 電子發燒友App
電子發燒友App


Atmel公司的控制器以其集成度高、在線調試方便等特點廣泛應用于工程實踐領域,文中以某武器系統的前期預研為背景,討論了數字儀表系統的軟硬件實現過程,其主要功能包含:實時采集配電箱系統的6路正負模擬電壓值及作戰環境溫度,并通過MSl2232B型液晶模塊動態式顯示。
1 軟件特性
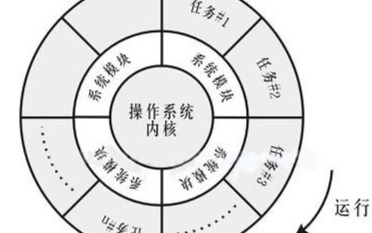
隨著C語言在嵌入式系統中的廣泛運用,軟件系統的實時性、復雜性設計要求也越來越高,用通常的單任務無限循環結構與中斷服務子程序相配合的編程思想已難以完成相關的軟件設計或實現較為困難,RTOS(多任務實時操作系統)是現階段較為流行的處理方式。
RTOS的基本設計思想是將多種系統輸入和處理要求,按功能做成不同的任務函數體,并分配適當的優先級,參考Windows系統的多線程處理機制,將CPU執行時間劃分成若干區段,每個任務函數體對應一個時間片段.在規定的時間內執行完后允許切換到另一個任務,因各時間段非常短,表現的是多任務實時處理特性。因為任務并非同時執行且具備跳轉特性,所以整個項目管理文件內可以有多個無限循環結構,且省略了main入口函數,這是RTOS最大的特色。文中以Keil集成開發環境為平臺,利用RTX5l Tiny版本來完成整個軟件設計過程。
ISP(在系統可編程)是一種適合Atmel系列器件的Flash技術,通過PC的LPT標準并行接口,能實時地將Intel格式的源程序代碼下載到微控制器的相應存儲區域。ISP的最大特點是簡化了調試過程,提高了軟件系統的可維護性,使其具備了在線升級特性。而且整個開發過程省去了反復插拔電路的操作。
2 系統硬件構成
本系統硬件主要包括如下幾個模塊:AT89S52型主控制器、ADC0809型模/數轉換、MSl2232B型液晶顯示器、溫度傳感器及語音報警等。其中AT89S52型微處理器主要完成外圍器件的硬件控制及相關數據解算,ADC0809采集6路模擬信號并輸入主控制器,MSl2232B完成數字及相關標識字符的顯示,配電系統的電壓波動超出預定指標時由語音模塊給出相應的報警信息。
2.1 主控制器模塊
主控制器是Atmel公司生產的AT89S52型單片微控制器,與常規C51系列相比,其突出特點是具有8KB閃速式存儲器(降低了對外擴存儲器的要求)、256B RAM內存(可容納更多局部變量)、8個中斷源及ISP在線可編程特性。
2.2 液晶顯示模塊
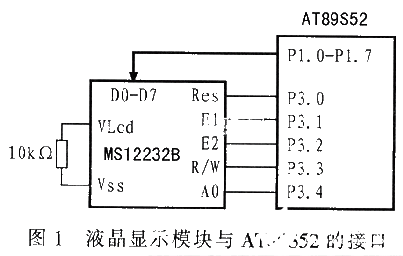
MSl2232B屬于圖形點陣系列的顯示器件,具有雙行顯示功能,其點陣結構為122×32,通過AT89s52給出必要的數據和指令來操作MSl2232B主、輔控制器,從而完成圖形、字符等相關信息的顯示。該液晶顯示模塊還具有較強的通用性.用戶用少量元件就可以構成一個完整的LCD系統。電路連接如圖1所示。
2.3 A/D數據采集模塊
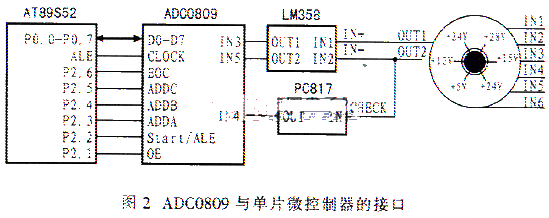
由于本系統涉及多路模擬信號,故選擇了AD(20809型通用模/數轉換器,它采用逐次逼近方式完成A/D轉換過程,其片內帶有8路模擬開關,能自動鎖存信號,輸入電壓范圍是0V~+5V,因為該器件的輸出具有1TrL三態鎖存緩沖器結構,所以可以直接連人單片微控制器的I/O口。相關的接口連接如圖2所示。
需要說明的是,在本系統6路電源信號中只有一路負電源信號符合ADC0809 0V~5v的輸入特性,因此必須配備相應的反相電路,則通過LM358型運算放大器來完成。利用LM358還可以擴展監測范圍(以降低測量精度為前提),這對于精度要求不太高的場合是可行的。圖2中PC817型光耦用于檢測負電壓信號,當IN4為低電平信號時對應負電壓信號,此時在MSl2232B的相應行位置給出“-”號標志,這不僅解決了正負電壓同行顯示的兼容性問題,而且減少了軟件設計量(由6路簡化為3路),同時使系統實時性相應提升。
2.4 溫度傳感器模塊
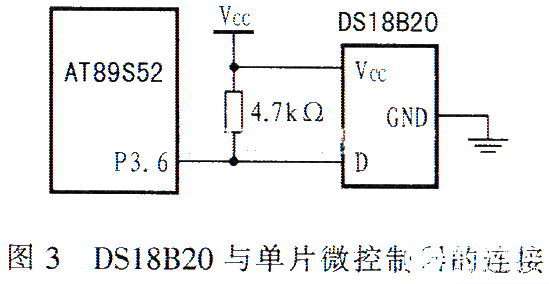
DS18820是Dallas公司推出的l—Wire式數字溫度傳感器,它能實時采集現場環境的溫度數據,并將相應的值轉換為數字量輸出。該溫度傳感器與AT89S52的連接如圖3所示。
2.5 語音報警模塊
該模塊主要實現異常情況下告警信息的輸出,只要配電箱電壓信號的波動值超出一定的范圍,音頻告警裝置即給出不同的頻率信號使蜂鳴器發聲,以提示相關操作人員注意。
3 系統軟件設計
按RTOS系統的程序結構要求,軟件工程主要由如下4部分組成:初始化、數據采集與A/D轉換、顯示子程序、溫度監測與告警模塊。
如果將初始化設置為任務0,那么除了要完成相應的硬件配置與變量賦初值外,還必須啟動所有其他任務,另外,因為初始化過程只須進行一次,所以Task 0還應當刪除其自身。具體的程序代碼如下所示:
void Init(void)_task_Intia l
{
variable=0;
LcdInitialO;
ClrScreenO;
0s_create_task(AI)C0809I)ata);
os_create_task(DS18820Temperate);
0s_create_task(LCMI)ISPlay);
0s_delete_task(Intial);
}
其中相關的宏定義變量值為:
#define Intial O
#define ADC0809Data 1
#define DSl 8820Temperate 2
#define LCMDisplay 3
在Keil集成開發環境下調試本程序時,除了要包括相應的頭文件(rtx51tny.h)外,還必須設置好相應的環境參數值。
3.1 數模轉換子程序
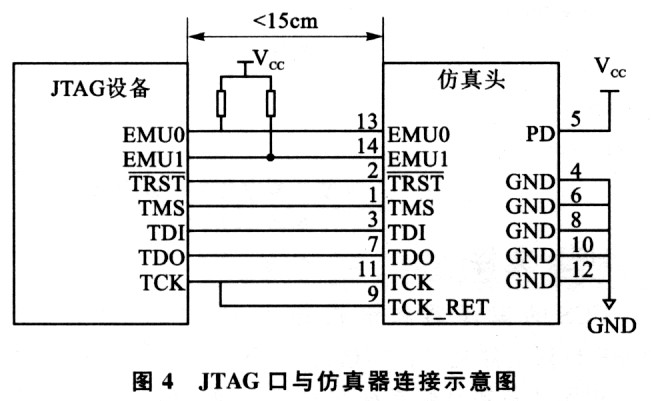
數據采集與A/D轉換子程序主要對配電箱傳來的模擬信號進行采樣、量化及返回值處理。軟件編程時的電氣時序及相關技術要求如圖4所示。
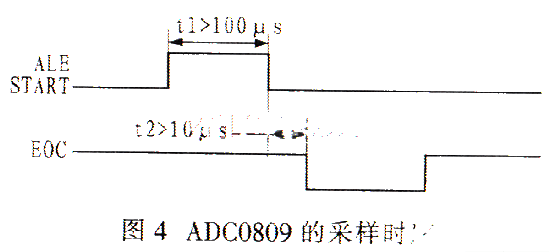
在時序圖中,上升沿清空量化結果寄存器內的值,下降沿啟動,A/D轉換;采樣啟動脈沖的高電平狀態至少應維持100μs;EOC變為低電平表示轉換過程正在進行,且啟動信號的硬件遲滯效應時間至少應為10μs;MSB對應AT89S52并口的:P0.7,LSB對應P0.0。
關鍵部分的程序源代碼及注釋如下:
unsigned int AI)C0809(void)
{
unsigned int wait=“3”;
ChannelChooseA=1;
ChannelChooseB=0;
ChannelChooseC=0;
ADStartPulse=0;
ADStartPulse=1;//產生A/D轉換的啟動脈沖
(上升沿部分)
delay();//保證啟動脈沖的高電平寬度
至少大于100μs
ADStartPulse=0;//產生A/D轉換的啟動脈沖
(下降沿部分)
wait--;
wait--; //指令延時以保證達到:EOC
變為低電平所需的硬件遲滯要求。
‘whilefADConvertEOC==0):
return(Result);/將A/[)轉換后的量化值返
回到主函數中。
}
3.2 液晶顯示模塊
MSl2232B型圖形點陣液晶顯示(LCM)模塊左右分為Master和Slave控制器,上下共分4頁,左邊列地址為0-61,右邊列地址為0-61,對該器件的操作關鍵是按時序圖正確配置好主、輔控制器的工作狀態。利用AT89S52訪問LCM時有二種常用的方法,即存儲器映射寄存器尋址和模擬接口時序,本系統采用后一種方法。主要函數模塊源代碼分析:
void MasterWriteD(unsigned char Ramdata)
//向Master控制器寫數據
{
ReadOrWrite=0;
InstructionOrData=1;
MasterEl=1;
P0=Ramdata;
MasterEl:0;
}
void MasterWriteI(unsigned char Ramdata)
//向Master控制器寫指令
{
ReadOrWrite=0;
InstructionOrData=0;
MasterEl=1;
P0=Ramdata;
MasterE1=O;
}
void ReadState(void) //檢測主、輔控制器工作狀態
{
ReadOrWrite=1;
InstructionOrData=0;
MasterEl=1:
SlaveE2=1;
PO=0xff;
while(BusStateBusy==1);
}
void SetPage(unsigned char page0,unsigned char pagel)
{
MasterWriteI(0xb8 | pagel);
SlaveWriteI(0xb8 | page0);
}
void SetColumn(unsigned char address0,unsigned char addressl)
{
MasterWriteI(0x3f & addressl);
SlaveWfiteI(0x3f & address0);
}
//在主控制器操作的左邊LCM屏上顯示一列信息(由8個像素點構成)
void MasterPutChar(unsigned char masterchar)
{
ReadState();
MasterWriteD(masterchar);
}
一般說來。AT89S52的RAM存儲空間是有限的,而圖形或字符的點陣代碼(可以下載相關的應用插件,由.bmp文件或字符自動生成)如果太大,放置到RAM區會出現內存不足的告警提示,為此可按如下方式處理:
unsigned char code Dotn[]=lOxOO,Ox00,0x30,
0x00,0x30,Ox00,Ox00,0x00};
即將點陣代碼通過code關鍵字限定后放于ROM區域內。
3.3 DS18820的1-Wire子程序
DS18820的突出優點是將現場采集的環境溫度直接以數字形式輸出,這樣可以省去后續的信號放大及模/數轉換部分,構建外圍電路的元件少且相對簡單,系統成本低廉;1-Wire接口與AT89S52通信,其結構便于多點測量且易于擴展;測溫范圍寬(-550℃~1250℃)且精度高。
對l-Wire的操作關鍵是軟件時序的處理,對于不同的晶體振蕩器其延時參數是不同的,本系統以12MHz為例給出如下主要程序代碼:
bit DallassReset(void)
{
unsigned char presence=“0”;
DallassDataout=1; //發出復位脈沖前先釋
放總線
delay(10);
DallassDataout=0;
delay(240);//保證延時在4801μs~9601μs之間
DaUassDataout=1;
delay(35);
Dresence=DallassDataout;
delay(60);
return(presence);
}
//寫時序從主控制器把總線拉低時開始
void writeCommand(unsigned char command)
{
unsigned char count;
for(count=O;count<8;count++)
{
DallassDataout=0;
if(command&0x01==1)
{
DallassDataout=1;
//寫“1”時序在將總線拉低后,AT89S52主控制器必須在15μs內釋放總線,所以此語句之前不能有較長時間的延時語句
}
delay(35);//無論寫“1”還是寫“0”時序都必須有至少601as的低電平 DallassDataout=“1”;//總線恢復的過程
command=command>>1;
}
}
//讀時序從主控制器將總線拉低至少1μs后釋放總線的時刻開始
unsigned char readdata(void)
{
unsigned char value;
unsigned char midtemp=“0”;
for(value=0;value<8;Value++)
{
I DallassDataout=“0”;
midtemp=midtemp>>1;
-nop_O;
_nop_O;
DallassDataout=1;
//讀時序時,控制器必須在15μs內釋放總線,然后采樣總線狀態,所以此語句之前不能延時太長的時間的延時語句
if(DallassDataout==1)
{
midtemp=midtemp | 0x80;
//因為midtemp初始被賦值為0,所以如果采樣總線狀態為0則不必處理,0會自動被返回
}
delay(35);
//延時70μs完成此次Bit
位讀時序過程,為下一次讀作準備
}
return(midtemp);
}
void delay(unsigned char out)
{
unsigned char in;
for(in=out;in>O;in--);
}
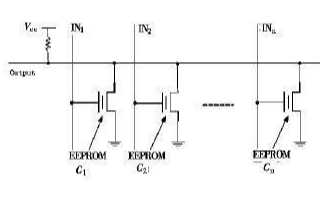
4 ISP的結構原理
將ISP功能集成到成型的PCB上就可以實現程序的實時更新與升級操作,其結構原理如圖5所示,這對于復雜工程系統設計顯然是很方便的,也是切實可行的。
5 結論
隨著智能儀器儀表技術的發展,顯示模塊的液晶化已成為一種較為流行的趨勢。本文給出的軟硬件設計方案已在某武器系統的調試過程中得到正確、可靠、穩定的運行。它不僅克NT模似儀表體積大、故障率高的缺陷,而且由于運用了RTOS技術,使數據檢測的敏捷度得到大幅提升。另外,ISP功能的在線集成也為系統功能的擴充預留了空間。
責任編輯:gt









 工商網監
工商網監
評論