 電子發(fā)燒友App
電子發(fā)燒友App


1、引言
CCD圖像傳感器由于靈敏度高、噪聲低,逐步成為圖像傳感器的主流。但由于工藝上的原因,敏感元件和信號處理電路不能集成在同一芯片上,造成由CCD圖像 傳感器組裝的攝像機(jī)體積大、功耗大。CMOS圖像傳感器以其體積小、功耗低在圖像傳感器市場上獨(dú)樹一幟。但最初市場上的CMOS圖像傳感器,一直沒有擺脫 光照靈敏度低和圖像分辨率低的缺點(diǎn),圖像質(zhì)量還無法與CCD圖像傳感器相比。
如果把CMOS圖像傳感器的光照靈敏度再提高5倍~10 倍,把噪聲進(jìn)一步降低,CMOS圖像傳感器的圖像質(zhì)量就可以達(dá)到或略微超過CCD圖像傳感器的水平,同時(shí)能保持體積小、重量輕、功耗低、集成度高、價(jià)位低 等優(yōu)點(diǎn),如此,CMOS圖像傳感器取代CCD圖像傳感器就會成為事實(shí)。
由于CMOS圖像傳感器的應(yīng)用,新一代圖像系統(tǒng)的開發(fā)研制得到了 極大的發(fā)展,并且隨著經(jīng)濟(jì)規(guī)模的形成,其生產(chǎn)成本也得到降低。現(xiàn)在,CMOS圖像傳感器的畫面質(zhì)量也能與CCD圖像傳感器相媲美,這主要?dú)w功于圖像傳感器 芯片設(shè)計(jì)的改進(jìn),以及亞微米和深亞微米級設(shè)計(jì)增加了像素內(nèi)部的新功能。實(shí)際上,更確切地說,CMOS圖像傳感器應(yīng)當(dāng)是一個圖像系統(tǒng)。一 個典型的CMOS圖像傳感器通常包含:一個圖像傳感器核心(是將離散信號電平多路傳輸?shù)揭粋€單一的輸出,這與CCD圖像傳感器很相似),所有的時(shí)序邏輯、 單一時(shí)鐘及芯片內(nèi)的可編程功能,比如增益調(diào)節(jié)、積分時(shí)間、窗口和模數(shù)轉(zhuǎn)換器。事實(shí)上,當(dāng)一位設(shè)計(jì)者購買了CMOS圖像傳感器后,他得到的是一個包括圖像陣 列邏輯寄存器、存儲器、定時(shí)脈沖發(fā)生器和轉(zhuǎn)換器在內(nèi)的全部系統(tǒng)。與傳統(tǒng)的CCD 圖像系統(tǒng)相比,把整個圖像系統(tǒng)集成在一塊芯片上不僅降低了功耗,而且具有重量較輕,占用空間減少以及總體價(jià)格更低的優(yōu)點(diǎn)。
圖1 早期的CCD圖像傳感器
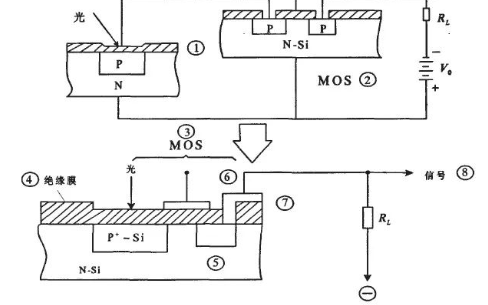
2、基本原理
從某一方面來說,CMOS圖像傳感器在每個像素位置內(nèi)都有一個放大器,這就使其能在很低的帶寬情況下把離散的電荷信號包轉(zhuǎn)換成電壓輸出,而且也僅需要在 幀速率下進(jìn)行重置。CMOS圖像傳感器的優(yōu)點(diǎn)之一就是它具有低的帶寬,并增加了信噪比。由于制造工藝的限制,早先的CMOS圖像傳感器無法將放大器放在像 素位置以內(nèi)。這種被稱為PPS的技術(shù),噪聲性能很不理想,而且還引來對CMOS圖像傳感器的種種干擾。
然而今天,隨著制作工藝的提高, 使在像素內(nèi)部增加復(fù)雜功能的想法成為可能。現(xiàn)在,在像素位置以內(nèi)已經(jīng)能增加諸如電子開關(guān)、互阻抗放大器和用來降低固定圖形噪聲的相關(guān)雙采樣保持電路以及消 除噪聲等多種附加功能。實(shí)際上,在Conexant公司(前Rockwell半導(dǎo)體公司)的一臺先進(jìn)的CMOS 攝像機(jī)所用的CMOS圖傳感器上,每一個像素中都設(shè)計(jì)并使用了6個晶體管,測試到的讀出噪聲只有1均方根電子。不過,隨著像素內(nèi)電路數(shù)量的不斷增加,留給 感光二極管的空間逐漸減少,為了避免這個比例(又稱占空因數(shù)或填充系數(shù))的下降,一般都使用微透鏡,這是因?yàn)槊總€像素位置上的微小透鏡都能改變?nèi)肷涔饩€的 方向,使得本來會落到連接點(diǎn)或晶體管上的光線重回到對光敏感的二極管區(qū)域。
因?yàn)殡姾杀幌拗圃谙袼匾詢?nèi),所以CMOS圖像傳感器的另一個 固有的優(yōu)點(diǎn)就是它的防光暈特性。在像素位置內(nèi)產(chǎn)生的電壓先是被切換到一個縱列的緩沖區(qū)內(nèi),然后再被傳輸?shù)捷敵龇糯笃髦校虼瞬粫l(fā)生傳輸過程中的電荷損耗 以及隨后產(chǎn)生的光暈現(xiàn)象。它的不利因素是每個像素中放大器的閾值電壓都有細(xì)小的差別,這種不均勻性就會引起固定圖像噪聲。然而,隨著CMOS圖像傳感器的 結(jié)構(gòu)設(shè)計(jì)和制造工藝的不斷改進(jìn),這種效應(yīng)已經(jīng)得到顯著弱化。
這種多功能的集成化,使得許多以前無法應(yīng)用圖像技術(shù)的地方現(xiàn)在也變得可行 了,如孩子的玩具,更加分散的保安攝像機(jī)、嵌入在顯示器和膝上型計(jì)算機(jī)顯示器中的攝像機(jī)、帶相機(jī)的移動電路、指紋識別系統(tǒng)、甚至于醫(yī)學(xué)圖像上所使用的一次 性照相機(jī)等,這些都已在某些設(shè)計(jì)者的考慮之中。
3設(shè)計(jì)考慮
然而,這個行業(yè)還有一 個受到普遍關(guān)注的問題,那就是測量方法,具體指標(biāo)、陣列大小和特性等方面還缺乏統(tǒng)一的標(biāo)準(zhǔn)。每一位工程師在比較各種資料一覽表時(shí),可能會發(fā)現(xiàn)在一張表上列 出的是關(guān)于讀出噪聲或信噪比的資料,而在另一張表上可能只是強(qiáng)調(diào)關(guān)于動態(tài)范圍或最大勢阱容量的資料。因此,這就要求設(shè)計(jì)者們能夠判斷哪一個參數(shù)對他們最重 要,并且盡可能充分利用多產(chǎn)品的CMOS圖像傳感器家族。
一些關(guān)鍵的性能參數(shù)是任何一種圖像傳感器都需要關(guān)注的,包括信噪比、動態(tài)范 圍、噪聲(固定圖形噪聲和讀出噪聲)、光學(xué)尺寸以及電壓的要求。應(yīng)當(dāng)知道并用來對比的重要參數(shù)有:最大勢阱容量、各種工作狀態(tài)下的讀出噪聲、量子效率以及 暗電流,至于信噪比之類的其它參數(shù)都是由那些基本量度推導(dǎo)出來的。
對于像保安攝像機(jī)一類的低照度級的應(yīng)用,讀出噪聲和量子效應(yīng)最重要。然而對于象戶外攝影一類的中、高照度級的應(yīng)用,比較大的最大勢阱容量就顯得更為重要。
動態(tài)范圍和信噪比是最容易被誤解和誤用的參數(shù)。動態(tài)范圍是最大勢阱容量與最低讀出噪聲的比值,它之所以引起誤解,是因?yàn)樽x出噪聲經(jīng)常不是在典型的運(yùn)行速 度下測得的,而且暗電流散粒噪聲也常常沒有被計(jì)算在內(nèi)。信噪比主要決定于入射光的亮度級(事實(shí)上,在亮度很低的情況下,噪聲可能比信號還要大)。
所以,信噪比應(yīng)該將所有的噪聲源都考慮在內(nèi),有些資料一覽表中常常忽略散粒噪聲,而它恰恰是中、高信號電平的主要噪聲來源。而SNRDARK得到說明, 實(shí)際上與動態(tài)范圍沒有什么兩樣。數(shù)字信噪比或數(shù)字動態(tài)范圍是另一個容易引起混淆的概念,它表明的只是模擬/數(shù)字(A/D)轉(zhuǎn)換器的一個特性。雖然這可能很 重要,但它并不能精確地描述圖像的質(zhì)量。同時(shí)我們也應(yīng)清楚地認(rèn)識到,當(dāng)圖像傳感器具有多個可調(diào)模擬增益設(shè)置時(shí),模擬/數(shù)字轉(zhuǎn)換器的分辨率不會對圖像傳感器 的動態(tài)范圍產(chǎn)生限制。
光學(xué)尺寸的概念的模糊,是由于傳統(tǒng)觀念而致。使用光導(dǎo)攝像管只能在部分范圍內(nèi)產(chǎn)生有用的圖像。它的計(jì)算包括度量單 位的轉(zhuǎn)換和向上舍入的方法。采用向上舍入的方法,先以毫米為單位測量圖像傳感器的對角線除以16,就能得到以英寸為單位的光學(xué)尺寸。例如0.97cm的尺 寸是1.27cm而不是 0.85cm。假如你選擇了一個光學(xué)尺寸為0.85cm的圖像傳感器,很可能出現(xiàn)圖像的四周角落上的映影(陰影)現(xiàn)象。這是因?yàn)橛行┵Y料一覽表欺騙性地使 用了向下舍入的方法。例如,將0.97cm的尺寸稱為0.85cm,理由很簡單:0.85cm光學(xué)尺寸的圖像傳感器的價(jià)格要比1.27cm光學(xué)尺寸的圖像 傳感器的價(jià)格低得多,但是這對系統(tǒng)工作性能產(chǎn)生不利影響。所以,設(shè)計(jì)者應(yīng)該通過計(jì)算試用各種不同的圖像傳感器來得到想要的性能。
CMOS圖像傳感器的一個很大的優(yōu)點(diǎn)就是它只要求一個單電壓來驅(qū)動整個裝置。不過設(shè)計(jì)者仍應(yīng)謹(jǐn)慎地布置電路板驅(qū)動芯片。根據(jù)實(shí)際要求,數(shù)字電壓和模擬電壓 之間盡可能地分離開以防止串?dāng)_。因此良好的電路板設(shè)計(jì),接地和屏蔽就顯得非常重要。盡管這種圖像傳感器是一個CMOS裝置并具有標(biāo)準(zhǔn)的輸入/輸出(I /O)電壓,但它實(shí)際的輸入信號相當(dāng)小,而且對噪聲也很敏感。
到目前為止,已設(shè)計(jì)出高集成度單芯片CMOS圖像傳感器。設(shè)計(jì)者力求使有 關(guān)圖像的應(yīng)用更容易實(shí)現(xiàn)多功能,包括自動增益控制(AGC)、自動曝光控制(AEC)、自動平衡(AMB)、伽瑪樣正、背景補(bǔ)償和自動黑電平校正。所有的 彩色矩陣處理功能都集成在芯片中。CMOS圖像傳感器允許片上的寄存器通過I2C總線對攝像機(jī)編程,具有動態(tài)范圍寬、抗浮散且?guī)缀鯖]有拖影的優(yōu)點(diǎn)。
4、CMOS APS的潛在優(yōu)點(diǎn)和設(shè)計(jì)方法
4.1CMOS APS勝過CCD圖像傳感器的潛在優(yōu)點(diǎn)
CMOS APS勝過CCD圖像傳感器的潛在優(yōu)點(diǎn)包括[1]~[5]:
1)消除了電荷反復(fù)轉(zhuǎn)移的麻煩,免除了在輻射條件下電荷轉(zhuǎn)移效率(CTE)的退化和下降。
2)工作電流很小,可以防止單一振動和信號閉鎖。
3)在集成電路芯片中可進(jìn)行信號處理,因此可提供芯跡線,模/數(shù)轉(zhuǎn)換的自調(diào)節(jié),也能提供由電壓漂移引起的輻射調(diào)節(jié)。
4.2 CMOS APS的設(shè)計(jì)方法
CMOS APS的設(shè)計(jì)方法包括:
1)為了降低暗電流而進(jìn)行研制創(chuàng)新的像素結(jié)構(gòu)。
2)使用耐輻射的鑄造方,再研制和開發(fā)中等尺寸“dumb”(啞)成像儀(通過反復(fù)地開發(fā)最佳像素結(jié)構(gòu))。
3)研制在芯片上進(jìn)行信號處理的器件,以適應(yīng)自動調(diào)節(jié)本身電壓Vt的漂移和動態(tài)范圍的損失。
4)研制和開發(fā)耐輻射(單一擾動環(huán)境)的定時(shí)和控制裝置。
5)研制和加固耐輻射的模/數(shù)轉(zhuǎn)換器。
6)尋找低溫工作條件,以便在承受最大幅射強(qiáng)度時(shí),找到并證實(shí)最佳的工作溫度。
7)研制和開發(fā)大尺寸、全數(shù)字化、耐輻射的CMOS? APS,以便生產(chǎn)。
8)測試、評價(jià)和鑒定該器件的性能。
9)引入當(dāng)代最高水平的組合式光學(xué)通信/成像系統(tǒng)測試臺。
CMOS圖像傳感器的前途是光明的,隨著多媒體、數(shù)字電視、可視通訊等市場的增加,CMOS圖像傳感器的應(yīng)用前景更加廣闊。CMOS APS為MIS/CCD圖像傳感器設(shè)計(jì)提供了另一選擇方案,它把電荷轉(zhuǎn)換成電壓所需的晶體管裝在每個像素內(nèi)。在這種器件內(nèi)均不必進(jìn)行電荷轉(zhuǎn)移, 因?yàn)閿?shù)據(jù)讀取是在單個像素內(nèi)完成的。與CCD圖像傳感器相比,這種器件有很成熟的CMOS集成電路工藝,在降低成本方面有潛力。預(yù)期CMOS APS在許多非科學(xué)應(yīng)用領(lǐng)域內(nèi)將最終替代CCD圖像傳感器。
像素傳感器電路結(jié)構(gòu)設(shè)計(jì)詳情參見:CMOS圖像傳感器的基本原理及設(shè)計(jì)考慮
全面了解了COMS傳感器的原理及設(shè)計(jì)考慮的主要因素,下面介紹幾種CMOS圖像傳感器應(yīng)用方案和參考設(shè)計(jì)。
安森美CMOS圖像傳感器應(yīng)用方案
?
近年來,隨著CMOS工藝技術(shù)的不斷改進(jìn),CMOS傳感器的應(yīng)用范圍也越來越廣泛,包括數(shù)碼相機(jī)、電腦攝像頭、視頻電話、手機(jī)、視頻會議、智能型安保系統(tǒng)、汽車倒車視像雷達(dá)、玩具,以及工業(yè)、醫(yī)療等應(yīng)有盡有。實(shí)際上,CMOS圖像傳感器最初應(yīng)用于工業(yè)圖像處理;在那些旨在提高生產(chǎn)率、質(zhì)量和生產(chǎn)工藝經(jīng)濟(jì)性的全新自動化解決方案中,它至今仍然是至關(guān)重要的圖像解決方案。
安森美半導(dǎo)體的標(biāo)準(zhǔn)及定制CMOS圖像傳感器方案
應(yīng)用要求的不斷提升,CMOS傳感器的成像質(zhì)量也在不斷提高,安森美半導(dǎo)體利用其在這一領(lǐng)域的專利技術(shù)和豐富的經(jīng)驗(yàn),以創(chuàng)新的設(shè)計(jì),采用標(biāo)準(zhǔn)CMOS工藝技術(shù)開發(fā)出了高性能CMOS有源像素傳感器等多種產(chǎn)品。
過去15年來,安森美半導(dǎo)體一直在為數(shù)百萬像素?cái)?shù)碼攝影、達(dá)晶圓級的大面積傳感器、超高速傳感器、機(jī)器視覺成像、線性和二維條碼成像、醫(yī)用X射線成像、單芯片一體化攝像機(jī),以及太空和核應(yīng)用的抗輻射CMOS圖像傳感器提供行之有效的解決方案。
1)標(biāo)準(zhǔn)圖像傳感器
新興應(yīng)用需求的不斷增長為精心設(shè)計(jì)的CMOS圖像傳感器帶來了眾多商機(jī)。除此高端機(jī)器視覺應(yīng)用,二維(2D)條形碼閱讀器、高端保安攝像方案以及新興的 智能交通管理系統(tǒng)(ITS)的市場也在迅速擴(kuò)大。安森美半導(dǎo)體新的VITA系列能滿足這些新市場的需求。VITA提供可配置性、靈活性和操作方便性。
圖1 VITA25K 2,500萬像素、53 fps全局快門CMOS圖像傳感器示例
VITA 系列CMOS圖像傳感器采用可配置操作模式,易于操作,提供帶雙斜率讀數(shù)的流水線型和觸發(fā)式全局快門、帶相關(guān)雙采樣(CDS)的滾動快門、LVDS或 CMOS輸出、10位或8位精度、多個并行窗口讀數(shù)等特性。應(yīng)用范圍包括機(jī)器視覺、條形碼、智能交通管理系統(tǒng)(ITS)和運(yùn)動監(jiān)測(motion monitoring)。
安森美半導(dǎo)體的另一個標(biāo)準(zhǔn)圖像傳感器系列是LUPA。該系列是高速CMOS圖像傳感器的深入研發(fā)和豐富經(jīng)驗(yàn)的結(jié)晶。LUPA器件提供的分辨率高達(dá)2048 × 2048,幀速率最高達(dá)500 fps。這些器件的功耗低至150 mW,完全沒有光暈(Blooming)或滯后,為高度可靠、高靈敏度圖像傳感器創(chuàng)建了一個完善的基礎(chǔ)。LUPA系列包含LUPA 300、LUPA 1300-2、LUPA 3000和LUPA 4000。
LUPA實(shí)現(xiàn)了前所未有的靈敏度,具有百萬像素系列圖像傳感器的分辨率,其它特性包括低功耗、無光暈或圖像滯后、采用流水線式全局快門,可廣泛應(yīng)用于高速機(jī)器視覺、工業(yè)成像、醫(yī)療成像、國防和運(yùn)動分析等領(lǐng)域。
另外一個CMOS標(biāo)準(zhǔn)圖像傳感器的系列是IBIS,包括IBIS4和IBIS5圖像傳感器。IBIS4圖像傳感器的特點(diǎn)是圖像質(zhì)量高、三晶體管(3T) 像素、滾動快門、高填充因數(shù)和用來提高動態(tài)范圍的雙斜率讀數(shù)。IBIS5 CMOS圖像傳感器進(jìn)過優(yōu)化,是專門為機(jī)器視覺相機(jī)而開發(fā)的。
圖2? IBIS系列圖像傳感器
IBIS4的像素分辨率高達(dá)1,400萬,圖像質(zhì)量高,具有滾動快門和靈活的窗口和多斜率功能;IBIS5采用觸發(fā)式全局快門,操作模式靈活,具有靈活的窗口和多斜率功能。它們的應(yīng)用包括機(jī)器視覺、生物測量和文檔掃描等。
安森美半導(dǎo)體標(biāo)準(zhǔn)系列的STAR圖像傳感器系列,是開發(fā)抗輻射CMOS像素和讀出電子產(chǎn)品過程中廣泛研究和輻照實(shí)驗(yàn)的成果。這些結(jié)構(gòu)的總輻照劑量高達(dá) 300 krad。抗輻射CMOS圖像傳感器可以在輻射環(huán)境下發(fā)揮重要的作用,而普通CMOS或CCD成像無法做到這一點(diǎn),而使用CRT顯像管又太昂貴、過重或體 積過大。STAR系列包括三個產(chǎn)品:STAR 250、STAR 1000和HAS2,每個產(chǎn)品都有自己獨(dú)到的優(yōu)勢。
總體上講,STAR高達(dá)100萬像素分辨率,具有高抗輻射、高靈敏度、低噪聲的優(yōu)勢;可以應(yīng)用在太空科學(xué)、核檢驗(yàn)、星跟蹤器和太陽傳感器等方面。
2)定制圖像傳感器
安森美半導(dǎo)體還提供定制和針對特定應(yīng)用的CMOS圖像傳感器,通過開發(fā)具有最先進(jìn)性能的產(chǎn)品,幫助合作伙伴領(lǐng)先于競爭對手。定制設(shè)計(jì)可根據(jù)內(nèi)部開發(fā)的參數(shù)功能塊或采用全新的方法實(shí)現(xiàn)前所未有的性能和功能。
安森美半導(dǎo)體的專利設(shè)計(jì)和制造技術(shù)有助于優(yōu)化關(guān)鍵參數(shù),并與客戶的應(yīng)用實(shí)現(xiàn)完美契合。像素的大小、形狀和速度、飽和度和噪聲水平、動態(tài)范圍和靈敏度、輸出和幀速率都可以根據(jù)每個客戶的需求來設(shè)定。
定制解決方案充分考慮了規(guī)格的靈活性,可實(shí)現(xiàn)最終應(yīng)用的關(guān)鍵差別化,保證整個產(chǎn)品壽命期的有效性;高層次的架構(gòu)和操作靈活性可以提高性能。定制方案的應(yīng) 用包括高分辨率攝影、高速成像、條形碼閱讀、機(jī)器視覺、醫(yī)療成像,尤其是需要低功耗、智能傳感或抗輻射的陣列或線性傳感器解決方案的任何應(yīng)用。
安森美半導(dǎo)體為客戶提供的典型自定義設(shè)計(jì)周期流程是客戶提出最初需求,然后由安森美半導(dǎo)體提出建議,再經(jīng)過預(yù)先研究、產(chǎn)品定義、產(chǎn)品設(shè)計(jì)、產(chǎn)品設(shè)計(jì)審查、原型制造、裝配和功能測試、原型、性能表征、性能表征報(bào)告等過程,最后做出生產(chǎn)規(guī)劃和生產(chǎn)計(jì)劃,進(jìn)行預(yù)生產(chǎn)和投產(chǎn)。
3)智能手機(jī)CMOS圖像傳感器
安森美半導(dǎo)體為高性能智能手機(jī)傳感器開發(fā)了創(chuàng)新的 1.1 μm像素技術(shù),先進(jìn)的像素和顏色濾波陣列 (CFA) 處理,使其靈敏度比前代提升近 20%。世界一流的的靈敏度能捕捉到更多光,使圖像質(zhì)量顯著提高,尤其是在微光的情況下。新一代1,300萬像素(MP)圖像傳感器AR1335,擴(kuò)充其寬廣的圖像產(chǎn)品系列。基于先進(jìn)的1.1微米(μm)像素技術(shù),AR1335確立了靈敏度新基準(zhǔn),量子效率 (QE) 和線性電位井容量也得以顯著提升。這圖像傳感器專為智能手機(jī)相機(jī)應(yīng)用而設(shè)計(jì),帶來近乎數(shù)碼相機(jī)的成像優(yōu)質(zhì)體驗(yàn),同時(shí)也針對移動設(shè)備優(yōu)化了功耗和占板空間。
AR1335為智能手機(jī)用戶帶來絕佳的成像體驗(yàn)。一流的靈敏度、QE和線性電位井容量讓客戶領(lǐng)略逼真的微光成像。超清13 MP分辨率支持高質(zhì)量變焦及清晰的場景細(xì)節(jié)還原。無論是4K 超高清(UHD)模式,每秒30幀的影院模式,還是每秒60幀的1080P高清模式,均可呈現(xiàn)專業(yè)視頻品質(zhì)。極高的32°主光線角度(CRA)支持低垂直 高度應(yīng)用。
安森美半導(dǎo)體圖像傳感器部消費(fèi)影像副總裁Shung Chieh說:“AR1335圖像傳感器是工程創(chuàng)意和客戶導(dǎo)向的結(jié)晶成果。我們提升技術(shù),加上智能設(shè)計(jì)和優(yōu)化的生產(chǎn)工藝,為那些希望用自己的產(chǎn)品提供全面、豐富拍照體驗(yàn)的智能手機(jī)制造商帶來高性價(jià)比的解決方案。”
總結(jié)
安森美半導(dǎo)體提供對多重終端市場的完整的一維和二維CMOS圖像傳感器產(chǎn)品,其中既有系列標(biāo)準(zhǔn)圖像傳感器,也有定制及專用產(chǎn)品。標(biāo)準(zhǔn)系列包括最高像素 2,500萬、提供10位或8位精度的VITA系列,能以數(shù)百萬像素分辨率提供最高500 fps幀速率的LUPA系列,提供最高1,400萬像素分辨率及高圖像質(zhì)量的IBIS系列,以及抗輻射及提供高靈敏度的STAR系列。此外,安森美半導(dǎo)體為客戶提供定制及專用CMOS圖像傳感器,幫助客戶以獨(dú)特產(chǎn)品及一流性能領(lǐng)先競爭對手。今后,數(shù)百萬像素?cái)?shù)碼攝影及電影攝影、機(jī)器視覺、線性及二維條形碼成像、工業(yè)及醫(yī)療成像、生物測定及計(jì)算及軍事/航空市場將會有更多應(yīng)用采用安森美半導(dǎo)體的圖像傳感器。
思比科系列CMOS圖像傳感器應(yīng)用方案
近年來,拍照手機(jī)、電腦攝像頭(PC-CAM)、監(jiān)控等領(lǐng)域飛速發(fā)展,需求量日漸增長,CMOS圖像傳感器(CIS)作為這些應(yīng)用的核心元件, 其市場需求也越來越大。CIS芯片集光電、模擬電路和數(shù)字電路于一體,其設(shè)計(jì)、生產(chǎn)、測試、封裝以及最終應(yīng)用與傳統(tǒng)IC相比,都有其特別的地方,因此行業(yè) 門檻也相對較高。
北京思比科作為中國本土企業(yè),是唯一基于自主專利技術(shù)開發(fā)成功高端CMOS圖像傳感器芯片并實(shí)現(xiàn)規(guī)模化生產(chǎn)的企業(yè),近幾年開發(fā)成功了一系列高品質(zhì)圖像傳感器芯片。以下針對拍照手機(jī),PC-CAM和監(jiān)控三個領(lǐng)域的應(yīng)用,具體介紹思比科的系列產(chǎn)品。
1.拍照手機(jī)
拍照手機(jī)可以實(shí)現(xiàn)預(yù)覽、拍照、回顯、錄像和回放的全部功能。從傳感器應(yīng)用的角度,拍照手機(jī)可以分為以下兩類:第一類是 YUV型,即傳感器輸出標(biāo)準(zhǔn)的YUV圖像數(shù)據(jù),多媒體處理器接收后完成圖像的編解碼等后處理,傳感器和多媒體處理器相對獨(dú)立,SP80818(1/8 inch VGA)和SP82318(1/3.2 inch 2M)就是針對這種應(yīng)用設(shè)計(jì)的。第二類是Raw Data型,傳感器只輸出原始數(shù)據(jù),所有的圖像處理和自動控制都由多媒體處理器來主導(dǎo)完成,SP80708(1/7 inch VGA)和SP83308(1/3 inch 3.2M)符合這種應(yīng)用。以下分別介紹兩種方案。
1.1 YUV型
YUV型的方案是目前中低端拍照手機(jī)普遍采用的一種方案,主要集中在VGA,1.3M和2M的拍照手機(jī),要求傳感器輸出標(biāo)準(zhǔn)的YUV數(shù)據(jù)。傳感器除了完 成圖像采集的功能外,還要完成圖像處理和圖像轉(zhuǎn)換的功能。圖1是SP80818和SP82318的結(jié)構(gòu)框圖以及YUV手機(jī)的結(jié)構(gòu)圖。其中傳感器核 (Sensor Core)部分包含有感光陣列、曝光控制和讀出電路、可變增益放大器(PGA)和模數(shù)轉(zhuǎn)換器(ADC),主要完成圖像采集功能。傳感器核輸出的原始圖像數(shù) 據(jù)送到圖像處理器(ISP),ISP完成一系列圖像處理和圖像轉(zhuǎn)換功能,主要包含以下處理:灰度補(bǔ)償、數(shù)字增益和白平衡、鏡頭陰影修正、壞點(diǎn)檢測和修正、 彩色插值、平滑處理和輪廓增強(qiáng)、GAMMA校正、色彩校正、亮度、飽和度和對比度調(diào)節(jié)、圖像尺寸變換、色彩空間轉(zhuǎn)換、圖像數(shù)據(jù)打包輸出。控制模塊完成自動 曝光控制,自動白平衡,50Hz/60Hz閃爍檢測等功能,對傳感器核和ISP進(jìn)行控制,以及和多媒體處理器的通信(多媒體處理器通過串行總線接口訪問傳 感器內(nèi)部寄存器,實(shí)現(xiàn)對傳感器的控制。)
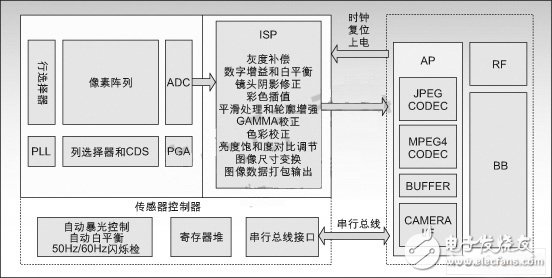
圖1: YUV傳感器SP0818和SP2318的結(jié)構(gòu)框圖及應(yīng)用。
雖然絕大多數(shù)主流的傳感器設(shè)計(jì)公司都是按照以上功能來設(shè)計(jì)自己的產(chǎn)品,但由于設(shè)計(jì)能力和所采用的工藝性能的不同,市面上產(chǎn)品的性價(jià)比仍然會存在較大的差距。
思比科在設(shè)計(jì)這些產(chǎn)品之前,已經(jīng)做了大量的基礎(chǔ)研究,從工藝,算法到電路原理都有了很多的突破,形成了以 SuperPix和SuperImage為核心的技術(shù)特點(diǎn),相關(guān)專利已經(jīng)達(dá)到數(shù)十件以上,SuperPix技術(shù)具體體現(xiàn)在高性能的像素單元(Pixel) 設(shè)計(jì),高精度、高速度和超低功耗的CDS電路,PGA電路和ADC電路設(shè)計(jì);SuperImage技術(shù)則主要包含一系列效果優(yōu)良、實(shí)現(xiàn)簡潔的算法,如自動 白平衡,自動曝光控制,彩色插值,平滑去噪,輪廓增強(qiáng)等。
YUV方案的優(yōu)點(diǎn)在于照相模塊的獨(dú)立性和靈活性。工程師很容易完成不同的傳感器和多媒體處理器之間的對接,而復(fù)雜繁瑣的圖像調(diào)試工作已經(jīng)由照相模塊的供應(yīng)商完成,工程師只需要將多媒體處理器中傳感器的配置參數(shù)更新就可以得到理想的圖像效果。
然而,隨著手機(jī)市場的競爭加劇,客戶對傳感器的性價(jià)比要求越來越高,這種方案的缺點(diǎn)也越來越明顯。由于傳感器工藝的特殊性決定了在設(shè)計(jì)和制造過程中,不 能使用超過4層的金屬連線資源,這將大大增加邏輯關(guān)系復(fù)雜的圖像處理電路的面積,從而增加傳感器的成本。而另一方面,為了降低成本,傳感器的感光單元尺寸 越來越小,為了得到更好的圖像質(zhì)量,需要越來越復(fù)雜的算法對圖像進(jìn)行處理。基于以上原因,ISP的功能已經(jīng)開始從傳感器轉(zhuǎn)移到多媒體處理器。對于規(guī)模龐大 的多媒體處理器來說,ISP的集成對其成本不會有明顯增加,而傳感器的成本則有大幅度下降。因此?Raw Data方案也越來越被關(guān)注。
1.2 Raw Data型
Raw Data型方案是最有爭議的一個方案,系統(tǒng)只要求傳感器輸出原始數(shù)據(jù),后端多媒體處理器完成所有ISP和圖像編解碼等功能,和普通的數(shù)碼相機(jī)的解決方案一 樣,而多媒體處理器則類似于數(shù)碼相機(jī)中的核心處理器。 SP80708和SP83308就是基于這種應(yīng)用方案設(shè)計(jì)的,其結(jié)構(gòu)框圖見圖2。
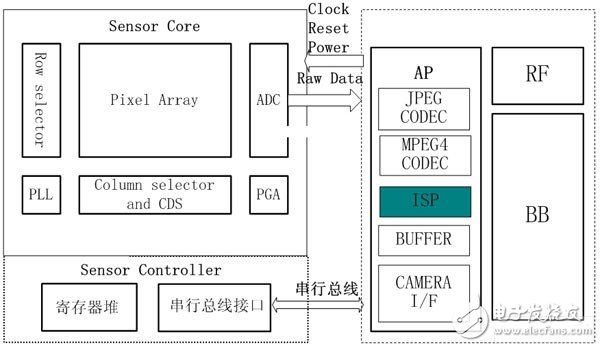
圖2:Raw Data傳感器SP0708和SP3308的結(jié)構(gòu)框圖。
從結(jié)構(gòu)上看,Raw Data型傳感器實(shí)際是YUV 傳感器去掉ISP和部分傳感器控制功能之后的簡化產(chǎn)品。
這種方案在最低端手機(jī)和最高端手機(jī)中都有應(yīng)用。如聯(lián)發(fā)科的MTK6226和展訊6600D+華邦99685,就屬于這一方案在低端手機(jī)上的應(yīng)用。而可以 支持到3.2M Raw Data 傳感器,Broadcom的BCM2820甚至可以支持8M像素的Raw Data 傳感器,很多高端手機(jī)采用了這些方案。
對于3.2M以上的高像素拍照手機(jī),Raw Data方案從系統(tǒng)設(shè)計(jì)的角度講是合理的。高像素的拍照手機(jī)為了取代傳統(tǒng)數(shù)碼相機(jī),對圖像質(zhì)量的要求已經(jīng)達(dá)到專業(yè)級的要求。在提高模擬前端圖像采集性能的 同時(shí),后端復(fù)雜的圖像處理技術(shù)也是必不可少的。要把這些功能復(fù)雜的ISP集成到傳感器中,幾乎很難實(shí)現(xiàn),比如復(fù)雜的彩色插值算法要求保存一幀的Raw Data,需要很大的緩沖,傳感器中不可能做到;而性能越來越高的多媒體處理器,無論是處理能力,還是配備的緩沖,都非常適合來完成這個功能。從整個系統(tǒng) 的結(jié)構(gòu)和性價(jià)比來看,這種方案也是最有競爭力的。
對于低端的VGA拍照手機(jī),傳感器的成本壓力越來越大。Raw Data型的傳感器是降低成本最有效的方案。聯(lián)發(fā)科推出的一系列平臺方案就恰好集成了圖像處理的功能,MTK6226就是最典型的代表。
Raw Data型方案目前也存在缺點(diǎn),它需要傳感器廠商和多媒體芯片或是平臺廠商緊密配合,才能很順利的完成系統(tǒng)集成。尤其是方案設(shè)計(jì)階段,對不同的傳感器,甚 至相同的傳感器搭配不同的鏡頭,都需要基于多媒體芯片重新調(diào)試圖像效果。傳感器廠商只有得到這些平臺廠商的配合,才能完成design-in。
目前手機(jī)市場的情況是YUV型和Raw Data型兩種方案并存。思比科也有針對性的開發(fā)出了不同的產(chǎn)品,來滿足客戶多元化的需求。其中SP0818和SP2318滿足YUV型手機(jī)客戶的需求, 而SP80708和SP83308則符合Raw Data型手機(jī)客戶的要求。
2.PC攝像頭
相對手機(jī)而言,PC攝像頭(PC-CAM)是一個較為簡單的應(yīng)用。由于英特網(wǎng)的普及以及越來越流行的網(wǎng)絡(luò)視頻應(yīng)用,PC-CAM的需求量也非常龐大。SP80708在滿足手機(jī)應(yīng)用的同時(shí),也因?yàn)楦咝詢r(jià)比的優(yōu)勢而被大量使用在PC-CAM上。
PC-CAM的方案非常簡單,一顆DSP搭配一顆傳感器,就組成了一個PC-CAM方案。圖3是一個典型的PC-CAM的結(jié)構(gòu)圖。
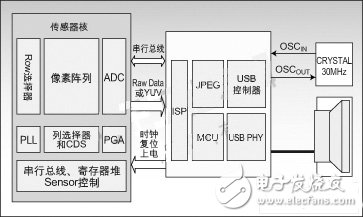
圖3:典型的PC-CAM方案。
SP80708采用了思比科最新的像素技術(shù),感光度高達(dá)1.2V,足以滿足PC-CAM對低照度的嚴(yán)格要求;色彩還原性好,原始數(shù)據(jù)經(jīng)過簡單處理就可以 達(dá)到理想的效果;而像素尺寸縮小到3.2umx3.2um,可以較大幅度降低傳感器成本。同時(shí)內(nèi)嵌思比科特有的曝光控制算法,很大程度上提高了動態(tài)范圍, 在各種光照條件的復(fù)雜環(huán)境下,都能達(dá)到理想的曝光效果。
PC-CAM也有很多種類。從傳感器的分辨率來分,有30萬像素,130萬像素 和200萬像素的PC-CAM,早期甚至還有10萬像素的產(chǎn)品。由于受到USB帶寬的限制,PC-CAM很少有200萬像素以上的產(chǎn)品。從傳感器的類型來 分,有使用Raw Data 傳感器的PC-CAM,也有使用YUV 傳感器的產(chǎn)品;絕大多數(shù)DSP都集成了ISP的功能,但多數(shù)的ISP只支持到VGA,所以大多數(shù)30萬像素的PC-CAM都采用Raw Data的傳感器,或是采用YUV 傳感器的Raw Data輸出,而130萬像素和200萬像素的產(chǎn)品則多使用YUV 傳感器。
從 DSP的功能來分,PC-CAM又可以分為USB1.1和USB2.0兩種,因?yàn)閁SB1.1的帶款很窄,視頻在傳到 PC之前需要壓縮,所以USB1.1的DSP都集成了JPEG壓縮的模塊;而USB2.0則能夠傳輸未經(jīng)壓縮的VGA視頻流,因此USB2.0的PC- CAM視頻質(zhì)量優(yōu)于USB1.1的產(chǎn)品。有些USB2.0的DSP也集成了JPEG模塊,向下兼容USB1.1的應(yīng)用,以保證產(chǎn)品能應(yīng)用在非常低端的PC 上。
隨著市場的多元化發(fā)展,PC-CAM產(chǎn)品的種類也越來越多。如有帶語音輸入功能的、有帶自動聚焦和跟蹤功能的。而最近出現(xiàn)的“免驅(qū)動”的PC-CAM,則有可能成為未來的主流產(chǎn)品。
3.監(jiān)控系統(tǒng)
傳統(tǒng)的監(jiān)控系統(tǒng)幾乎都采用CCD。隨著CMOS 傳感器技術(shù)的發(fā)展,CMOS的品質(zhì)已經(jīng)達(dá)到CCD相當(dāng)?shù)乃健6O(jiān)控系統(tǒng)應(yīng)用的普及,也面臨著降低成本的壓力。低成本的CMOS取代CCD在監(jiān)控系統(tǒng)上應(yīng) 用的趨勢已經(jīng)非常明顯。圖4是采用CMOS 傳感器的監(jiān)控系統(tǒng)的典型結(jié)構(gòu)。
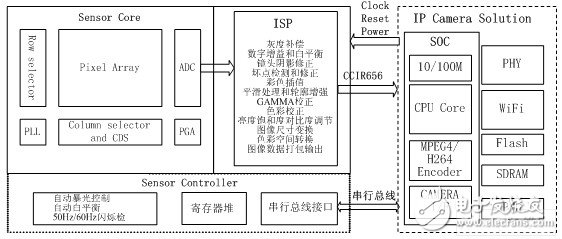
圖4: IP camera解決方案。
傳感器將采集到的高品質(zhì)圖像數(shù)據(jù)轉(zhuǎn)換成標(biāo)準(zhǔn)YUV格式,傳給后邊的處理器,處理器完成對視頻的壓縮,并通過有線或無線網(wǎng)絡(luò),將壓縮后的視頻流發(fā)送出去。 因?yàn)楸O(jiān)控系統(tǒng)的應(yīng)用環(huán)境差別比較大,而且都是處于全天候工作狀態(tài),因此對傳感器的要求非常高,比如傳感器的動態(tài)范圍,靈敏度,溫度特性等,都比普通的傳感 器高出很多。思比科目前正在積極開發(fā)這類產(chǎn)品,預(yù)計(jì)在年內(nèi)推出新一代寬動態(tài)范圍,高靈敏度的傳感器,滿足監(jiān)控領(lǐng)域的應(yīng)用需求。
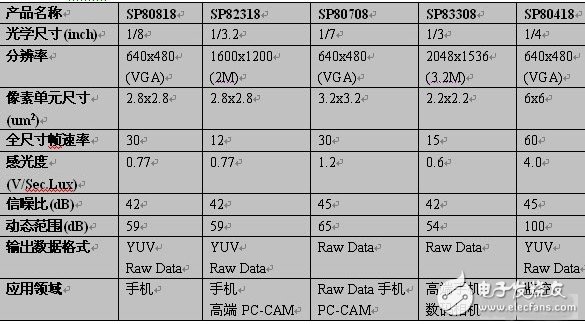
思比科的產(chǎn)品完全根據(jù)客戶的需求設(shè)計(jì),具有性價(jià)比高,應(yīng)用方便的特點(diǎn)。表1總結(jié)了思比科系列產(chǎn)品的技術(shù)指標(biāo),這些產(chǎn)品適用于各種解決方案,可以滿足絕大多數(shù)客戶的需求。
表1: 思比科系列產(chǎn)品指標(biāo)。
基于USB傳輸及CMOS圖像傳感器的指紋識別儀的實(shí)現(xiàn)
引 言
CMOS圖像傳感器是近年來得到快速發(fā)展的一種新型固態(tài)圖像傳感器。它將圖像傳感部分和控制電路高度集成在同一芯片里,體積明顯減小、功耗也大大降低,滿足了對高度小型化、低功耗成像系統(tǒng)的要求。與傳統(tǒng)的CCD圖像傳感器相 比,CMOS圖像傳感器還具有集成度高、控制簡單、價(jià)格低廉等諸多優(yōu)點(diǎn)。因此隨著CMOS集成電路工藝的不斷進(jìn)步和完善,CMOS圖像傳感器已經(jīng)廣泛應(yīng)用 于各種通用圖像采集系統(tǒng)中。同時(shí)作為一種PC機(jī)與外圍設(shè)備間的高速通信接口,USB具有許多突出的有點(diǎn): 連接簡便,可熱插拔,無需定位及運(yùn)行安裝程序,無需連接外設(shè)時(shí)關(guān)機(jī)及重啟系統(tǒng),實(shí)現(xiàn)真正的即插即用;高傳輸速率,USB1.1協(xié)議支持12Mb/s;不占 用系統(tǒng)硬件資源,能夠自動檢測和配置外圍設(shè)備,不存在硬件沖突問題。
因此,利用CMOS數(shù)字圖像傳感器與USB接口數(shù)據(jù)傳輸來實(shí)現(xiàn)的指 紋識別儀具有結(jié)構(gòu)簡單,體積小,便攜化等優(yōu)點(diǎn)。現(xiàn)將介紹利用OMniVision公司的CMOS彩色數(shù)字圖像傳感器OV762M和cypress公司的 EZ—USB AN2131QC USB控制傳輸芯片(內(nèi)部集成了增強(qiáng)形51內(nèi)核)來實(shí)現(xiàn)指紋信息的采集和USB傳輸,同時(shí)由于指紋傳感器輸出數(shù)據(jù)的速率(27MB/s)與USB控制器 (AN2131QC)數(shù)據(jù)傳輸速率(12Mb/s)的不匹配,故系統(tǒng)采用了SRAM和CPLD構(gòu)成中間高速緩沖區(qū)。
系統(tǒng)結(jié)構(gòu)
應(yīng)用AN2131QC、CPLD和OV762M設(shè)計(jì)的指紋識別系統(tǒng)硬件框圖如圖1所示:
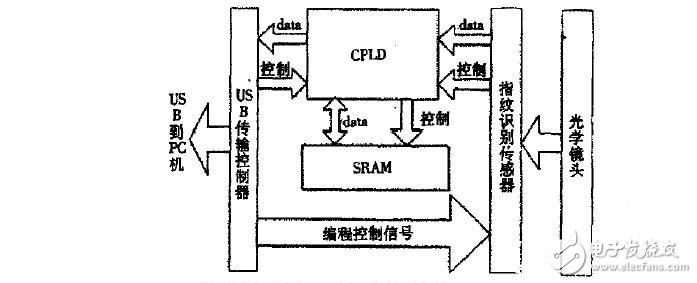
圖1 指紋識別硬件系統(tǒng)簡略框架圖
首先,AN2131QC通過I2C對指紋識別傳感器(OV7620)的窗口設(shè)置等參數(shù)進(jìn)行配置,光學(xué)透鏡把像成在OV762M的像面上后,CMOS圖像 傳感器(OV7620)對其進(jìn)行空間采樣,并按照一定的幀頻連續(xù)輸出8位的數(shù)字圖像數(shù)據(jù)Y[7∶M](輸出數(shù)字圖像數(shù)據(jù)的幀同步信號為VSYNC,水平有 效信號為HREF,輸出時(shí)鐘信號為PCLK)。為了實(shí)現(xiàn)指紋傳感器輸出數(shù)據(jù)與USB控制器(AN2131QC)讀取數(shù)據(jù)速度與時(shí)序的匹配,使用了 SRAM(IS61C1024)和CPLD構(gòu)成高速緩沖區(qū),利用此高速緩沖區(qū)將OV762M采集的指紋數(shù)據(jù)緩存。最后AN2131QC實(shí)現(xiàn)與上位機(jī)的 USB通信,將高速緩沖區(qū)中數(shù)據(jù)的傳輸?shù)絇C機(jī)進(jìn)行相應(yīng)圖像處理。
CMOS數(shù)字圖像傳感器OV7620
CMOS數(shù)字圖像傳感器OV762M集成了一個664×492 的感光陣列、幀(行)控制電路、視頻時(shí)序產(chǎn)生電路、模擬信號處理電路、A/D轉(zhuǎn)換電路、數(shù)字信號輸出電路及寄存器I2C編程接口。感光陣列得到原始的彩色 圖像信號后,模擬處理電路完成諸如顏色分離與均衡、增益控制、gamMA校正、白電平調(diào)整等主要的信號處理工作,最后可根據(jù)需要輸出多種標(biāo)準(zhǔn)的視頻信號。 視頻時(shí)序產(chǎn)生電路用于產(chǎn)生行同步、場同步、混合視頻同步等多種同步信號和像素時(shí)鐘等多種內(nèi)部時(shí)鐘信號,外部控制器可通過I2C總線接口設(shè)置或讀取 OV762M的工作狀態(tài)、工作方式以及數(shù)據(jù)的輸出格式等。
AN2131QC通過I2C總線接口設(shè)定OV762M的寄存器來控制輸出幀率 在0.5幀/s~3M幀/s之間變化,輸出窗口在4×2~664×492 之間可調(diào)(默認(rèn)輸出640×48M的標(biāo)準(zhǔn)VGA格式),設(shè)置黑白平衡等。根據(jù)指紋采集的需要,窗口輸出設(shè)置為: 320×288,經(jīng)過設(shè)定后的OV762M輸出時(shí)序如圖2 所示:

圖2 0V762M輸出時(shí)序
VSYNC是垂直場同步信號(也是每幀同步信號,CMOS是按列采集圖像的),其下降沿表示一幀圖像的開始,HREF 提供了一種有效的控制方式,當(dāng)輸出像素行列分別處于設(shè)定窗口之間時(shí)HREF 為有效高電平,此時(shí)輸出有效的視頻數(shù)據(jù),PCLK是輸出數(shù)據(jù)同步信號,上升沿輸出一個有效的像素Y[7∶M]。
基于CPLD技術(shù)的高速數(shù)據(jù)緩沖區(qū)的實(shí)現(xiàn)
在由CPLD和SRAM構(gòu)成的高速數(shù)據(jù)緩沖區(qū)中,CPLD充當(dāng)了SRAM的控制器,其內(nèi)部電路實(shí)現(xiàn)框圖如圖3所示:
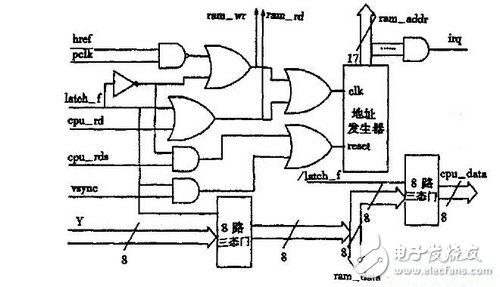
圖3 SRAM高速緩沖區(qū)控制器的CPLD實(shí)現(xiàn)
圖3中ram_rd,raM_wr為輸出到SRAM的讀寫信號線,raM_data,ram_addr為SRAM的數(shù)據(jù)地址總線;latch_f為 SRAM的讀寫允許信號,當(dāng)為高電平時(shí)允許對SRAM寫操作,為低電平時(shí)允許對SRAM讀操作;兩個8路三態(tài)門用于隔離總線,當(dāng)對SRAM寫時(shí),輸出 cpu_datA為高阻態(tài),當(dāng)對SRAM讀時(shí),將采集數(shù)據(jù)信號Y [7∶M]隔離;cpu_rds,vsync為開始讀寫信號,單個正脈沖將SRAM地址置0;cpu_rD作為SRAM快速讀脈沖,pclk為SRAM寫 脈沖;irq為寫滿標(biāo)志,用于向上提供中斷標(biāo)志;地址發(fā)生器用于產(chǎn)生SRAM地址(IS61C1024有17根地址線)。
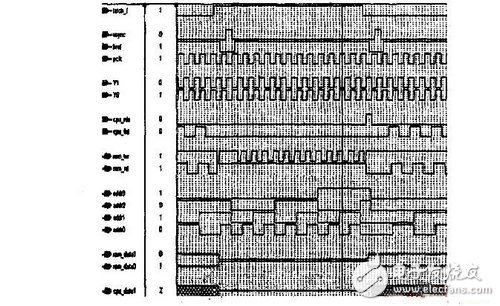
圖4 CPLD實(shí)現(xiàn)的仿真波形
由圖3中邏輯知道,當(dāng)允許對SRAM寫(latch_f=1)且采集的數(shù)據(jù)有效(href=1)時(shí),pclk脈沖通過地址發(fā)生器產(chǎn)生地址(sync單個 正脈沖將SRAM地址復(fù)位到0),將采集的數(shù)據(jù)Y[7∶M]寫入SRAM中,當(dāng)寫滿(寫完一幀的32M像素×288像素)時(shí),irq信號有效,通過中斷將 latch_f置低允許將SRAM數(shù)據(jù)讀出(cpu_rds單個正脈沖將SRAM地址復(fù)位到0),此后cpu_rD通過地址發(fā)生器產(chǎn)生地址將SRAM中數(shù) 據(jù)讀出到USB緩沖區(qū)。上述邏輯仿真波形如圖4 所示(由于數(shù)據(jù)線和地址線較多,故只取其中部分信號時(shí)序,cpu_datA為X 表示其值根據(jù)SRAM數(shù)據(jù)總線上具體值而定),由圖4 可知,CPLD實(shí)現(xiàn)了對SRAM的控制,與SRAM一起組成了高速數(shù)據(jù)緩沖區(qū)。
USB控制接口芯片AN2131QC特性簡介
AN2131QC是基于USB1.1協(xié)議設(shè)計(jì)的,支持高速12Mb/s的傳輸速率,內(nèi)嵌有增強(qiáng)型8051微控制器、8kB的RAM和一個智能USB內(nèi)核 的收發(fā)器,它包含一個I2C總線控制器和3個8位多功能I/O口,有8位數(shù)據(jù)總線和16位地址總線用于外部RAM擴(kuò)展。其結(jié)構(gòu)如圖5所示。
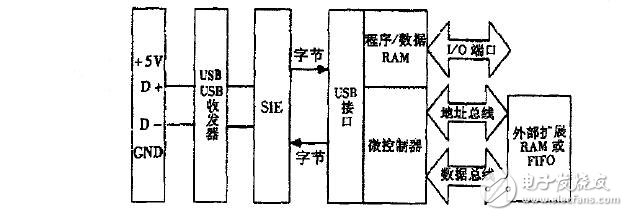
圖5 AN2131QC結(jié)構(gòu)簡圖
AN2131QC內(nèi)部的USB差分收發(fā)器連接到USB總線的D+和D-上。串行接口引擎(SIE)對USB總線上串行數(shù)據(jù)進(jìn)行編碼和譯碼(即實(shí)現(xiàn)USB 協(xié)議的打包和解包工作),同時(shí)執(zhí)行錯誤糾正、位填充及其它USB需要的信號標(biāo)準(zhǔn),這種機(jī)制大大減輕了8051的工作,簡化了固件的編程。內(nèi)核微處理器是一 個增強(qiáng)型8051,其指令周期為4 個時(shí)鐘周期并具有雙DPTR指針,同時(shí)指令與標(biāo)準(zhǔn)8051兼容。它使用內(nèi)部RAM存儲固件程序和數(shù)據(jù),上電后,主機(jī)通過USB總線將固件程序和外設(shè)特性描 述符下載到內(nèi)部RAM(也可以直接從板上E2PROM上讀取),然后重連接,按照下載的特性描速符進(jìn)行重枚舉,這種設(shè)計(jì)可以實(shí)現(xiàn)軟件USB快速批量傳輸?shù)膶?shí)現(xiàn)。
當(dāng)采集的指紋數(shù)據(jù)導(dǎo)入了由SRAM和CPLD構(gòu)成的高速數(shù)據(jù)緩沖緩沖區(qū)后,要通過USB接口將數(shù)據(jù)發(fā)送到上位PC機(jī),AN2131QC必須先將數(shù)據(jù)讀入 到內(nèi)部USB緩沖區(qū),因此,AN2131QC將數(shù)據(jù)傳到內(nèi)部USB緩沖的速度將是整個USB數(shù)據(jù)傳輸速度快慢的關(guān)鍵。為了使USB數(shù)據(jù)傳輸(從外部讀入數(shù) 據(jù)并將之傳到PC機(jī))達(dá)到最快,需要采用很多措施,下面就設(shè)計(jì)指紋識別儀固件(AN2131QC程序)中采用的USB批量傳輸進(jìn)行探討。
正常情況下,AN2131QC內(nèi)核結(jié)構(gòu)從外部讀入數(shù)據(jù)到USB的端點(diǎn)緩沖區(qū),要使用的匯編程序?yàn)椋?/p>
movx a,@dptr;讀外部數(shù)據(jù)到acc寄存器incdptr;外部地址加1
incdps;切換DPTR指針(內(nèi)核有雙DPTR指針,用dps進(jìn)行切換)
movx @dptr,a;將acc內(nèi)容放入U(xiǎn)SB緩沖區(qū)
incdptr;USB緩沖區(qū)地址加1
incdps;切換DPTR指針
由上述程序可知,數(shù)據(jù)在寄存器中完成操作后,都必須有一個“incdptr”和“incdps”指令來完成16位地址的增加和緩沖區(qū)指針切換。為了消除 這種內(nèi)部消耗,使用AN2131QC提供的一種特殊的硬件指針即自動指針(只用于內(nèi)部緩沖區(qū)),8051裝載USB緩沖區(qū)地址到兩個AUTOPTRH (高字節(jié)地址)和AUTOPTRL(低字節(jié)地址)寄存器中,向AUTODATA寫入的數(shù)據(jù)就直接存入由AUTOPTR/H2L指向的地址緩沖區(qū)中,并且內(nèi) 核自動增加AUTOPTR/H2L中16位地址的值。這樣USB緩沖區(qū)可以像FIFO一樣來順序?qū)懭霐?shù)據(jù),節(jié)省了每次寫內(nèi)部USB緩沖區(qū)時(shí)的 “incdptr”指令。同時(shí)內(nèi)核還提供一種快速模式(只用于對外部數(shù)據(jù)操作),此模式從外部讀數(shù)據(jù)“movx a,@dptr”時(shí),直接將外部數(shù)據(jù)總線和內(nèi)部緩沖區(qū)連在一起,由于使用CPLD和SRAM構(gòu)成的指紋高速緩沖區(qū)具有FIFO的性質(zhì),所以使用快速模式讀 外部指紋數(shù)據(jù)時(shí)也節(jié)省了“incdptr”指令。將上述兩種方式結(jié)合起來,讀外部數(shù)據(jù)到內(nèi)部緩沖區(qū)程序就只需要一條指令:movx @dptr,A(dptR存放AUTODATA寄存器地址),此指令需要兩個8051機(jī)器周期(8個24MHz時(shí)鐘周期)。這樣,一個字節(jié)可以在 333ns內(nèi)讀入到USB端點(diǎn)緩沖區(qū)。
在USB接口數(shù)據(jù)傳輸一側(cè),當(dāng)PC機(jī)要對一特定端點(diǎn)進(jìn)行讀數(shù)據(jù)并發(fā)送IN令牌,如果一個IN令牌 到達(dá)時(shí)8051還沒有完成向USB端點(diǎn)緩沖區(qū)的數(shù)據(jù)裝載(讀外部數(shù)據(jù)),AN2131QC就發(fā)送一個NAK握手信號來響應(yīng)IN令牌,表明PC機(jī)應(yīng)該在稍后 再發(fā)送一個IN令牌。為了解決這種等待從而達(dá)到最快的傳輸速度,可以使用雙緩沖技術(shù)(端點(diǎn)配對),使8051在前一個數(shù)據(jù)包在USB總線上傳輸?shù)臅r(shí)候,裝 載塊數(shù)據(jù)的下一個數(shù)據(jù)包。
結(jié) 論
利用CMOS數(shù)字圖像傳感器OV762M和 USB控制器AN2131QC實(shí)現(xiàn)的指紋儀結(jié)構(gòu)簡單,體積小,使用方便。指紋識別系統(tǒng)中使用CPLD技術(shù)實(shí)現(xiàn)了高速緩沖,解決了速度時(shí)序匹配問題;使用了 快速批量USB傳輸技術(shù)實(shí)現(xiàn)了數(shù)據(jù)的快速傳輸,使指紋數(shù)據(jù)的傳輸達(dá)到最高速(每幀傳輸只用80Ms)。使用現(xiàn)論述的方法實(shí)現(xiàn)的指紋儀采集的指紋數(shù)據(jù)經(jīng)PC 機(jī)重現(xiàn)后效果如圖6所示(左圖是未經(jīng)任何處理的重現(xiàn),右圖是經(jīng)過平滑、細(xì)化等算法處理后的重現(xiàn))。

圖6 采集指紋重現(xiàn)效果(處理前后)
新型CMOS圖像傳感器設(shè)計(jì)
金屬氧化物半導(dǎo)體元件(Complementary Metal-Oxide Semiconductor,CMOS)圖像傳感器和電荷耦合元件(Charge Coupled Device,CCD)攝像器件在20年前幾乎是同時(shí)起步的。CCD是應(yīng)用在攝影攝像方面的高端技術(shù)元件,CMOS則應(yīng)用于較低影像品質(zhì)的產(chǎn)品中。
由于CCD器件有光照靈敏度高、噪音低、像素小等優(yōu)點(diǎn),所以在過去15年里它一直主宰著圖像傳感器市場。與之相反,CMOS圖像傳感器過去存在著像素大,信噪比小,分辨率低這些缺點(diǎn),一直無法和CCD技術(shù)抗衡。但是隨著大規(guī)模集成電路技術(shù)的不斷發(fā)展,過去CMOS圖像傳感器制造工藝中不易解決的技術(shù)難關(guān)現(xiàn)已都能找到相應(yīng)解決的途徑,從而大大改善了CMOS圖像傳感器的圖像質(zhì)量。
1 CMOS有源像素傳感器
近來 CMOS圖像傳感器受到重視首要原因在于過去大大低于CCD的靈敏度問題逐步得到解決。因?yàn)榕cCCD相比,CMOS傳感器具有更好的量產(chǎn)性,而且容易實(shí)現(xiàn)包括其他邏輯電路在內(nèi)的SoC(System on Chip)產(chǎn)品,而這在CCD中卻很難實(shí)現(xiàn)。尤其是CMoS傳感器不像CCD那樣需要特殊的制造工藝,因此可直接使用面向DRAM等大批量產(chǎn)品的生產(chǎn)設(shè)備。這樣一來,CMOS圖像傳感器就有可能形成完全不同于CCD圖像傳感器的成本結(jié)構(gòu)。
圖1示出了有源像素CMOS圖像傳感器(ActivePixel Sensor,APS)的功能結(jié)構(gòu)圖,其中成像部分為光敏二極管陣列(Photo Diode Array)。

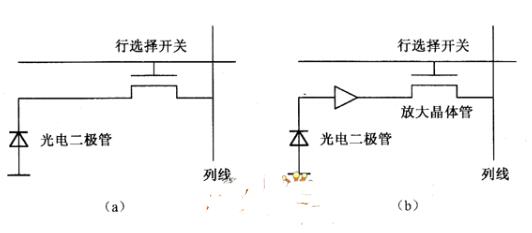
四場效應(yīng)管(4T)有源像素CMOS圖像傳感器的每個像素由光敏二極管、復(fù)位管T2、轉(zhuǎn)移管T1、源跟隨器T3和行選通開關(guān)管T4組成,如圖2所示。

轉(zhuǎn)移管T1被用來將光敏二極管連接至源跟隨器T3,并通過復(fù)位管T2與VDD相連。T3的柵極與T1和T2之間的N+擴(kuò)散區(qū)相連。與3T結(jié)構(gòu)的APS相比,減少了與T3的柵極相關(guān)的漏電流效應(yīng)。源跟隨器T3的作用是實(shí)現(xiàn)對信號的放大和緩沖,改善APS的噪聲問題。T4是用來將信號與列總線相連。其工作過程是:首先進(jìn)入“復(fù)位狀態(tài)”,T2打開,對光敏二極管復(fù)位;然后進(jìn)入“取樣狀態(tài)”,T2關(guān)閉,光照射到光敏二極管上產(chǎn)生光生載流子,并通過源跟隨器T3放大輸出;最后進(jìn)入“讀出狀態(tài)”,這時(shí)行選通管T4打開,信號通過列總線輸出。
APS具有低讀出噪聲和高讀出速率等優(yōu)點(diǎn),但像素單元結(jié)構(gòu)復(fù)雜,填充系數(shù)降低,填充系數(shù)一般只有20%~30%。為了提高像素的填充系數(shù),APS在像素的上方設(shè)置了微透鏡(Micro-lenses),如圖3所示。

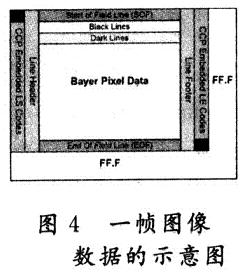
由APS陣列所獲得的圖像信息,經(jīng)過圖1中列模數(shù)轉(zhuǎn)換器(Column ADC)轉(zhuǎn)換為數(shù)字信號后,再經(jīng)過一系列的后續(xù)處理過程,得到輸出如圖4所示的幀圖像數(shù)據(jù)結(jié)構(gòu)。

2 圖像的預(yù)處理過程及方法
為了得到良好的圖像質(zhì)量,需要對所采集的原始圖像數(shù)據(jù)進(jìn)行處理。一般上,圖像的預(yù)處理是在協(xié)處理器中完成的。最近,隨著SoC技術(shù)的發(fā)展,可以在CMOS傳感器中集成圖像預(yù)處理功能.這正顯示了CMOS圖像傳感器的優(yōu)勢所在。
圖像的預(yù)處理主要包括了缺陷修正、去除FPN噪聲、色彩差值,圖像銳化差值、光圈修正、Gamma修正等一系列處理。
通過數(shù)字圖像處理算法來實(shí)現(xiàn)來實(shí)現(xiàn)上述的圖像預(yù)處理過程,其硬件平臺可以是集成在SoC中的圖像處理電路、ASIC圖像處理芯片,或通用的DSP芯片。首先是消除圖像中的缺陷,如果某一個像素中有缺陷,而導(dǎo)致了其輸出電平被鉗位于高電乎(黑點(diǎn))或低電平(白點(diǎn)),就需要通過圖像處理來進(jìn)行彌補(bǔ)。通常是使用其周圍相同顏色像素的平均值來代替該像素的輸出值。
通常情況下,不同列的列模/數(shù)轉(zhuǎn)換器存在著差異,這就導(dǎo)致了固定模式噪聲(fixed Pattern Noise,F(xiàn)PN)的產(chǎn)生。圖4中Black Lines中的數(shù)據(jù)就是用來消除FPN的。協(xié)處理器會利用這一部分?jǐn)?shù)據(jù)來達(dá)到消除FPN的目的。
由于每個像素上為某種彩色濾光片,所以要通過色彩差值來得到其余兩種色彩信息。Gamma修正是為了消除在電學(xué)器件和光學(xué)器件之間在信號傳輸上的非線性效應(yīng)。
從以上的圖像處理過程可知,許多算法中使用了差值,這就導(dǎo)致了圖像的平滑化,而為了恢復(fù)銳利的圖像,就需要進(jìn)行光圈修正。在圖像處理中,通過邊緣檢測而得到的銳化邊緣對差值后的平滑圖像進(jìn)行卷積,從而得到銳利的圖像。
3 結(jié) 語
為了提高CMOS圖像傳感器的圖像質(zhì)量,通過對圖像主要的噪聲源以及圖像失真的分析,本文提出了一種新型的CMOS有源像素圖像傳感器。該CMOS圖像傳感器使用4T有源像素,大大提高了圖像傳感器的靈敏度。通過在傳感器中集成圖像預(yù)處理功能,對改善圖像的質(zhì)量起到了很好的效果。
基于CMOS圖像傳感器的納型衛(wèi)星遙感系統(tǒng)設(shè)計(jì)
納型衛(wèi)星是指質(zhì)量在1~10kg 之間的衛(wèi)星。與微型衛(wèi)星相比, 納型衛(wèi)星對遙感系統(tǒng)在質(zhì)量、體積、功耗等方面的要求更加苛刻。目前廣泛用于微型衛(wèi)星遙感系統(tǒng)的電荷耦合器件CCD很難滿足納型衛(wèi)星的使用要求。CMOS圖 像傳感器采用標(biāo)準(zhǔn)的CMOS 技術(shù), 繼承了CMOS 技術(shù)的優(yōu)點(diǎn), 如靜態(tài)功耗低、動態(tài)功耗與工作頻率成比例、噪聲容限大、抗干擾能力強(qiáng)、特別適合于噪聲環(huán)境惡劣條件下工作、工作速度較快、只需要單一工作電源等。雖然 CMOS 器件的研究還未完全成熟, 如電離環(huán)境下暗電流稍大等問題還沒有很好地解決,還不能完全取代CCD, 但不可否認(rèn)CMOS 器件將是未來遙感傳感器的發(fā)展方向。本文設(shè)計(jì)了一套納型衛(wèi)星CMOS 遙感系統(tǒng), 并對其進(jìn)行了熱循環(huán)實(shí)驗(yàn)研究。
1 納型衛(wèi)星遙感系統(tǒng)的設(shè)計(jì)
1. 1 遙感系統(tǒng)總體設(shè)計(jì)
納星遙感系統(tǒng)如圖1 所示, 包括鏡頭、CMOS圖像傳感器、現(xiàn)場可編程門陣列FPGA、靜態(tài)隨機(jī)存儲器SRAM 和微控制器5 部分。
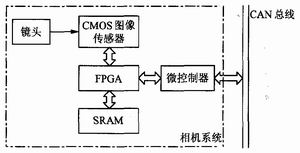
圖1 納星遙感系統(tǒng)框圖
1. 2 光學(xué)系統(tǒng)設(shè)計(jì)
1) 焦距設(shè)計(jì)
遙感相機(jī)光學(xué)系統(tǒng)的原理如圖2 所示。圖中用一個透鏡代表實(shí)際光學(xué)系統(tǒng)的透鏡組, 示意了視場中地面景物的最小可分辨單元在成像面上產(chǎn)生一個相應(yīng)的點(diǎn)。對于衛(wèi)星遙感相機(jī)的光學(xué)系統(tǒng), 因?yàn)槌上裎锞嗟扔谛l(wèi)星軌道高度h, 相對于焦距f 來說可認(rèn)為是無窮遠(yuǎn), 所以可認(rèn)為光線都是近軸的平行光。這些近軸平行光通過光學(xué)系統(tǒng)的透鏡組后, 匯聚在透鏡組的焦平面上。因此, 從透鏡組中心到焦點(diǎn)的距離, 焦距將大體上決定聚光系統(tǒng)的長度, 而光學(xué)系統(tǒng)的理論分辨率則主要由光學(xué)孔徑D決定。
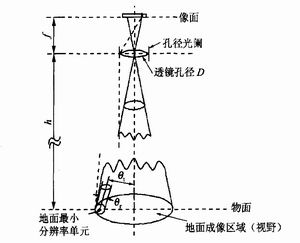
圖2 光學(xué)系統(tǒng)原理圖
在實(shí)際設(shè)計(jì)中, 焦距通常是根據(jù)地面分辨率和圖像傳感器的大小通過下式來確定的:

式中: h為衛(wèi)星到地面的距離, rd為CMOS圖像傳感器探測面半徑, R為相機(jī)成像覆蓋半徑。
2) 光學(xué)孔徑設(shè)計(jì)
為保證成像器件探測面獲得足夠的曝光量, 根據(jù)遙感光學(xué)系統(tǒng)的經(jīng)驗(yàn)計(jì)算相機(jī)光學(xué)系統(tǒng)的光圈數(shù):

實(shí)際設(shè)計(jì)中, 一般取F≤4~5。
遙感相機(jī)光學(xué)系統(tǒng)可近似為望遠(yuǎn)鏡系統(tǒng), 其最小分辨角, 即望遠(yuǎn)鏡分辨率, 可用剛好能分辨開的兩物點(diǎn)對系統(tǒng)的張角θr 表示, 根據(jù)望遠(yuǎn)鏡分辨率和Rayleigh 衍射判據(jù)有如下計(jì)算式:

式中λ為中心波長。光學(xué)系統(tǒng)在平坦地面上的理論分辨率為

式中θt為地物中心對光學(xué)系統(tǒng)的張角。
設(shè)計(jì)中應(yīng)綜合考慮式(2) 和(4) 的結(jié)果, 選定的設(shè)計(jì)參數(shù)在保證遙感系統(tǒng)獲得足夠光照的情況下,要同時(shí)滿足設(shè)計(jì)分辨率的要求。
1. 3 電子系統(tǒng)設(shè)計(jì)
考慮到星地相對運(yùn)動速度, 每幅圖像的曝光時(shí)間約為幾毫秒, 故設(shè)計(jì)中采用現(xiàn)場可編程門陣列(FPGA ) 對CMOS 圖像傳感器進(jìn)行時(shí)序控制, 并將輸出的圖像數(shù)據(jù)保存到SRAM 中。當(dāng)需要傳輸圖像的時(shí)候, 由FPGA 將保存在SRAM 中的圖像數(shù)據(jù)讀出, 通過CAN總線傳至星上數(shù)據(jù)處理系統(tǒng)。
1) 器件選型
CMOS 圖像傳感器按照像元電路可分為無源像素傳感器(PPS) 和有源像素傳感器(APS)。目前國際上能夠買到的分辨率達(dá)到106級以上的CMOS圖像傳感器并不多, 價(jià)格差異也很大, 設(shè)計(jì)中應(yīng)根據(jù)CMOS 圖像傳感器的光學(xué)要求和市場狀況綜合選型。為保證成像質(zhì)量, 納型衛(wèi)星上宜選用CMOS 有源像素傳感器。
FPGA根據(jù)實(shí)現(xiàn)技術(shù)機(jī)理的 不同, 可分為反熔絲型、EPROM或EEPROM型、Flash型、SRAM型等幾種。根據(jù)航天器件要求, FPGA 控制器件宜選擇反熔絲型FPGA 產(chǎn)品。選擇SRAM 時(shí), 主要考慮圖像數(shù)據(jù)量要求以及SRAM的數(shù)據(jù)端口位數(shù)、存取時(shí)間、工作溫度、功耗等因素。
CAN 總線接口的主要任務(wù)是接收星上數(shù)據(jù)處理模塊發(fā)來的命令, 完成對相機(jī)的相關(guān)監(jiān)控, 將獲得的圖像數(shù)據(jù)分時(shí)發(fā)送給星上數(shù)據(jù)處理模塊。本文選用的微處理器在MCS251 系列單片機(jī)的基礎(chǔ)上集成了CAN 控制器, 既可以實(shí)現(xiàn)對遙感系統(tǒng)簡單的監(jiān)控功能, 又可以方便地實(shí)現(xiàn)CAN 通訊功能。
2) FPGA 控制器設(shè)計(jì)
作為相機(jī)成像模塊的控制核心, FPGA 負(fù)責(zé)產(chǎn)生所有重要的控制時(shí)序, 包括產(chǎn)生CMOS 圖像傳感器的工作時(shí)序, 把讀出CMOS 圖像傳感器數(shù)據(jù)存到SRAM 中; 將存放在SRAM 中的圖像數(shù)據(jù)分時(shí)輸出。整個FPGA 的傳輸模型如圖3 所示。
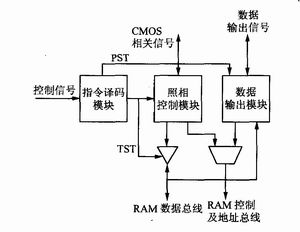
圖3 FPGA 設(shè)計(jì)模型圖
FPGA 對CMOS 圖像傳感器的成像控制如狀態(tài)轉(zhuǎn)換圖4 所示。當(dāng)系統(tǒng)啟動后, FPGA 先向CMOS 圖像傳感器發(fā)出芯片復(fù)位指令, 芯片復(fù)位完成后, 讓Reset 指針沿著像素矩陣逐行移動, 而使Read 指針保持在初始位置(第0行) , 進(jìn)行讀前行復(fù)位。當(dāng)Reset 指針到達(dá)某一目標(biāo)行, 其間所間隔的時(shí)間滿足積分時(shí)間時(shí), 即開始激活Read 指針, 并開始移動Read 指針, 進(jìn)行讀取。如此循環(huán)交替移動兩個指針, 不斷進(jìn)行讀間行復(fù)位、行讀取、讀間等待, 即可保證整個像素陣列各行都符合所要求的積分時(shí)間。
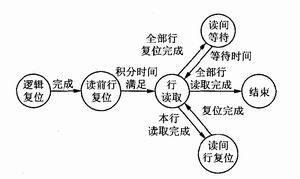
圖4 FPGA 狀態(tài)轉(zhuǎn)換圖
3) CAN 總線接口設(shè)計(jì)
CAN 總線接口的主要任務(wù)是接收星上數(shù)據(jù)處理模塊發(fā)來的命令, 監(jiān)控遙感相機(jī)模塊的工作狀態(tài),包括遙感相機(jī)模塊的電源控制、電流監(jiān)測、溫度監(jiān)測、曝光時(shí)間控制等功能, 并將獲得的圖像數(shù)據(jù)分時(shí)發(fā)送給星上數(shù)據(jù)處理模塊。設(shè)計(jì)上, 星上數(shù)據(jù)處理模塊發(fā)來的指令會使微控制器進(jìn)入中斷, 設(shè)置相應(yīng)的標(biāo)志。微控制器查詢各標(biāo)志的變化, 根據(jù)星上CAN通訊協(xié)議完成相關(guān)動作, 包括監(jiān)測遙感模塊工作溫度、工作電流, 設(shè)置曝光時(shí)間, 進(jìn)行圖像數(shù)據(jù)傳輸?shù)炔僮鳌?/p>
2 納型衛(wèi)星遙感系統(tǒng)的熱循環(huán)實(shí)驗(yàn)
2. 1 實(shí)驗(yàn)系統(tǒng)及方案
為了方便完成在設(shè)計(jì)階段的單模塊調(diào)試, 實(shí)現(xiàn)遙感系統(tǒng)地面原理與性能測試, 本文采用PC機(jī)模擬星上數(shù)據(jù)處理系統(tǒng), 利用CAN 卡將CMOS 相機(jī)與PC機(jī)相連, 建立了一套CMOS遙感系統(tǒng)地面測試系統(tǒng)。
本文采用德國Vtsch IndustrietechnikVT7034 型恒溫實(shí)驗(yàn)箱, 在60~- 5℃溫度區(qū)間內(nèi),每下降5℃采集一組暗圖像。熱循環(huán)實(shí)驗(yàn)之所以按照從高溫到低溫的順序進(jìn)行, 是因?yàn)閷?shí)驗(yàn)所用恒溫箱不能抽真空。如果反過來進(jìn)行實(shí)驗(yàn), 盡管不斷向恒溫箱內(nèi)充氮?dú)猓?箱內(nèi)微量空氣中的水氣仍可能凝結(jié)在相機(jī)上, 影響實(shí)驗(yàn)結(jié)果。
2. 2 特征參數(shù)的提取
1) 平均暗輸出
平均暗輸出是在沒有光照的條件下圖像傳感器輸出的平均灰度值, 可由下式進(jìn)行計(jì)算:

其中: I i,j是圖像傳感器在無光照條件下輸出的暗圖像灰度值矩陣, M 、N 是圖像傳感器像素陣列的行數(shù)和列數(shù)。
2) 暗不一致性
理想情況下, 在無光照的時(shí)候圖像傳感器的輸出也應(yīng)該是均勻的。但是圖像傳感器的像素間總是存在差異的, 因此暗輸出總有波動。波動的大小表明圖像傳感器像素性能的穩(wěn)定性, 計(jì)算方法是求出暗圖像各像素輸出灰度值的標(biāo)準(zhǔn)差

其中各符號的含義與暗噪聲計(jì)算式(5) 相同。
2. 3 實(shí)驗(yàn)結(jié)果及分析
按照2. 1 所述的方案進(jìn)行實(shí)驗(yàn), 得到了CMOS相機(jī)在60~- 5 ℃溫度區(qū)間內(nèi)平均暗輸出以及暗不一致性隨溫度的變化曲線, 分別如圖5、圖6 所示。
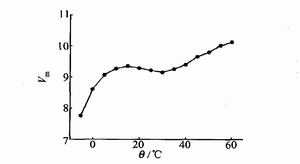
圖5 平均暗輸出隨溫度的變化曲線
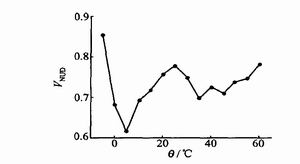
圖6 暗不一致性隨溫度的變化曲線
從圖中可以看出, 平均暗輸出隨著溫度的升高大致呈上升趨勢。當(dāng)溫度小于10 ℃時(shí), 平均暗輸出上升速度較快;10~ 15 ℃上升趨緩;從15 ℃開始略有下降,到30 ℃時(shí)達(dá)到低谷,10~30℃之間,總的來說平均暗輸出值變化比較平穩(wěn); 30 ℃以上, 平均暗輸出值又以較快的速度上升。本文選用的CMOS圖像傳感器為256 級灰度輸出, 實(shí)驗(yàn)中平均暗輸出的變化范圍為7.7567~10.1092。
平均暗輸出之所以隨著溫度的升高大致呈上升趨勢, 是因?yàn)闇囟壬撸?CMOS圖像傳感器及其外圍電子器件的熱噪聲都會升高; 而平均暗輸出在10~30 ℃之間變化比較平穩(wěn), 甚至在15~30 ℃之間略有下降, 是因?yàn)镃MOS圖像傳感器在設(shè)計(jì)上的特殊考慮保證了其在常溫下具有最優(yōu)的工作性能;這同時(shí)也說明了這套遙感系統(tǒng)的電噪聲主要來源于CMOS圖像傳感器。
暗不一致性隨溫度的變化不大, 實(shí)驗(yàn)中其變化范圍為0.6148~0.8542,比平均暗輸出低一個數(shù)量級, 可以忽略。
實(shí)驗(yàn)中還測試了CMOS相機(jī)的耐低溫性能。關(guān)機(jī)后將相機(jī)降溫至- 25 ℃,達(dá)到溫度平衡后再升溫至0 ℃,開機(jī)采集圖像, 分析其性能變化。實(shí)驗(yàn)測得經(jīng)受低溫后, CMOS相機(jī)在0℃下的平均暗輸出為7.2323, 比先前略有降低; 暗不一致性為0.8781,比先前略有增大。由于實(shí)驗(yàn)中暗不一致性始終比平均暗輸出低一個數(shù)量級, 其變化相對平均暗輸出可以忽略, 所以這個結(jié)果說明關(guān)機(jī)狀態(tài)下低溫環(huán)境不會對CMOS相機(jī)的成像質(zhì)量產(chǎn)生顯著的不良影響。綜上所述, 本文設(shè)計(jì)的這套CMOS遙感相機(jī)在10~30℃之間平均暗輸出變化平穩(wěn), 暗不一致性可以忽略,有利于對成像質(zhì)量的控制和校正,是理想的成像溫度范圍。
3 結(jié)論與展望
本文設(shè)計(jì)了一套納型衛(wèi)星CMOS遙感系統(tǒng), 體積為62mm×62mm×35mm,功耗小于0.6W, 質(zhì)量小于150g,采用10μm像素尺寸、1024×1024像素?cái)?shù)目的CMOS圖像傳感器, 光譜響應(yīng)范圍為400~800nm,配合焦距為50mm的鏡頭,在800km的太陽同步軌道上,可以實(shí)現(xiàn)大于150km×150km的地面覆蓋面積和優(yōu)于 160m 的地面分辨率,適于納型衛(wèi)星獲取多光譜和彩色的普查信息。熱循環(huán)實(shí)驗(yàn)表明, 該CMOS遙感相機(jī)能夠耐受空間環(huán)境中- 25~60 ℃的衛(wèi)星艙內(nèi)溫度變化, 在10~30 ℃的溫度范圍內(nèi)工作穩(wěn)定,可通過地面測試數(shù)據(jù)對其在空間獲取的圖像進(jìn)行校正補(bǔ)償。
由于國際上對CMOS圖像傳感器在航天領(lǐng)域的應(yīng)用研究較少, 所以設(shè)計(jì)出來的CMOS相機(jī)在上天之前, 還需要研究其熱真空性能和抗輻照性能, 提出相應(yīng)的補(bǔ)償、加固措施。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論