神如果做過,,,能不能幫幫偶。。。`
2016-04-16 17:45:28
行業(yè)的興起,激光測(cè)距雷達(dá)已成為機(jī)器人體內(nèi)不可或缺的核心部件,配合SLAM技術(shù)使用,可幫助機(jī)器人進(jìn)行實(shí)時(shí)定位導(dǎo)航,,實(shí)現(xiàn)自主行走。思嵐科技研制的rplidar系列配合slamware模塊使用是目前服務(wù)機(jī)器人
2020-07-14 07:56:45
比對(duì)上一幀和下一幀環(huán)境的變化可以較為容易的探測(cè)出周圍的車輛和行人。2.SLAM加強(qiáng)定位。激光雷達(dá)另一大特性是同步建圖(SLAM),實(shí)時(shí)得到的全局地圖,通過與高精度地圖中特征物的比對(duì),可以實(shí)現(xiàn)導(dǎo)航及加強(qiáng)
2017-10-16 16:31:32
激光雷達(dá)距離像背景抑制算法研究相干激光成像雷達(dá)距離像處理的一個(gè)重要內(nèi)容就是進(jìn)行背景抑制。利用原始強(qiáng)度像的均值信息進(jìn)行距離像的背景抑制因?yàn)閺?qiáng)度像受到噪聲影響而效果不佳,改進(jìn)算法加入了強(qiáng)度像的噪聲濾除
2009-08-08 09:40:21
在很多人印象中激光雷達(dá)還是那個(gè)通過旋轉(zhuǎn)完成激光測(cè)距幫助機(jī)器人完成定位、建圖輔助后續(xù)導(dǎo)航的激光傳感器RPLIDAR定位建圖 但其實(shí),除了可以應(yīng)用在機(jī)器人定位建圖、自主導(dǎo)航、障礙物檢測(cè)與規(guī)避等領(lǐng)域外他
2018-05-11 15:33:44
機(jī)遇激光雷達(dá)在智能機(jī)器生態(tài)系統(tǒng)中有很多機(jī)遇。與使用二維圖像相比,點(diǎn)云能夠更容易的被計(jì)算機(jī)使用,用于構(gòu)建物理環(huán)境的三維形象——二維圖像是人腦最容易理解的數(shù)據(jù),而對(duì)于計(jì)算機(jī)來說,點(diǎn)云是最容易理解
2017-09-26 14:30:16
4個(gè)開關(guān)量輸入信號(hào)組合選取15組區(qū)域組(FieldSet)中的任一個(gè)作為當(dāng)前工作區(qū)域組,適應(yīng)復(fù)雜多變的應(yīng)用環(huán)境,還可以輸出點(diǎn)云數(shù)據(jù)。 ■鐳神激光雷達(dá)+SLAM算法可實(shí)現(xiàn)的五大功能 激光雷達(dá)為主
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達(dá)嗎?
2020-12-31 17:48:20
FMCW激光雷達(dá)與dTOF激光雷達(dá)的區(qū)別在哪?
2021-07-23 13:22:37
實(shí)時(shí)顯示,通常把每個(gè)脈沖的數(shù)據(jù)都保存和顯示,因而不要求很大的板上存儲(chǔ)空間。另一個(gè)重要的指標(biāo)是AD轉(zhuǎn)換分辨率,8bit分辨率對(duì)應(yīng)于滿量程0.3%的精度,12bit分辨率對(duì)應(yīng)0.025%的精度。由于激光雷達(dá)
2016-05-23 14:44:42
大神出來聊聊: RPLIDAR A2 360°激光雷達(dá),能不能輸出數(shù)據(jù)到arduino上?或者說arduino能跟得上嗎?
2020-08-14 08:02:55
TOF 方案激光雷達(dá)是激光雷達(dá)新一代技術(shù)方案,本產(chǎn)品解決了如市場(chǎng)三角測(cè)試法等產(chǎn)品組裝問題難,價(jià)格成本高等問題,目前提供面陣及單光子技術(shù),基于COM產(chǎn)品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學(xué)習(xí)筆記——TOF 高速單線激光雷達(dá) L10_串口中斷通信1. TOF 高速單線激光雷達(dá) L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達(dá)
2022-03-02 07:19:03
原理的激光雷達(dá)來說影響更加嚴(yán)重。因?yàn)樾枰軌騾^(qū)分出環(huán)境光和激光信號(hào),就需要有更優(yōu)異的處理算法和光學(xué)調(diào)校。 傳統(tǒng)受限于原理,三角測(cè)距法的激光雷達(dá)都會(huì)給大家一種完全無法抗擊環(huán)境光照的印象,更不提在室外可以工作
2018-02-02 14:06:27
的多元組合態(tài)勢(shì)。車載激光雷達(dá)應(yīng)用算法可分為三類:點(diǎn)云分割算法、目標(biāo)跟蹤與識(shí)別算法、即時(shí)定位與地圖構(gòu)建算法(simultaneous localization and mapping,SLAM)。
各類
2023-09-19 13:35:01
激光雷達(dá)和與之競(jìng)爭(zhēng)的傳感器技術(shù)(相機(jī)、雷達(dá)和超聲波)加強(qiáng)了對(duì)傳感器融合的需要,也對(duì)認(rèn)真謹(jǐn)慎地選擇光電探測(cè)器、光源和MEMS振鏡提出了更高的要求。 傳感器技術(shù)、成像、雷達(dá)、光探測(cè)技術(shù)及測(cè)距技術(shù)
2018-09-10 14:10:45
反射光,采用相應(yīng)的算法對(duì)多次發(fā)射光進(jìn)行處理,就是多次回波技術(shù)。 多次回波技術(shù),在很多激光雷達(dá)中都有應(yīng)用。最常見的處理方法就是采用最后一次回波,如果在雨霧、灰塵環(huán)境中,激光可以穿透雨霧、灰塵,并最終打到
2020-09-24 14:17:56
批量出貨和廣泛應(yīng)用于各類盲區(qū)檢測(cè)和障礙物探測(cè)的場(chǎng)景,它內(nèi)置的避障算法的省心設(shè)計(jì)讓它在現(xiàn)場(chǎng)吸引了更多客戶。同樣是固態(tài)激光雷達(dá),CE30-A主要面向的是僅用于判斷目標(biāo)區(qū)域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:38:47
出貨和廣泛應(yīng)用于各類盲區(qū)檢測(cè)和障礙物探測(cè)的場(chǎng)景,它內(nèi)置的避障算法的省心設(shè)計(jì)讓它在現(xiàn)場(chǎng)吸引了更多客戶。同樣是固態(tài)激光雷達(dá),CE30-A主要面向的是僅用于判斷目標(biāo)區(qū)域是否有行人或者物體入侵,或者行駛路徑
2018-01-26 09:19:09
批量出貨和廣泛應(yīng)用于各類盲區(qū)檢測(cè)和障礙物探測(cè)的場(chǎng)景,它內(nèi)置的避障算法的省心設(shè)計(jì)讓它在現(xiàn)場(chǎng)吸引了更多客戶。同樣是固態(tài)激光雷達(dá),CE30-A主要面向的是僅用于判斷目標(biāo)區(qū)域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:36:04
達(dá)22m的量程和更為穩(wěn)定的測(cè)距性能。 北醒結(jié)合創(chuàng)新的生產(chǎn)工藝和軟、硬件多項(xiàng)優(yōu)化,使得激光雷達(dá)真正達(dá)到了消費(fèi)級(jí),可應(yīng)用到更廣泛的領(lǐng)域。 ? 遠(yuǎn)、準(zhǔn)、穩(wěn) ? 最遠(yuǎn)測(cè)距可達(dá)22m, 高頻率的實(shí)時(shí)測(cè)量,具有
2018-01-04 10:21:23
`我們已經(jīng)對(duì)單線激光雷達(dá)司空見慣,其旋轉(zhuǎn)線掃的測(cè)量方式導(dǎo)致造成壽命問題和價(jià)格居高不下。 因此,北醒研發(fā)了CE30,它是一款具有大視場(chǎng)角的固態(tài)激光雷達(dá)。它可同時(shí)輸出132°水平視場(chǎng)、9度垂直視場(chǎng)范圍內(nèi)
2018-01-04 10:18:39
批量出貨和廣泛應(yīng)用于各類盲區(qū)檢測(cè)和障礙物探測(cè)的場(chǎng)景,它內(nèi)置的避障算法的省心設(shè)計(jì)讓它在現(xiàn)場(chǎng)吸引了更多客戶。同樣是固態(tài)激光雷達(dá),CE30-A主要面向的是僅用于判斷目標(biāo)區(qū)域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:41:33
)Kinect攝像頭 7)激光雷達(dá)2、已完成的部分,成果展示 根據(jù)Kinect攝像頭,小車能夠自主避障 利用Kinect攝像頭和slam算法,小車能在室內(nèi)建...
2021-11-08 06:17:14
的激光雷達(dá)物體識(shí)別技術(shù)一直難以在嵌入式平臺(tái)上實(shí)時(shí)運(yùn)行。經(jīng)緯恒潤(rùn)經(jīng)過潛心研發(fā),攻克了深度神經(jīng)網(wǎng)絡(luò)在嵌入式平臺(tái)部署所面臨的算子定制與加速、量化策略、模型壓縮等難題,率先實(shí)現(xiàn)了高性能激光檢測(cè)神經(jīng)網(wǎng)絡(luò)并成功地在嵌入式平臺(tái)(德州儀TI TDA4系列)上完成部署。系統(tǒng)功能目前該系統(tǒng):?支持接入禾賽Pandar 40和
2021-12-21 07:59:18
跪求基于載波激光雷達(dá)的水下目標(biāo)探測(cè)技術(shù)的資料,要搞畢業(yè)論文。
2011-02-24 21:27:42
來檢測(cè)物體。激光雷達(dá)系統(tǒng)的視場(chǎng) (FOV) 決定了激光雷達(dá)能夠捕捉到的圖像的寬度,因此該視場(chǎng)對(duì)于自動(dòng)駕駛決策算法十分重要。擴(kuò)大FOV的方法有很多種,其中之一就是利用機(jī)械掃描,使用電機(jī)幫助實(shí)現(xiàn)360度
2022-11-03 07:12:38
1、概述由于課題要求,需要設(shè)計(jì)一款適合于果園應(yīng)用的激光雷達(dá)。因此采用單線掃描激光雷達(dá)和角度傳感器來設(shè)計(jì)能采集二維數(shù)據(jù)的激光雷達(dá)。關(guān)于數(shù)據(jù)的轉(zhuǎn)化的理論,我們可以查閱相關(guān)文獻(xiàn)。在此,只講基本的構(gòu)造和程序
2021-11-12 08:15:02
本文檔的主要內(nèi)容詳細(xì)介紹的是小米的2D激光雷達(dá)拆解圖和講解。
2023-09-22 08:07:45
單線激光雷達(dá)特點(diǎn):結(jié)構(gòu)簡(jiǎn)單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達(dá)實(shí)際上就是一個(gè)高同頻激光脈沖掃描儀,加上一個(gè)一維旋轉(zhuǎn)掃描。單線激光雷達(dá)雖然原理簡(jiǎn)單但是可以有效、高頻的測(cè)試物體的距離
2017-09-25 11:30:10
的形狀和周圍環(huán)境,結(jié)合SLAM算法和視覺傳感器,進(jìn)行SLAM避障與導(dǎo)航。圖源:Science Robotics障礙物規(guī)避A1激光雷達(dá)通過不斷的旋轉(zhuǎn),發(fā)射激光出去,接受激光返回,算出障礙物距離當(dāng)前的距離
2021-11-12 14:12:43
`TFmini是北醒在推進(jìn)激光雷達(dá)低成本化進(jìn)程中里程碑式的一步。 產(chǎn)品配以獨(dú)特的光學(xué)、結(jié)構(gòu)和電子設(shè)計(jì),使得產(chǎn)品具有低成本、小體積和低功耗三大優(yōu)點(diǎn)。 產(chǎn)品內(nèi)置室內(nèi)外各應(yīng)用環(huán)境的適配算法,可保證產(chǎn)品在
2018-01-04 10:22:39
到商業(yè)化,到如今廣泛被市場(chǎng)認(rèn)可,花了不到10年時(shí)間,而真正國內(nèi)新能源汽車銷量的爆發(fā)又集中在最近3年。成熟的無人駕駛方案離不開激光雷達(dá)激光雷達(dá)(LiDAR)是無人駕駛汽車中最強(qiáng)大的傳感器之一。它可以區(qū)分真實(shí)
2017-10-23 17:51:41
經(jīng)過拆解可以看出PIN型固態(tài)激光雷達(dá)除鏡頭外都有標(biāo)準(zhǔn)的量產(chǎn)元件可以選擇,門檻很低,成本也不高,未來可以取代傳統(tǒng)的低像素?cái)z像頭。但與攝像頭比,激光雷達(dá)可以全天候全天時(shí)工作,雨雪霧霾,白天黑夜都能勝任。
2020-05-20 06:56:28
,多路獨(dú)立輸出用于不同監(jiān)控目的。當(dāng)檢測(cè)到入侵者時(shí),可提供準(zhǔn)確的位置信息,結(jié)合視頻系統(tǒng)實(shí)時(shí)追蹤聚焦。激光雷達(dá)+安防監(jiān)控應(yīng)用據(jù)麥姆斯咨詢報(bào)道,激光雷達(dá)(LiDAR)傳感器與智能傳感解決方案全球領(lǐng)導(dǎo)者
2020-02-29 17:03:44
,激光雷達(dá)就要發(fā)揮更大的價(jià)值了,就是要幫助機(jī)器人解決第二個(gè)問題:行走問題。 機(jī)器人擁有智能行走能力不是單靠雷達(dá)就能實(shí)現(xiàn)的,這個(gè)時(shí)候,小嵐就要引入激光SLAM這個(gè)概念了,相信大家也不陌生。 在這里就不
2019-02-15 15:12:28
近年來,隨著雷達(dá)技術(shù)的發(fā)展和普及,科技大片中的無人駕駛離我們?cè)絹碓浇H蚝芏嘀懈邫n汽車已經(jīng)開始配備汽車雷達(dá)。目前用于汽車上的雷達(dá)分為超聲波雷達(dá)、毫米波雷達(dá)、激光雷達(dá)等,不同的雷達(dá)工作原理不同,性能
2019-09-19 09:05:02
導(dǎo),典型代表如谷歌Waymo。1、視覺主導(dǎo),以特斯拉為代表:攝像頭+毫米波雷達(dá)+超聲波雷達(dá)+低成本激光雷達(dá)。攝像頭視覺屬于被動(dòng)視覺,受環(huán)境光照的影響較大,目標(biāo)檢測(cè)與SLAM較不可靠,但成本低。目前,特斯拉
2017-09-06 11:36:58
的位置信息,無漏判、誤判;精準(zhǔn)匹配不同車寬,能夠多機(jī)協(xié)同工作,且抗強(qiáng)光。北醒(北京)光子科技有限公司(北醒(北京)光子科技有限公司丨Tof激光雷達(dá)&SLAM解決方案)是一家中外合資的國家
2017-12-07 14:47:45
SLAMWARE構(gòu)建的地圖是一個(gè)完美的閉環(huán),它與我們辦公室的設(shè)計(jì)圖完美重合。除了算法層面的回環(huán)問題,SLAM實(shí)際應(yīng)用中還有很多這種坑,比如走廊問題與外界干擾問題。以外界干擾問題來說,通常,激光雷達(dá)作為
2017-06-30 15:05:26
iphone12這個(gè)亮點(diǎn)不在5G上面,畢竟國內(nèi)的一些廠商早就已配備,也不在顏色,重點(diǎn)在于配備了一顆激光雷達(dá)!先說一下這個(gè)激光雷達(dá)帶來的用途,最直接的就是能夠快速精準(zhǔn)對(duì)焦,即使在晚上也能夠很好實(shí)現(xiàn)
2021-07-22 09:12:51
空間激光雷達(dá)最小接收光功率的計(jì)算【摘要】采用信號(hào)檢測(cè)的統(tǒng)計(jì)思想,在詳細(xì)分析雷達(dá)接收機(jī)各種噪聲大小與概率分布、計(jì)算空間背景光大小和光譜特性的前提下,基于信號(hào)檢測(cè)理論中的虛警概率和發(fā)現(xiàn)概率提出了一種能
2009-05-15 01:20:13
自制低成本3d激光掃描測(cè)距儀激光雷達(dá)
2020-05-27 16:23:12
,通過多個(gè)激光發(fā)射器達(dá)到實(shí)時(shí)環(huán)境感知的目的。這種激光雷達(dá)屬于脈沖測(cè)距方式。相比三角測(cè)距方案,它的成本會(huì)要高得多,開發(fā)難度也大。相對(duì)比掃地機(jī)器人中的激光雷達(dá),掃地機(jī)器人采用的激光雷達(dá)測(cè)量距離近(15米內(nèi)
2018-09-10 14:21:58
,利用先進(jìn)的算法處理彌補(bǔ)部件性能,從而大大降低了使用門檻和產(chǎn)品成本(僅為工業(yè)級(jí)產(chǎn)品的十分之一),在家用批量場(chǎng)景下,激光雷達(dá)的成本僅幾百元。 `
2018-09-10 16:32:46
請(qǐng)問激光雷達(dá)和激光掃描儀的具體區(qū)別在哪兒?
2022-05-13 11:05:19
激光雷達(dá)是如何產(chǎn)生的?激光雷達(dá)在自動(dòng)駕駛領(lǐng)域有什么作用?
2021-06-17 07:31:54
的環(huán)境感知系統(tǒng)一般由多個(gè)傳感器組成,包括激光雷達(dá)、毫米波雷達(dá)、攝像頭、GPS 等。其中,攝像頭、毫米波雷達(dá)、激光雷達(dá)是無人駕駛汽車中最常用的三種環(huán)境感知解決方案。 攝像頭的優(yōu)點(diǎn)是成本低廉,圖像算法
2017-08-21 14:54:32
建圖,路徑規(guī)劃、自主避障等任務(wù),它是目前性能最穩(wěn)定、可靠性最強(qiáng)的定位導(dǎo)航方法,且使用壽命長(zhǎng),后期改造成本低。 掃地機(jī)器人是目前單線激光雷達(dá)應(yīng)用最廣泛的領(lǐng)域,激光雷達(dá)配合slam算法,可以讓掃地機(jī)
2018-12-10 14:55:39
請(qǐng)問各位大咖,激光雷達(dá)的測(cè)量距離能到多少?
2022-10-05 03:18:49
在目前很多自動(dòng)駕駛測(cè)試車中,激光雷達(dá)其重要的組成,很多人認(rèn)為未來自動(dòng)駕駛汽車在障礙探測(cè)和 SLAM(實(shí)時(shí)定位和地圖構(gòu)建)上,必須依靠激光雷達(dá),ABI Research認(rèn)為,到 2027 年激光雷達(dá)市場(chǎng)規(guī)模會(huì)增到到130億美元,但是,但是,這個(gè)市場(chǎng)需要的也許不是目前的這種激光雷達(dá)!
2018-07-26 14:59:545696 
應(yīng)用于無人駕駛領(lǐng)域。在無人駕駛領(lǐng)域,多線激光雷達(dá)主要有以下兩個(gè)核心作用:3D建模及環(huán)境感知:通過多線激光雷達(dá)可以掃描到汽車周圍環(huán)境的3D模型,運(yùn)用相關(guān)算法對(duì)比上一幀及下一幀環(huán)境的變化,能較為容易的檢測(cè)
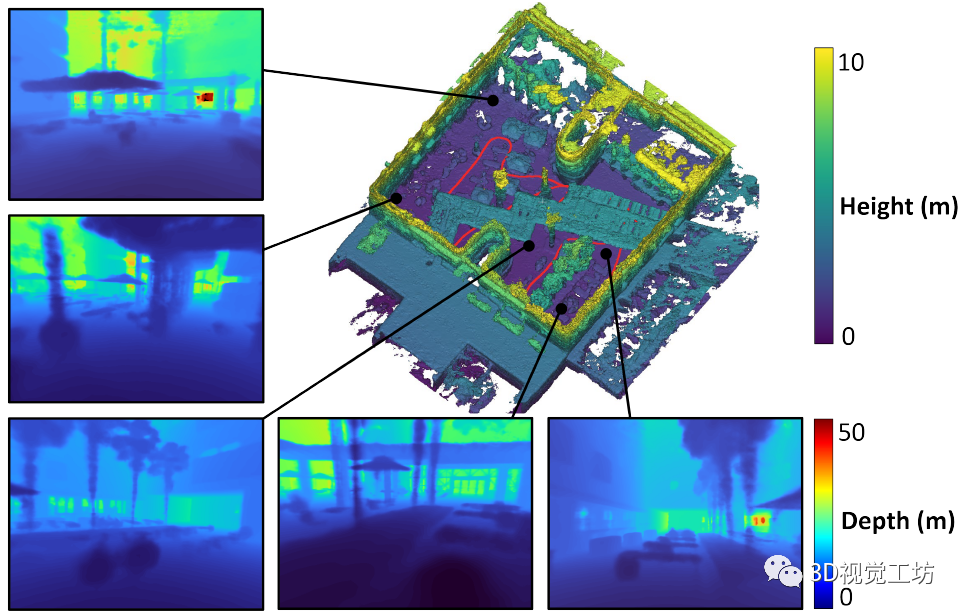
2019-08-13 14:09:4117510 來實(shí)現(xiàn)這一目標(biāo)。該系統(tǒng)實(shí)時(shí)生成環(huán)閉合校正的6自由度激光雷達(dá)姿態(tài)和接近實(shí)時(shí)的1cm體素稠密點(diǎn)云。與最先進(jìn)的激光雷達(dá)方法相比,VIL-SLAM顯示了更高的精確度和魯棒性。
2021-02-18 17:59:061949 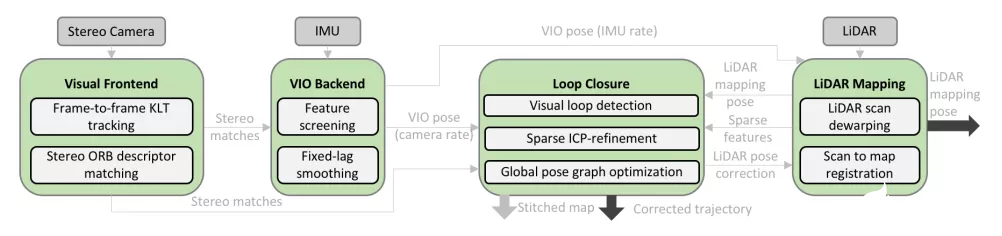
一般將使用單線雷達(dá)建構(gòu)二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數(shù)據(jù)和運(yùn)動(dòng)都限制在2D平面內(nèi)且運(yùn)動(dòng)平面與激光掃描平面平行。
2021-04-18 10:18:1212156 
算法框架和關(guān)鍵模塊, 分析闡述了近年來的研究熱點(diǎn)問題和未來發(fā)展趨勢(shì), 梳理了3D激光雷達(dá) SLAM 算法性能的評(píng)估標(biāo)準(zhǔn), 并據(jù)此選取目前較為成熟的具有代表性的6種開源 3D 激光雷達(dá)SLAM 算法
2022-03-21 16:07:574576 等優(yōu)勢(shì)。隨著科技的不斷發(fā)展,激光雷達(dá)的應(yīng)用越來越廣泛,在機(jī)器人、無人駕駛、無人車等領(lǐng)域都能看到它的身影。 激光雷達(dá)現(xiàn)狀-低成本和高穩(wěn)定不可兼得? 相較于十分依賴算法、需要海量數(shù)據(jù)進(jìn)行訓(xùn)練、受環(huán)境因素影響頗大的攝像頭視覺和識(shí)別精
2022-06-20 16:53:4122719 相機(jī)和激光雷達(dá)之間的時(shí)間戳同步問題一直是實(shí)時(shí)跑SLAM的先決條件。本文試圖以最清晰的思路去講明白這個(gè)事情。
2022-10-19 15:22:551601 相機(jī)和激光雷達(dá)之間的時(shí)間戳同步問題一直是實(shí)時(shí)跑SLAM的先決條件。本文試圖以最清晰的思路去講明白這個(gè)事情。
2022-11-28 16:08:041158 通常激光雷達(dá)可以分為兩大類:機(jī)械式激光雷達(dá)和固態(tài)激光雷達(dá)。機(jī)械式激光雷達(dá)采用機(jī)械旋轉(zhuǎn)部件作為光束掃描的實(shí)現(xiàn)方式,可以實(shí)現(xiàn)大角度掃描,但是裝配困難、掃描頻率低。
2023-02-21 11:18:553970 一般將使用單線雷達(dá)建構(gòu)二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數(shù)據(jù)和運(yùn)動(dòng)都限制在2D平面內(nèi)且運(yùn)動(dòng)平面與激光掃描平面平行。
2023-03-27 11:06:561385 激光雷達(dá)分單線和多線這兩大類,針對(duì)這兩類Lidar所使用的算法也不盡相同。 首先單線雷達(dá)一般應(yīng)用在平面運(yùn)動(dòng)場(chǎng)景,多線雷達(dá)則可以應(yīng)用于三維運(yùn)動(dòng)場(chǎng)景。
2023-03-27 11:02:181901 中國最大測(cè)繪地信展會(huì),其域創(chuàng)新重新定義手持激光雷達(dá)、手持SLAM設(shè)備。
2023-04-27 12:26:50930 
激光雷達(dá)即激光探測(cè)及測(cè)距系統(tǒng),是通過發(fā)射激光束來探測(cè)目標(biāo)位置、速度等特征量的雷達(dá)系統(tǒng)。按掃描維度,激光雷達(dá)可分為一維激光雷達(dá)、二維激光雷達(dá)和三維激光雷達(dá)。
2023-05-10 09:58:335397 
。是一家能提供單點(diǎn)、單線到多線全系列、dtof、itof全品類激光雷達(dá)方案定制化的公司,而且掌握了機(jī)器人移動(dòng)底盤技術(shù)。在激光雷達(dá)核心硬件、專用芯片、AI算法上具有完整的自主知識(shí)產(chǎn)權(quán)。
2022-02-08 14:56:412438 
。是一家能提供單點(diǎn)、單線到多線全系列、dtof、itof全品類激光雷達(dá)方案定制化的公司,而且掌握了機(jī)器人移動(dòng)底盤技術(shù)。在激光雷達(dá)核心硬件、專用芯片、AI算法上具有完整的自主知識(shí)產(chǎn)權(quán)
2022-03-16 18:17:448551 
激光雷達(dá)由發(fā)射,接收和后置信號(hào)處理三部分和使此三部分協(xié)調(diào)工作的機(jī)構(gòu)組成
傳統(tǒng)的雷達(dá)是微波和毫米波波段的電磁波為載波的雷達(dá)
是一家能提供單點(diǎn)、單線到多線全系列、dtof、itof全品類激光雷達(dá)方案定制化的公司,而且掌握了機(jī)器人移動(dòng)底盤技術(shù)。在激光雷達(dá)核心硬件、專用芯片、AI算法上具有完整的自主知識(shí)產(chǎn)權(quán)
2022-01-24 10:08:432008 
。是一家能提供單點(diǎn)、單線到多線全系列、dtof、itof全品類激光雷達(dá)方案定制化的公司,而且掌握了機(jī)器人移動(dòng)底盤技術(shù)。在激光雷達(dá)核心硬件、專用芯片、AI算法上具有完整的自主知識(shí)產(chǎn)權(quán)。
2022-02-10 18:36:418847 
自動(dòng)駕駛的角度來看,說到近兩年哪一個(gè)主題最熱門,肯定離不開激光雷達(dá)。2021年被譽(yù)為激光雷達(dá)量產(chǎn)之年,不少車企都公布了裝備“車規(guī)級(jí)”激光雷達(dá)車型量產(chǎn)日期。然而何為“車規(guī)級(jí)”激光雷達(dá)?激光雷達(dá)產(chǎn)業(yè)人士
2023-02-08 14:52:251758 
激光雷達(dá)在自動(dòng)駕駛應(yīng)用中主要用來探測(cè)道路上的障礙物信息,把數(shù)據(jù)和信號(hào)傳遞給自動(dòng)駕駛的大腦,再做出相應(yīng)的駕駛動(dòng)作,但室外常見的干擾因素如雨、霧、雪、粉塵、高低溫等對(duì)激光雷達(dá)的識(shí)別造成了極大的影響。因此
2023-07-14 11:11:303321 什么是激光雷達(dá)3DSLAM?在了解這個(gè)概念之前,我們首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即時(shí)定位與建圖。通俗
2023-11-25 08:23:57998 
單線激光雷達(dá)和多線激光雷達(dá)區(qū)別? 單線激光雷達(dá)和多線激光雷達(dá)是兩種常用的激光雷達(dá)技術(shù)。它們?cè)?b class="flag-6" style="color: red">激光的發(fā)射方式、數(shù)據(jù)采集、成像分辨率和應(yīng)用場(chǎng)景等方面存在著很大的區(qū)別。 首先,單線激光雷達(dá)是指激光雷達(dá)
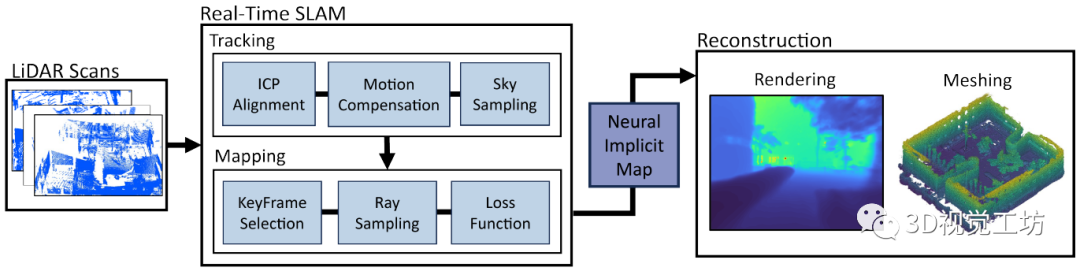
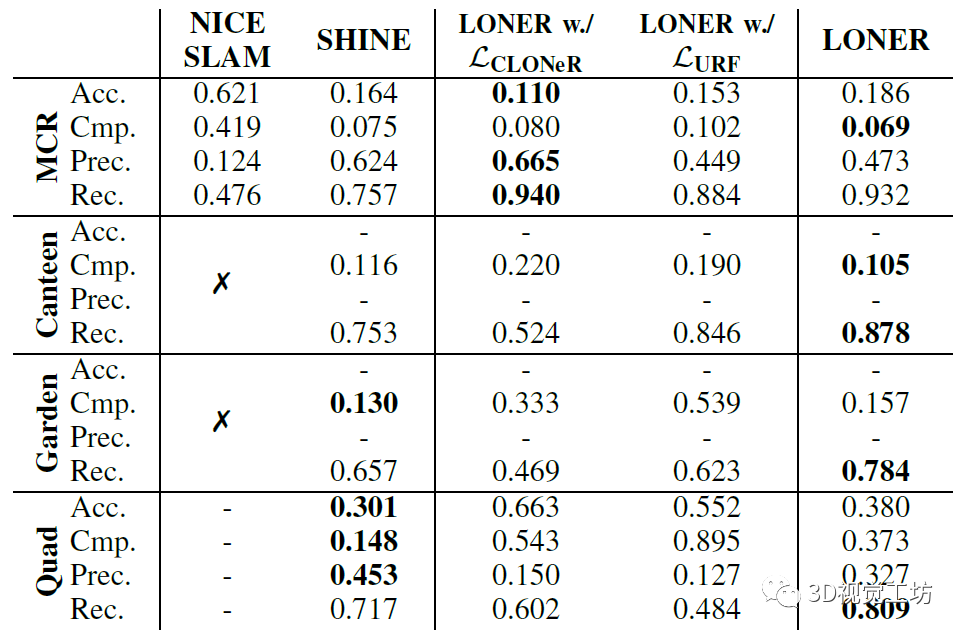
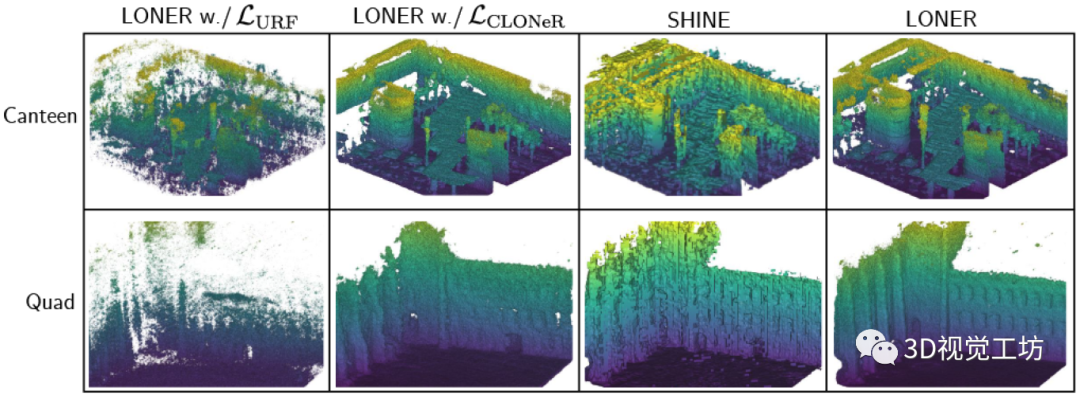
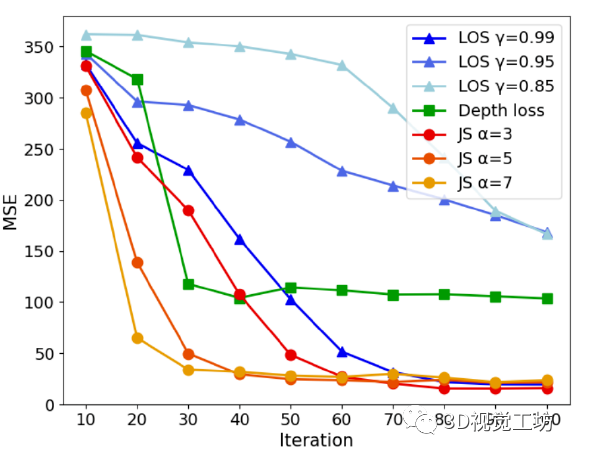
2023-12-07 15:48:331851 基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數(shù),通過可微分渲染捕獲稠密的光度信息,具有高保真度。
2024-01-26 10:48:31259 
激光雷達(dá)導(dǎo)航是通過360度旋轉(zhuǎn)雷達(dá)對(duì)周圍10米以內(nèi)平面空間進(jìn)行掃描,并生成平面地圖;根據(jù)雷達(dá)掃描出來的平面地圖結(jié)合碰撞、沿墻等不同的傳感器取得的數(shù)據(jù)來進(jìn)行
2021-11-17 10:10:25
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論