本期介紹的是六軸傳感器6050,之前在網上CSDN上看了許多關于MPU6050的介紹,感覺許多都是空話,真正實用的東西并不多,下面該模塊的程序我是先看的正點原子stm32單片機的例程之后一點一點移植到FPGA中的。這里只移植了初始化和讀取陀螺儀原始數據部分的程序,關于DMP嘛,因為個人能力不夠移植不了。
2023-07-23 11:52:40 1914
1914 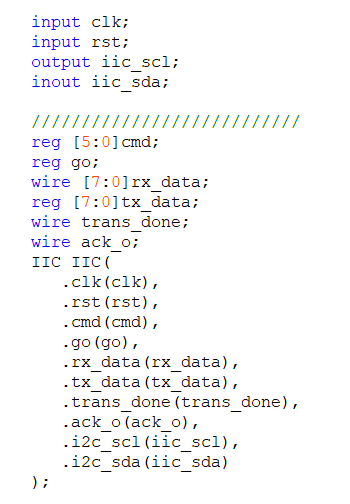
MPU6050 DPM移植到Air724/Air800 Lua語言MPU6050MPU6050是一個三軸加速度+三軸陀螺儀的六軸傳感器,自帶DMP數字運動處理器,可以減少MCU復雜的融合演算數據、感
2021-08-20 07:10:36
一.簡介MPU6050 是 InvenSense 公司推出的整合性 6 軸運動處理組件,其內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個IIC 接口, 可用于連接外部磁力傳感器,并利用
2022-02-10 06:59:34
一、MPU6050簡介MPU6050是InvenSense公司推出的全球首款整合性6軸運動處理組件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個第二IIC接口,可用于連接外部磁力傳感器,利用自帶
2022-02-10 06:15:57
MPU6050六軸傳感器1 自帶數字運動處理2 集成可程序控制(陀螺儀)3 集成可程序控制(加速度傳感器)4 自帶數字溫度傳感器5 可輸出中斷 支持姿勢識別各種動作感應功能6 自帶1024字節
2022-02-10 06:49:59
,總會有忘記的,所以來寫這本書的隨手筆記,記錄重點、易忘點。該博客可以當做字典,也可以當做筆記。目前內容:MPU6050六軸傳感器 一、什么是MPU6050?: MP...
2022-02-10 07:15:46
我用MPU6050接到小熊派開發版上讀取到加速度原始數據,按照網上說的公式轉換成加速度,加速度基本上都是在0附近,要大力快速晃動MPU6050傳感器,加速度值才會變化。這是什么原因?
2023-05-17 19:28:34
mpu6050是一個六軸傳感器包括三軸陀螺儀和三軸加速度,分別可以測得三軸的角速度、加速度。但是一般傳感器的原始數據都不能直接直接拿來用,都需要濾波和姿態融合解算。對于初學者來說卡爾曼濾波和姿態融合
2022-02-10 06:25:15
MPU6050姿態解算的原理是什么?MPU6050姿態解算的程序該如何去是實現呢?
2021-12-17 07:14:26
1、MPU6050使用詳解及DMP姿態解算MPU-60X0 是世界上第一款集成 6 軸 MotionTracking 設備。它集成了 3 軸 MEMS 陀螺儀,3 軸 MEMS加速度計,以及一個可
2022-04-14 16:04:14
大家好,我最近在做畢業設計,題目叫做《基于Mems傳感器的運動目標姿態識別系統(硬件部分)》,任務書要求求出姿態角,轉矩,還有位移,然后我就用的是MPU6050來測角加速度,然后就是測不出線加速度
2016-04-25 21:10:07
Z軸原始數據---------%d \r\n",GetData(GYRO_ZOUT_H));………………………………限于本文篇幅 余下代碼請從電子發燒友下載附件………… 所有資料51hei提供下載: MPU6050(硬件IIC).zip
2018-07-02 00:13:53
原子哥,用你給的ALIENTEK MiniSTM32 ATK-MPU6050六軸傳感器模塊例程和上位機做測試,上位機有收到數據,但是數據很亂,我使勁晃動MPU6050傳感器,波形,姿態都沒有任何反應,還有這協議怎么用呀?
2019-09-22 21:42:31
MPU6050 加速度傳感器模塊
2023-03-28 13:06:19
下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態解算)零偏
2021-08-09 07:17:09
K013 基于51/STM32MPU6050測試 OLED0.96顯示原始數據一.實現功能二.硬件清單三.資料清單四.MPU6050模塊簡介與通信協議1.基本參數2.引腳說明3.時序圖五.接線六
2022-02-10 06:58:54
MPU6050的原始數據怎么處理能得到向x,y,z方向移動的距離?
2023-11-08 07:41:32
文章目錄前言一、MPU6050是什么?二、使用步驟1.引入庫2.讀入數據總結前言一、MPU6050是什么?MPU6050是一款性價比很高的陀螺儀,可以讀取X Y Z 三軸角度,X Y Z 三軸加速度
2022-02-10 07:22:09
寫在最前面,這篇博客寫到的姿態解算是由DMP硬件完成的,介紹了底層驅動,重點例舉了MPU6050的初始化函數,加速度計,陀螺儀原始數據的讀取函數,設置傳感器的量程范圍,采樣頻率函數。下一篇博客,我會
2022-02-10 07:46:19
MPU6050MPU6050 內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個第二 IIC 接口,可用于連接外部磁力傳感器,并利用自帶的數字運動處理器(DMP: Digital
2022-02-10 06:17:49
1.簡介MPU6050是InvenSense 公司的 一款高性能三軸加速度+三軸陀螺儀的六軸傳感器芯片, 該芯片內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并可利用自帶的數字運動處理器(DMP
2021-08-04 07:27:16
一、MPU6050簡介1.什么是MPU6050?MPU6050是InvenSense公司推出的全球首款整合性6軸運動處理組件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個第二IIC接口,可用
2021-08-09 07:25:57
時,MPU-60X0提供完整的9軸運動融合輸出到其主I2C或SPI端口(SPI僅在MPU-6000上可用)。MPU6050, 該芯片內部集成一個三軸加速度傳感器和一個三軸陀螺儀,并且自帶 DMP(Digital M...
2022-02-11 07:46:16
mpu6050+stm32的原始數據采集程序,通過串口發送到PC: printf("\r\n---------加速度X軸原始數據---------%d \r\n",GetData
2016-05-23 15:43:47
用51讀取mpu6050原始數據,為什么數據都是-004,而且還不變。代碼就是網上找的常見的。
2017-03-06 14:24:01
原來做了一個小四軸,后來改板子, 電路也還是和英文原版的電路圖一致,4個電容.焊接幾個后,發現了一個很奇葩的問題,燒寫程序驗證原始數據時候,發現重力Z軸的原始數據,正確來說是8192,但是水平
2019-06-02 23:45:07
過程 -------------------------------------------------------------可能有些說明不對的地方,請大家一定要提出來提出來,共同學習 .共同進步.–>>>本文章HAL庫編寫MPU6050輸出六軸原始數據,移植DMP輸出自身姿態角程序鏈接程序鏈接程序鏈接目錄一、mpu6050的通信方式二、CubeMX
2022-02-10 07:01:20
如題,我在用互補濾波和四元數算法解算mpu6050的角度姿態。但是現在的問題是,一旦我的mpu6050轉動速度一快,輸出的數據就會出現問題。如下圖.前面3欄,分別是xyz的角度。轉動的速度一大,就輸出nan。這是為什么?謝謝大神解答!
2015-05-09 18:33:41
MPU6050六軸傳感器,可以同時檢測三軸加速度、三軸陀螺儀(三軸角速度)及溫度,可以用到平衡車、四軸飛行器、手機、運動手環等等設備之中,其中的三維坐標方向為三軸加速度方向,在三維坐標的各個方向形成
2022-02-10 07:50:58
起因最近在學習stm32開發板,最近學習到了需要IIC通信的MPU6050六軸傳感器,看了正點原子的例程,發現其中有很多位操作不是很理解。經過補習了一番C語言,總結了一些位操作的知識。接下來直接貼
2022-02-10 06:06:28
的四軸上位機V2.6版,實現從STM32發送陀螺儀原始數據,姿態角,PID參數到上位機。2、硬件連接(1)STM32與MPU6050(2)STM32的串口1與上位機3、通訊協議通訊代碼都是基于通訊協議編寫的,就好像對暗號一樣,暗號正確才會進行數據傳輸。匿名上位機的通訊協議大體上都遵循0x88+FU
2022-02-10 07:22:58
MPU6050各個方面的介紹,這篇博文[MPU6050開發 – 基本概念簡介](https://blog.csdn.net/qq_29350001/article/details/78603714)GY-521MPU6050 是三維角度傳感器,為全球首例集成六軸傳感器的運動處理組件。這里的六軸,代表的是它
2022-02-10 07:45:15
下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態解算)零偏自動...
2022-02-10 06:01:07
STM32 控制MPU6050之使用說明 mpu6050是陀螺儀、加速計和一個可擴展的傳根器RM-MPU-3000A.pdf ATK-MPU6050六軸傳感器模塊使用說明(Mini V3)_AN1507.pdf
2018-07-06 02:25:47
STM32 控制MPU6050之使用說明 mpu6050是陀螺儀、加速計和一個可擴展的傳根器RM-MPU-3000A.pdf ATK-MPU6050六軸傳感器模塊使用說明(Mini V3)_AN1507.pdf
2018-07-02 08:05:23
歐拉角來定義,歐拉角包含pitch(俯仰角)、yaw(偏航角)、roll(橫滾角),如下圖示意:二、代碼實現功能描述Core采集MPU6050六軸傳感器經過姿態解算后的歐拉角數據,并在電腦串口終端打印出pitch(俯仰角)、yaw(偏航角)、roll(橫滾角)這三個角度的整數部分以方便用戶實時觀察傳感器模
2022-02-10 07:42:40
STM32F4 開發板自帶了 MPU6050 傳感器。本章我們將使用 STM32F4 來驅動 MPU6050,讀取其原始數據,并利用其自帶的 DMP 實現姿態解算,結合匿名四軸上位機軟件和 LCD 顯示
2020-06-12 15:16:29
、實驗總結通過此實驗已經完美的獲取了MPU6050六軸陀螺傳感器的數據讀取,姿態解算的方法,同時結合COF屏完美的展示了MPU6050姿態的可視化。在實驗測試中,COF屏在完成負載的儀表界面顯示時,依然
2022-04-11 01:08:47
一、MPU6050介紹 首先我們了解下MPU6050模塊 MPU6050 為全球首例集成六軸傳感器的運動處理組件,內置了運動融合引擎,用于手持和桌面的應用程序、游戲控制器、體感遙控以及
2023-03-28 14:46:13
使用MPU6050硬件DMP解算姿態是非常簡單的,下面介紹由三軸陀螺儀和加速度計的值來使用四元數軟件解算姿態的方法。我們先來看看如何用歐拉角描述一次平面旋轉(坐標變換):MPU6050的四元數解算
2022-02-10 06:20:09
最近做東西用到了MPU6050這個3軸重力加速度+3軸角速度傳感器,雖然使用庫函數正確的讀取到并算出了要用的值,但在加速度傳感器和角速度傳感器的功能上與伙伴產生了分歧。關于重力加速度和角速度傳感器
2015-08-20 08:54:02
摘要:使用小熊派開發板,通過硬件IIC與MPU6050六軸傳感器模塊通信,完成相應寄存器配置,成功獲取陀螺儀、加速度計數據。本問主要講述使用小熊派開發板+MPU6050六軸傳感器,獲取加速度計以及
2022-02-10 07:00:37
開發板與MPU6050通信的接口是SDA、SCL)連接一個第三方的數據傳感器,比如說磁力計,擴展成9軸數據輸出。MPU6050內置1024字節的fifo緩沖區,可編程的加速度范圍和陀螺儀范圍,可編程的中斷
2022-06-06 17:54:58
之前介紹過,項目的第一項操作是要采集帕金森病人的震顫數據,整體架構圖如下:這里采用的是一款基于MPU6050的JY61型號傳感器,好處在于內置卡爾曼濾波,直接可以通過串口輸出六軸數據,大大方便了編程
2021-12-17 07:00:42
基于戰艦V3的MPU6050六軸陀螺儀實驗陀螺儀的分類3軸傳感器指的是3軸的加速度,根據這個加速度我們解算出XY兩軸的角度。6軸傳感器指的是3軸的加速度和3軸角速度,根據這兩個數據我們解算出XYZ三
2022-02-10 06:53:43
;//歐拉角short aacx,aacy,aacz; //加速度傳感器原始數據short gyrox,gyroy,gyroz;//陀螺儀原始數據NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); delay_init();
2022-02-10 07:30:49
壞了?(通過讀取mpu6050原始數據可以驗證,若能正常讀取原始數據硬件電路應該是沒有問題的)2、IIC通信是否有問題。有人提出了這個解決思路,我根據他的思路發現是移植程序時候,IIC頭文件沒有改過來;...
2022-02-10 06:56:22
MPU6050是什么?如何去讀取MPU6050的加速度計和陀螺儀的原始數據呢?
2021-12-15 06:03:33
空間大。今天用模擬IIC也編寫了,容量可以節省可達一半!不知道大家有遇到這樣的情況了沒?遇到的問題:1、可以讀ID正確,但是讀數據時全為0.當時也很納悶,從懷疑——分析——驗證,在單步仿真時,發現在MPU6050初始化時就出錯,在于MPU_PWR_MGMT1_REG寄存器寫0喚醒時,沒...
2022-02-10 06:15:55
STM32+MPU6050讀取加速度計和陀螺儀原始數據。
2022-02-10 07:04:08
的姿態。MPU6050自帶DMP解算庫,可以直接將我們的原始數據轉換成歐拉角,但是他是非開源的,并且還是針
2022-02-10 07:04:56
玩四軸的都知道, MWC V2.5 飛控主板,板載陀螺儀傳感器就是MPU6050.(不信你可以拿放大鏡看). 而默認的MWC開源程序是自己讀取MPU6050的原始數據,經過,自己的一套算法.算出來四
2022-02-10 07:38:06
怎樣去獲取STM32 MPU6050模塊的數據呢?怎樣去完成MPU6050的零偏自動設置及零漂抑制呢?
2021-11-15 08:04:37
我最近要用mpu6050,就在論壇找了個例程,讀取原始數據的。但lcd顯示一直不變,甚至連不連I2C都沒區別。程序我只能大概看懂,實在不知道怎么解決,求教啊
2018-04-26 11:59:46
最近本人在研究使用三軸加速度傳感器 計算傾角角度研究了幾款芯片,MPU6050,MMA8451,以及SCA3000,通過對芯片加速度原始值的讀取,然后顯示在液晶屏上發現,無論那款芯片,讀取的原始值
2015-08-07 14:17:14
請教一個問題啊,從mpu6050獲取原始數據,怎么轉化成真是有效的數據啊,剛入門,大神指導一下吧
2017-06-24 12:58:54
問下各位大哥,51單片機能操作MPU6050的DMP嗎?在網上找了一下,發現大部分都是STM32操作的,另外,關于MPU6050的DMP實在不怎么懂,大神能知道下操作MPU6050的思路嗎?目前只能讀出原始數據,像三軸重力加速度和角速度的原始數據。
2019-06-18 04:35:46
在做飛行器的時候是怎么解決mpu6050自檢不準確的,如果mpu6050傾斜這放著自檢,初始化完成后計算出的幾個姿態也會不準確,網上找了一些資料說是要加磁阻才行……但是我看好多市面上賣的四軸都是用
2019-06-14 04:35:59
現在我讀取到了 mpu6050 的原始數據,原始數據要怎么處理,能夠判斷mpu6050模塊是運動中,還是靜止中。有相應的算法還是直接對幾次的數據進行比較,看數據變化?
2019-06-14 04:36:02
用原子哥的例程讀出了MPU6050原始的的數據,然后用這個原始數據去轉換角度。用加速度計的數據換算角度:①首先得到ACCX、ACCY、ACCZ(即XYZ三個軸的加速度);②Angle_X=atan
2019-04-03 01:52:23
想要一個stm32f103c8t6控制mpu6050姿態傳感器的底層驅動程序
2019-08-05 04:35:54
最近在研究小四軸的飛行,姿態檢測主要用到的傳感器是MPU6050。從MPU6050讀出來的加速度和角速度數據最后要轉成姿態,可以轉換成歐拉角(偏航角、俯仰角和滾轉角)或四元數表示,為了減少計算量(歐拉角涉及正弦運算,運算量相對較大),方便在STM32主控上實現,可以轉換成四元數表示。
2017-11-07 10:39:3018851 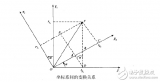
、三軸陀螺儀(三軸角速度)的運動數據以及溫度數據。利用 MPU6050 芯片內部的 DMP 模塊(Digital Motion Processor 數字運動處理器),可對傳感器數據進行濾波、融合處理
2017-11-28 15:15:24 16
16 介紹了mpu6050姿態融合原理及程序代碼分析,MPU6050是一款姿態傳感器。主要介紹三種姿態融合算法:四元數法、一階互補算法和卡爾曼濾波算法。
2017-12-11 13:31:4071162 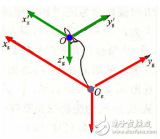
本文主要介紹了mpu6050姿態解算原理分析及程序設計,MPU6050硬件DMP解算姿態是非常簡單的,四元數法只求解四個未知量的線性微分方程組,計算量小,易于操作,是比較實用的工程方法。
2017-12-11 13:51:3441795 
本文為大家分享了mpu6050六軸傳感器模塊驅動程序源代碼,STM32F1讀取MPU6050的加速度和角度傳感器數據的初始化步驟,以及MPU6050DMP初始化函數、DMP姿態解算后的俯仰角、橫滾角和航向角。
2017-12-11 14:26:5235036 
本文介紹了mpu6050和mpu3050有什么不同和相同。分別介紹了mpu6050和mpu3050基礎以及特點,mpu3050是三軸陀螺傳感器,MPU6050內部整合了3軸陀螺儀和3軸加速度傳感器。
2017-12-11 15:41:5534849 mpu6050常用作提供飛控運行時的姿態測量和計算。本文首先介紹了MPU6050姿態解算的原理,其次詳細的介紹了mpu6050姿態解算程序。
2018-03-09 09:15:2441958 本文檔的主要內容詳細介紹的是使用STC89C52單片機控制LCD1602顯示MPU6050的10位原始數據程序免費下載。
2019-08-06 16:39:0627 本文檔的主要內容詳細介紹的是使用軟件模擬IIC基于STC8讀取MPU6050原始數據的C語言程序免費下載。
2019-11-01 17:06:0041 本文檔的主要內容詳細介紹的是MPU6050傳感器的電路原理圖免費下載。
2020-05-29 08:00:0037 STM32+MPU6050讀取加速度計和陀螺儀原始數據。
2021-12-06 11:51:1111 MPU6050簡介什么是MPU6050MPU6050的特點MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅動庫驅動代碼硬件連接
2021-12-06 11:51:1167 下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態
2021-12-06 12:06:0733 一、MPU6050簡介MPU6050是InvenSense公司推出的全球首款整合性6軸運動處理組件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個第二IIC接口,可用于連接外部磁力傳感器,利用自帶
2021-12-06 12:21:0618 ; //歐拉角 short aacx,aacy,aacz; //加速度傳感器原始數據 short gyrox,gyroy,gyroz; //陀螺儀原始數據 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); delay_init();
2021-12-06 12:21:0720 介紹一個學長做的單片機項目教程:MPU6050姿態解算大家可用于 課程設計 或 畢業設計技術解答畢設幫助:<Q>7468760412 MPU6050MPU6050是一種非常流行的空間運動傳感器芯片,可以獲取器件當前的三個加速度分量和三個旋轉角速度。由于其體積小巧,功能強大,
2021-12-06 12:51:1013 寫在最前面,這篇博客寫到的姿態解算是由DMP硬件完成的,介紹了底層驅動,重點例舉了MPU6050的初始化函數,加速度計,陀螺儀原始數據的讀取函數,設置傳感器的量程范圍,采樣頻率函數。下一篇博客,我會
2021-12-06 13:06:1514 STM32獲取MPU6050數據
2021-12-06 13:06:1648 MPU6050姿態融合解算(DMP)
2021-12-06 13:21:1037 摘要:使用小熊派開發板,通過硬件IIC與MPU6050六軸傳感器模塊通信,完成相應寄存器配置,成功獲取陀螺儀、加速度計數據。本問主要講述使用小熊派開發板+MPU6050六軸傳感器,獲取加速度計以及
2021-12-06 14:21:0915 過程 -------------------------------------------------------------可能有些說明不對的地方,請大家一定要提出來提出來,共同學習 .共同進步.–>>>本文章HAL庫編寫MPU6050輸出六軸原始數據,移植DMP輸出自身姿態角程序鏈接程序鏈接程序鏈接目錄一、mpu6050的通信
2021-12-06 14:36:1410 的是它的6個原始數據,這些數據對于我們初學的人來說用處不大,所以我們一般還要將其進行濾波,四元數轉換等等操作得到其三個角(航向角(yaw)、橫滾角(roll)和俯仰角(pitch)),這三者就能夠表示當前設備的姿態。MPU6050自帶DMP解算庫,可以直接將我們的原始數據轉換成
2021-12-06 16:06:0916 K013 基于51/STM32 MPU6050測試 OLED0.96顯示原始數據一. 實現功能二. 硬件清單三. 資料清單四. MPU6050模塊簡介與通信協議1.基本參數2.引腳說明3.時序
2021-12-06 16:06:0929 玩四軸的都知道, MWC V2.5 飛控主板,板載陀螺儀傳感器就是MPU6050.(不信你可以拿放大鏡看). 而默認的MWC開源程序是自己讀取MPU6050的原始數據,經過,自己的一套算法.算出來
2021-12-06 16:51:101 下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態解算)零偏自動...
2021-12-06 17:06:1017 對于大多數MPU6050的應用來說,獲取到的原始數據并沒有多大用處,我們需要對原始數據進行姿態融合解算,最終得到姿態數據,也就是三個歐拉角:航向角(yaw)、橫滾角(roll)和俯仰角(pitch)。
2023-06-15 15:03:391151 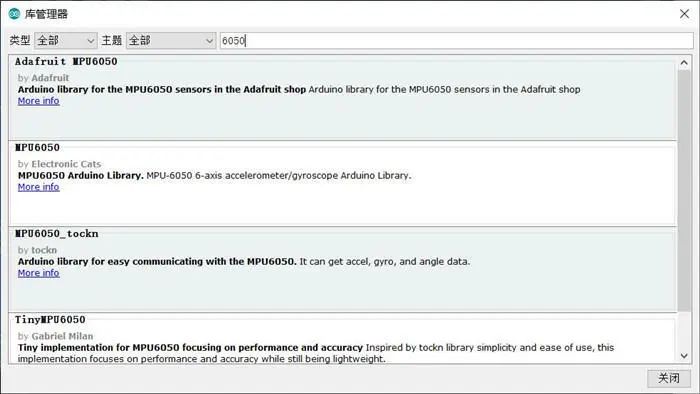
——來自迪文開發者論壇用戶本方案使用COF屏的IO口模擬I2C信號與MPU6050通訊,實現航空姿態儀表可視化顯示。MPU6050采集數據,T5L0芯片進行數據讀取和濾波算法處理,計算出姿態數據
2022-05-31 11:30:30776 
MPU6050使用互補濾波與卡爾曼濾波算法進行姿態解算
2023-08-07 15:46:562
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論