 電子發(fā)燒友App
電子發(fā)燒友App


摘要:無人機(jī)作戰(zhàn)樣式因其特有的“快、精、廉”等特點(diǎn)被廣泛用于現(xiàn)代戰(zhàn)場,并取得了非凡的實(shí)戰(zhàn)效果。總結(jié)現(xiàn)代戰(zhàn)場無人機(jī)作戰(zhàn)特點(diǎn),結(jié)合世界先進(jìn)的反無人機(jī)技術(shù),分析目前無人機(jī)作戰(zhàn)樣式存在的不足,并以此為出發(fā)點(diǎn),以滿足未來戰(zhàn)爭需求,應(yīng)對(duì)防空反無人機(jī)技術(shù)體制為目的,探索軍用作戰(zhàn)無人機(jī)未來發(fā)展方向,以期為軍用無人機(jī)及其作戰(zhàn)樣式的研究提供參考。
無人機(jī)自20世紀(jì)60年代越南戰(zhàn)爭時(shí)期,首次被派到戰(zhàn)場執(zhí)行偵察任務(wù),正式進(jìn)入軍事作戰(zhàn)領(lǐng)域,其作為一種新型作戰(zhàn)樣式,開啟了無人化作戰(zhàn)先河,幾十年來,無人機(jī)以偵察、預(yù)警、電子干擾、空地打擊等“多面手”的角色出現(xiàn)在海灣、科索沃、阿富汗、伊拉克、土敘、納卡等局部戰(zhàn)爭或沖突中,并取得驚人效果,尤其在納卡沖突中,無人機(jī)首次作為主戰(zhàn)裝備參與作戰(zhàn),更是第一次將無人機(jī)協(xié)同作戰(zhàn)從概念轉(zhuǎn)化為實(shí)戰(zhàn),并取得卓越的戰(zhàn)績,充分證明了無人機(jī)作戰(zhàn)的軍事價(jià)值。可以預(yù)見,隨著世界新軍事革命的不斷推進(jìn),無人機(jī)作戰(zhàn)必將成為無人化作戰(zhàn)的重要組成部分。
無人機(jī)作戰(zhàn)能力雖已多次經(jīng)過現(xiàn)代戰(zhàn)爭檢驗(yàn),但縱觀現(xiàn)代戰(zhàn)爭中的無人機(jī)實(shí)戰(zhàn)案例,可以發(fā)現(xiàn)其存在一些共性缺陷,如弱/無自主,不注重隱身,嚴(yán)重依賴無線電通信技術(shù)及衛(wèi)星導(dǎo)航技術(shù),而現(xiàn)代反無人機(jī)技術(shù)正是利用這些缺陷作為切入點(diǎn),成為無人機(jī)在戰(zhàn)場上的克星。隨著戰(zhàn)場環(huán)境的日益復(fù)雜化,防空反無人機(jī)技術(shù)高速深入發(fā)展以及戰(zhàn)爭由信息化向智能化的轉(zhuǎn)變,軍用作戰(zhàn)無人機(jī)必須針對(duì)性地做出改進(jìn),才能適應(yīng)未來高烈度、高技術(shù)、高電磁復(fù)雜度、威脅目標(biāo)多樣的戰(zhàn)場環(huán)境。
本文以彌補(bǔ)無人機(jī)作戰(zhàn)樣式不足為出發(fā)點(diǎn),以適應(yīng)復(fù)雜的未來戰(zhàn)場環(huán)境,應(yīng)對(duì)防空反無人機(jī)技術(shù)體制為目的,結(jié)合現(xiàn)代及未來可預(yù)見的技術(shù),對(duì)軍用作戰(zhàn)無人機(jī)未來發(fā)展方向與特征進(jìn)行探索與思考。
1 軍用無人機(jī)實(shí)戰(zhàn)案例分析
自無人機(jī)躋身軍事作戰(zhàn)領(lǐng)域后,其實(shí)戰(zhàn)案例舉不勝舉,但極具代表性、較經(jīng)典的當(dāng)屬納卡沖突及蘇萊曼尼刺殺行動(dòng)中的無人機(jī)作戰(zhàn)應(yīng)用。
1)納卡沖突
納卡沖突中參與的無人機(jī)數(shù)量多,種類全,初步體現(xiàn)了協(xié)同、聯(lián)合的體系化作戰(zhàn)樣式,無人機(jī)首次作為主戰(zhàn)裝備并對(duì)戰(zhàn)局起決定性作用。據(jù)阿方國防部戰(zhàn)報(bào)數(shù)據(jù),在沖突首個(gè)星期,阿方就已摧毀了亞方230輛坦克和裝甲車、250門火炮和導(dǎo)彈系統(tǒng)、38套防空系統(tǒng)、10個(gè)指揮中心、7個(gè)彈藥庫、130輛軍用車輛、1個(gè)S-300防空系統(tǒng)。TB-2無人機(jī)回傳的作戰(zhàn)打擊圖如圖1所示。
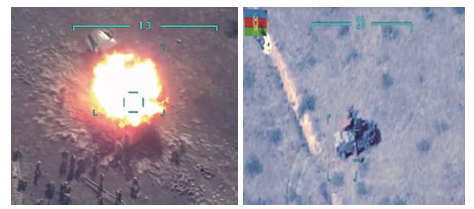
圖1 TB-2無人機(jī)打擊地面部隊(duì)和“薩姆-8A”防空系統(tǒng)
2020年9月,阿塞拜疆與亞美尼亞爆發(fā)軍事沖突,阿方一改往日地面部隊(duì)長驅(qū)直入的戰(zhàn)術(shù),綜合運(yùn)用“赫爾墨斯”450型無人機(jī)、“蒼鷺”無人機(jī)、“哈洛普”無人機(jī)、安-2無人機(jī)、TB-2無人機(jī)協(xié)同作戰(zhàn)。阿方首先前出“赫爾墨斯”450和“蒼鷺”無人機(jī)縱深偵察亞方防空裝備布置情況,隨后出動(dòng)安-2無人機(jī)誘使其防空系統(tǒng)工作,最大程度地暴露并消耗其防空力量,然后利用多架配備反輻射導(dǎo)引頭的“哈洛普”無人機(jī)攜帶炸彈,攻破亞方暴露的防空系統(tǒng),在亞方大量的防空力量被摧毀后,阿方派出多架攜帶MAM-C和MAM-L激光半主動(dòng)制導(dǎo)導(dǎo)彈的TB-2無人機(jī)縱深攻擊亞方境內(nèi)軍火庫、指揮所、軍事基地,同時(shí)攻擊其主戰(zhàn)坦克、裝甲車、火炮等地面裝備,掌控了戰(zhàn)場的制空權(quán)和主動(dòng)權(quán)。作戰(zhàn)流程圖如圖2所示。
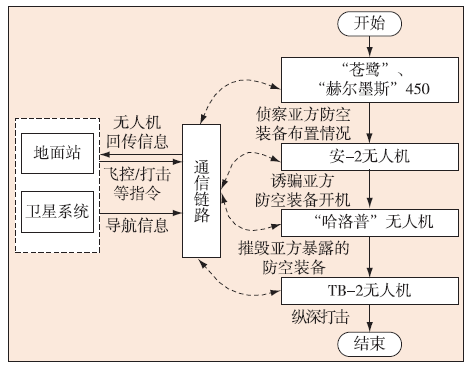
圖2 阿方無人機(jī)作戰(zhàn)流程圖
2)蘇萊曼尼刺殺行動(dòng)
蘇萊曼尼刺殺行動(dòng)在短時(shí)間內(nèi)完成發(fā)現(xiàn)、確認(rèn)、發(fā)射和摧毀等一系列動(dòng)作,當(dāng)場擊殺了有著“中東諜王”之稱的蘇萊曼尼,展現(xiàn)了極高的戰(zhàn)術(shù)水準(zhǔn),同時(shí)也體現(xiàn)了世界先進(jìn)的察打一體無人機(jī)的極限作戰(zhàn)能力,從無人機(jī)作戰(zhàn)運(yùn)用層面來看,蘇萊曼尼刺殺行動(dòng)無疑是無人機(jī)單機(jī)執(zhí)行任務(wù)的經(jīng)典之作。蘇萊曼尼刺殺現(xiàn)場如圖3所示。
2020年1月3日,伊朗“圣城旅”指揮官卡西姆·蘇萊曼尼在巴格達(dá)國際機(jī)場乘車準(zhǔn)備返回官邸時(shí),美軍從卡塔爾出動(dòng)一架MQ-9“死神”察打一體無人機(jī)對(duì)其進(jìn)行刺殺,整個(gè)刺殺過程分為三個(gè)階段。1)巡航鎖定。由于美軍已事先掌握了蘇萊曼尼的行蹤,MQ-9“死神”無人機(jī)早已從卡塔爾飛至巴格達(dá)上空巡航待命,他一下飛機(jī)就已經(jīng)被在9 000 m高的“死神”牢牢鎖定了。2)捕獲跟蹤。MQ-9“死神”利用先進(jìn)的多光譜瞄準(zhǔn)系統(tǒng)獲取地面人員高清視頻和圖像,通過圖像匹配識(shí)別,確定捕獲目標(biāo)。3)擊殺。待蘇萊曼尼車隊(duì)行駛至預(yù)設(shè)刺殺區(qū)域時(shí),遠(yuǎn)在白宮的戰(zhàn)情辦公室下達(dá)攻擊命令,多枚“地獄火”從天而降并精準(zhǔn)命中目標(biāo),完成刺殺任務(wù)。作戰(zhàn)流程圖如圖4所示。
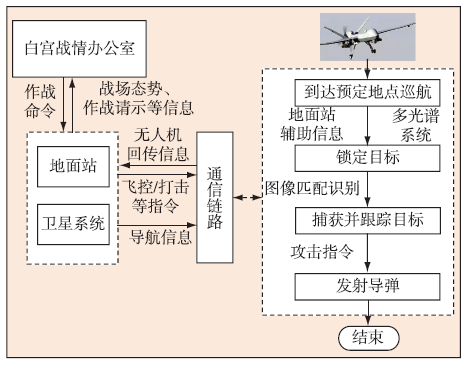
圖4 MQ-9死神無人機(jī)作戰(zhàn)流程圖
從上述實(shí)戰(zhàn)案例中,我們可以發(fā)現(xiàn)現(xiàn)代戰(zhàn)爭中無人機(jī)作戰(zhàn)樣式有如下共同特點(diǎn):
1)人在回路中。受限于智能自主技術(shù)水平,現(xiàn)代無人機(jī)作戰(zhàn)樣式絕大多數(shù)都采用人在回路中的弱/無自主模式,即由人控制無人機(jī)完成OODA各環(huán)節(jié)。
2)不注重隱身。因無人機(jī)參與的現(xiàn)代戰(zhàn)爭大部分為低烈度、非對(duì)稱戰(zhàn)爭,對(duì)方防空能力較弱,探測預(yù)警手段單一,所以參戰(zhàn)的無人機(jī)極少做隱身處理。
3)高度依賴通信鏈路。通信鏈路是無人機(jī)的生命鏈和作戰(zhàn)效能發(fā)揮的保障鏈,受自主能力、作戰(zhàn)模式所限,現(xiàn)代無人機(jī)執(zhí)行任務(wù)時(shí),高度依賴無線電通信鏈路與地面站進(jìn)行信息交互,從而實(shí)現(xiàn)諸如圖像回傳、指令下發(fā)等功能。
4)高度依賴衛(wèi)星導(dǎo)航。無人機(jī)的定位導(dǎo)航技術(shù)有很多種,如視覺導(dǎo)航、慣性導(dǎo)航、衛(wèi)星導(dǎo)航、多普勒導(dǎo)航,但受精度、體積、計(jì)算量等因素的約束,目前,世界上絕大多數(shù)高性能作戰(zhàn)無人機(jī)基本上使用了衛(wèi)星導(dǎo)航+其他導(dǎo)航的組合導(dǎo)航方式。
2 反無人機(jī)技術(shù)分析
事實(shí)上,隨著無人機(jī)越來越多地直接介入現(xiàn)代戰(zhàn)爭并逐漸成為決定勝負(fù)的關(guān)鍵因素,世界各軍事強(qiáng)國紛紛開始針對(duì)性地發(fā)展反無人機(jī)技術(shù),無人機(jī)作戰(zhàn)和反無人機(jī)作戰(zhàn)構(gòu)成矛盾體,攻防雙方的技術(shù)能力此消彼長呈波浪式前進(jìn)趨勢,因此,從反無人機(jī)作戰(zhàn)技術(shù)特點(diǎn)可以直接有效地窺見現(xiàn)代無人機(jī)作戰(zhàn)樣式的缺陷和不足。綜合目前世界上典型的先進(jìn)反無人機(jī)系統(tǒng)及技術(shù),如美國的輕型防空綜合系統(tǒng)(LMADIS)、移動(dòng)式低慢無人機(jī)綜合防御系統(tǒng)(MLIDS)、陸基防空定向能系統(tǒng)(GBAD),俄羅斯的“薔薇”電子戰(zhàn)系統(tǒng)、“克拉蘇哈-4”電子戰(zhàn)系統(tǒng)、“鎧甲”系統(tǒng),可將作戰(zhàn)流程分為預(yù)警、識(shí)別、打擊三部分,反無人機(jī)作戰(zhàn)流程如圖5所示。
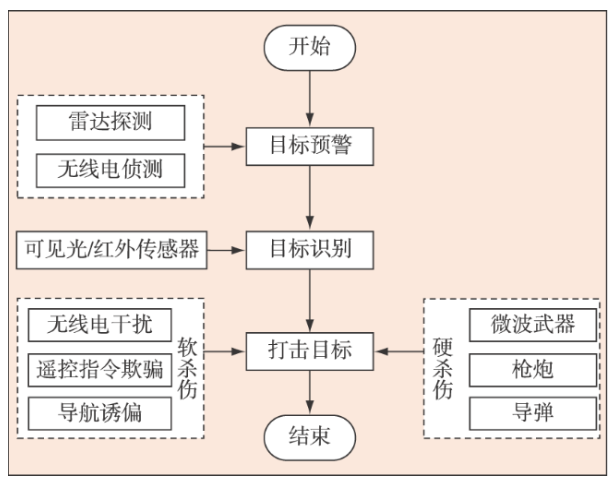
圖5 反無人機(jī)作戰(zhàn)流程
從圖5可以看出,反無人機(jī)技術(shù)是對(duì)標(biāo)無人機(jī)作戰(zhàn)樣式特點(diǎn)進(jìn)行探測、反制手段的適配,如利用無人機(jī)作戰(zhàn)樣式的不注重隱身,高度依賴通信鏈路的特點(diǎn),分別采用雷達(dá)、無線電偵測及紅外傳感器對(duì)其進(jìn)行預(yù)警探測,利用無人機(jī)作戰(zhàn)樣式的人在回路中,高度依賴通信鏈路,高度依賴衛(wèi)星導(dǎo)航的特點(diǎn),分別采用遙控指令欺騙、無線電干擾與導(dǎo)航誘偏對(duì)其進(jìn)行軟殺傷。具體的反無人機(jī)技術(shù)手段與無人機(jī)作戰(zhàn)樣式特點(diǎn)適配關(guān)系如圖6所示。
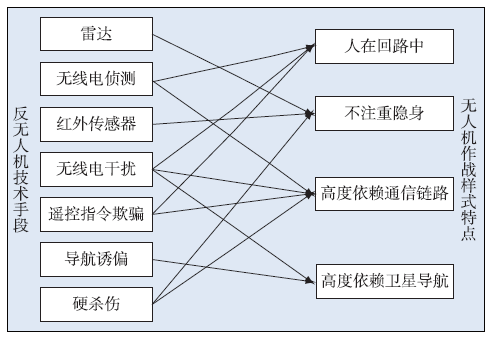
圖6 適配關(guān)系
依據(jù)目前及可預(yù)見未來的技術(shù)能力來看,無人機(jī)無法具備針對(duì)可見光識(shí)別的有效隱身能力,本文不做討論;對(duì)于硬殺傷而言,由于其需要探測識(shí)別系統(tǒng)提供的精準(zhǔn)目指信息,本文認(rèn)為其應(yīng)適配于無人機(jī)作戰(zhàn)樣式的不注重隱身及高度依賴通信鏈路的特點(diǎn)。
綜上分析,反無人機(jī)技術(shù)作為無人機(jī)作戰(zhàn)強(qiáng)勁的對(duì)手,其發(fā)展的核心技術(shù)及指導(dǎo)思想就是以無人機(jī)作戰(zhàn)樣式特點(diǎn)為切入點(diǎn),正如納卡沖突后期,阿方所向披靡的TB-2無人機(jī)遭遇俄“克拉蘇哈-4”電子反無人機(jī)作戰(zhàn)系統(tǒng),“克拉蘇哈-4”對(duì)其實(shí)施通信鏈路及導(dǎo)航信息干擾,成功擊落9架TB-2無人機(jī)。再如2018年,伊朗的反無人機(jī)系統(tǒng)利用導(dǎo)航誘偏方式,將MQ-9“死神”無人機(jī)誘偏到地面“沒收”,此前,伊朗用同樣的方法捕獲了美國MQ-1“捕食者”無人機(jī)及RQ-170“哨兵”無人機(jī),因此,上文中無人機(jī)作戰(zhàn)樣式的共同特點(diǎn)亦為其“軟肋”。
3 軍用作戰(zhàn)無人機(jī)未來發(fā)展重點(diǎn)
從美國的“第三次抵消戰(zhàn)略”突出發(fā)展的能力可以看出,未來戰(zhàn)爭將呈現(xiàn)三個(gè)發(fā)展方向。
1)戰(zhàn)場物理空間呈分布式一體化發(fā)展,具有作戰(zhàn)單元多,作戰(zhàn)環(huán)境復(fù)雜,多域聯(lián)合立體化等特點(diǎn),將迫使參戰(zhàn)方耗費(fèi)大量ISR資源及時(shí)間進(jìn)行感知與規(guī)劃;
2)作戰(zhàn)時(shí)間進(jìn)程向快速化發(fā)展,具有高烈度、高實(shí)時(shí)等特點(diǎn),以賽博空間為代表的網(wǎng)絡(luò)信息電子電磁一體化作戰(zhàn),要求參戰(zhàn)方具有高OODA循環(huán)速度,具備強(qiáng)抗干擾能力;
3)作戰(zhàn)技術(shù)應(yīng)用趨于智能化發(fā)展,具有感知智能化、判斷智能化、決策智能化、打擊智能化等特點(diǎn),要求參戰(zhàn)方必須從作戰(zhàn)體系到裝備、作戰(zhàn)策略到行動(dòng)等每個(gè)環(huán)節(jié)都盡可能地智能化,以滿足未來戰(zhàn)爭的戰(zhàn)略平衡的需要。
隨著大數(shù)據(jù)、云計(jì)算、人工智能等技術(shù)的發(fā)展以及世界各國對(duì)制空權(quán)的日益重視,未來防空反無人機(jī)體系必定會(huì)推陳出新,必然向構(gòu)建多手段、多層次、立體化聯(lián)合智能自主防御體系方向發(fā)展,通過提高多源探測能力,提高多手段復(fù)合攔截能力及建立高效智能指揮體系,實(shí)現(xiàn)信息全源化,探測全域化,決策智能化,打擊全向化的能力,極大地縮短OODA環(huán)路周期,從而降低無人機(jī)破防概率。
因此,軍用作戰(zhàn)無人機(jī)為順應(yīng)新軍事革命發(fā)展及未來戰(zhàn)場作戰(zhàn)需求,必然要進(jìn)行適應(yīng)性發(fā)展與優(yōu)化,然而,在面對(duì)未來環(huán)境高復(fù)雜,博弈強(qiáng)對(duì)抗,響應(yīng)高實(shí)時(shí),邊界不確定的智能化戰(zhàn)爭,依靠傳統(tǒng)技術(shù)難以對(duì)現(xiàn)有問題做出改善,必須結(jié)合人工智能、數(shù)據(jù)融合、創(chuàng)新材料等高新技術(shù)。
歐洲宇航防務(wù)集團(tuán)曾提出,“如果出現(xiàn)一種武器可以在前期偵察探測,中期跟蹤尋的,最后摧毀目標(biāo),整個(gè)過程完全實(shí)現(xiàn)自主化,那便可以在與指揮端失聯(lián)的情況下繼續(xù)自主完成攻擊,大大提高作戰(zhàn)能力”。根據(jù)微處理器摩爾定律可知,未來無人機(jī)將具備超越人腦水平的數(shù)據(jù)存儲(chǔ)與處理能力,屆時(shí)能更好地結(jié)合人工智能算法。可以預(yù)見,未來將通過人工智能技術(shù)賦能無人機(jī)作戰(zhàn)OODA各環(huán)節(jié),驅(qū)動(dòng)各環(huán)節(jié)高效運(yùn)行。未來無人機(jī)將奉行“以快吃慢”的法則,在高烈度、高實(shí)時(shí)的戰(zhàn)場占據(jù)主動(dòng)權(quán),擺脫通信鏈路控制,解決人在環(huán)路中模式存在的抗干擾誘騙能力差,識(shí)別不準(zhǔn)等問題;結(jié)合人工智能、數(shù)據(jù)融合等技術(shù)使無人機(jī)具備自主目標(biāo)識(shí)別、自主規(guī)劃路徑、自主避障等能力,實(shí)現(xiàn)衛(wèi)星拒止環(huán)境下的無人機(jī)的精確自主導(dǎo)航飛行,從而適應(yīng)高動(dòng)態(tài)、高復(fù)雜度、不透明的任務(wù)環(huán)境;結(jié)合材料、結(jié)構(gòu)等技術(shù)研究發(fā)展高性能隱身無人機(jī),實(shí)現(xiàn)對(duì)雷達(dá)、紅外等主被動(dòng)探測手段的隱身功能,同時(shí)兼顧氣動(dòng)、結(jié)構(gòu)等方面性能的最優(yōu)化,使其具備高水平戰(zhàn)技指標(biāo),遂行完成高難度任務(wù)。
3.1
高性能隱身
無人機(jī)的隱身性對(duì)提高其戰(zhàn)場生存能力至關(guān)重要。現(xiàn)代無人機(jī)隱身技術(shù)都是以特定探測器為對(duì)象的單項(xiàng)隱身技術(shù)的物理疊加,經(jīng)常將雷達(dá)隱身設(shè)計(jì)和紅外隱身設(shè)計(jì)分開進(jìn)行。雷達(dá)隱身設(shè)計(jì)的主要目的是減少雷達(dá)散射面積,主要技術(shù)包括外形隱身技術(shù)及材料隱身技術(shù),外形隱身技術(shù)通過合適的外形設(shè)計(jì),整體上降低雷達(dá)回波幅度或?qū)⒗走_(dá)回波主要能量集中在重點(diǎn)方向,材料隱身技術(shù)通過使用雷達(dá)吸波材料,可將入射的電磁波吸收或散射衰減掉,從而減少雷達(dá)散射面積;紅外隱身設(shè)計(jì)的主要目的是降低無人機(jī)紅外輻射特性,主要技術(shù)包括降低機(jī)體表面溫度及紅外發(fā)射率,通常采用渦輪風(fēng)扇發(fā)動(dòng)機(jī)減少散熱,在高溫部件表面涂覆專用涂料以降低紅外發(fā)射率,合理設(shè)計(jì)機(jī)身外形來遮擋排氣系統(tǒng)的高溫?zé)岜?遮擋二元噴管和噴流這兩個(gè)高溫系統(tǒng)等。現(xiàn)代無人機(jī)隱身技術(shù)代表性產(chǎn)物有美國X-47B無人機(jī)、法國“神經(jīng)元”無人機(jī)、英國“雷神”無人機(jī)、以色列“哈比”-2無人機(jī)等。
單項(xiàng)隱身技術(shù)通常不能應(yīng)對(duì)除特定探測器外的其他威脅,難以應(yīng)對(duì)日益高精度化、智能化、多元化的探測手段,且往往要在氣動(dòng)、結(jié)構(gòu)等多方面進(jìn)行協(xié)調(diào)折中,從而影響無人機(jī)性能。因此,對(duì)無人機(jī)隱身技術(shù)提出了更高的要求,隨之涌現(xiàn)了一些新型隱身技術(shù),其中,等離子體隱身技術(shù)以其獨(dú)有的優(yōu)勢迅速成為該領(lǐng)域重要發(fā)展方向。
等離子體由大量正電離子、自由電子、中性原子組成,整體呈中性,但有較強(qiáng)導(dǎo)電性。該技術(shù)采用等離子體發(fā)生器或放射性同位素,使得機(jī)體表面形成一層等離子云,由外部發(fā)射的探測電磁波及內(nèi)部輻射的紅外電磁波到達(dá)等離子云層,等離子云層將電磁波的一部分吸收,另一部分改變傳播方向散射,這一方面可以降低機(jī)體的雷達(dá)、紅外探測特性從而實(shí)現(xiàn)隱身,另一方面可以對(duì)敵探測系統(tǒng)起欺騙誘導(dǎo)作用。該技術(shù)無須改變無人機(jī)氣動(dòng)外形設(shè)計(jì),從而最大程度地保證了無人機(jī)的性能。目前,俄羅斯在該技術(shù)方面處于世界領(lǐng)先地位,其第三代等離子產(chǎn)品已經(jīng)應(yīng)用于“米格”-1.44隱身戰(zhàn)機(jī),該產(chǎn)品可在4~4 GHz頻率范圍內(nèi)使飛機(jī)雷達(dá)散射截面減小99%。
3.2
自主導(dǎo)航
目前,軍用作戰(zhàn)無人機(jī)采用的導(dǎo)航技術(shù)主要是慣性導(dǎo)航、衛(wèi)星導(dǎo)航、多普勒導(dǎo)航、地圖匹配導(dǎo)航及地磁導(dǎo)航。由于各種導(dǎo)航技術(shù)各有利弊,現(xiàn)有軍用作戰(zhàn)無人機(jī)導(dǎo)航大多融合多種導(dǎo)航技術(shù),利用它們的互補(bǔ)特性來形成更高性能的組合導(dǎo)航。考慮未來高電磁復(fù)雜度、高電通對(duì)抗條件的戰(zhàn)場環(huán)境,衛(wèi)星導(dǎo)航易受干擾、欺騙,有源導(dǎo)航易被偵察反制,無人機(jī)必須在不依賴外界衛(wèi)星導(dǎo)航信息和保持對(duì)外電磁靜默的情況下,實(shí)現(xiàn)高精度的導(dǎo)航,快速準(zhǔn)確地到達(dá)預(yù)定作戰(zhàn)區(qū)域。
因此,需開展包括視覺導(dǎo)航、天文導(dǎo)航、慣性導(dǎo)航、地圖匹配導(dǎo)航及地磁導(dǎo)航等自主、隱蔽、抗干擾、靜默無源的全源組合導(dǎo)航技術(shù)的研究。鑒于傳統(tǒng)導(dǎo)航定位技術(shù)在精度、環(huán)境適應(yīng)性、體積、計(jì)算量等方面存在的問題,還需積極發(fā)展新型高性能、輕小化導(dǎo)航技術(shù),比如基于MEMS、半球諧振陀螺的慣性導(dǎo)航、數(shù)據(jù)庫匹配導(dǎo)航、仿生導(dǎo)航、量子無源導(dǎo)航等,并立足于實(shí)戰(zhàn)應(yīng)用,通過深度強(qiáng)化對(duì)各種戰(zhàn)場環(huán)境、不同運(yùn)動(dòng)狀態(tài)的學(xué)習(xí),有效提取全作戰(zhàn)過程時(shí)空的高級(jí)特征,避免進(jìn)入局部最優(yōu)狀態(tài),實(shí)現(xiàn)基于深度強(qiáng)化學(xué)習(xí)的離散動(dòng)作空間的自適應(yīng)切換與快速重構(gòu)的組合導(dǎo)航系統(tǒng),以確保無人機(jī)面對(duì)不同環(huán)境時(shí),能實(shí)時(shí)自主做出最優(yōu)的導(dǎo)航組合策略,保證其自主導(dǎo)航的魯棒性和精確性;結(jié)合深度學(xué)習(xí)與數(shù)據(jù)融合技術(shù),實(shí)現(xiàn)動(dòng)態(tài)時(shí)變戰(zhàn)場環(huán)境及障礙物的實(shí)時(shí)感知,統(tǒng)籌全局與局部路徑規(guī)劃方法,研究基于導(dǎo)航信息、環(huán)境類型、障礙物類型的自適應(yīng)路徑規(guī)劃技術(shù),完成復(fù)雜環(huán)境下面臨動(dòng)態(tài)/靜態(tài)/遠(yuǎn)/近等多種障礙物的實(shí)時(shí)避障及合理路徑規(guī)劃功能,從而解決無人機(jī)自主飛行的三個(gè)基本問題,即“我的周圍環(huán)境怎么樣”“我在哪里”“我下一步該怎么做”。
3.3
OODA環(huán)路自主
OODA環(huán)路自主化的目的是結(jié)合人工智能技術(shù)賦能OODA環(huán)路節(jié)點(diǎn),提高人在回路中模式的效率,縮短其循環(huán)周期,以適應(yīng)高烈度、強(qiáng)對(duì)抗的作戰(zhàn)需求,本文將OODA環(huán)路劃分為自主目標(biāo)識(shí)別判斷(即感知和判斷)和自主攻擊(即決策和行動(dòng))。
1)自主目標(biāo)識(shí)別判斷。自主目標(biāo)識(shí)別判斷是無人機(jī)遂行自主攻擊、毀傷評(píng)估等后續(xù)動(dòng)作的前提和基礎(chǔ)。未來戰(zhàn)爭中,隨著目標(biāo)隱身性能、機(jī)動(dòng)性能和干擾場景復(fù)雜度不斷提高,導(dǎo)致目標(biāo)數(shù)據(jù)具有稀疏性、不確定性、多變性等特點(diǎn),因此,對(duì)目標(biāo)探測識(shí)別提出了更高要求。傳統(tǒng)目標(biāo)識(shí)別方法一般針對(duì)特定的目標(biāo)和環(huán)境,采用人工識(shí)別或者基于人工標(biāo)定目標(biāo)特征的機(jī)器識(shí)別,存在識(shí)別目標(biāo)特征信息維度低,實(shí)時(shí)信息處理能力不足,應(yīng)用場景單一,泛化性能不足等缺點(diǎn),且面對(duì)弱隱目標(biāo)時(shí),單一傳感器無法客觀準(zhǔn)確地提取目標(biāo)特征。因此,需攻克基于多探測信息融合的弱監(jiān)督深度學(xué)習(xí)的自主目標(biāo)識(shí)別技術(shù),研究基于復(fù)雜戰(zhàn)場環(huán)境的三維場景孿生建模及圖像仿射變換、裁剪與拼接的樣本增廣技術(shù)及樣本動(dòng)態(tài)可擴(kuò)充模型,構(gòu)建場景豐富、多視角、高維度的目標(biāo)樣本,為基于弱監(jiān)督深度學(xué)習(xí)算法模型的目標(biāo)識(shí)別能力訓(xùn)練和增量推理學(xué)習(xí)提供充足的數(shù)據(jù)支撐;研究多源異構(gòu)信息數(shù)據(jù)質(zhì)量定準(zhǔn)、信息相似性計(jì)算、信息多義性處理、信息關(guān)聯(lián)處理技術(shù),結(jié)合深度學(xué)習(xí)與數(shù)據(jù)融合技術(shù),深度挖掘多源異構(gòu)信息的有效特征信息,實(shí)現(xiàn)面向低特征目標(biāo)的多維/多源異構(gòu)信息融合的自主目標(biāo)識(shí)別能力;結(jié)合深度學(xué)習(xí)與專家知識(shí)系統(tǒng),實(shí)現(xiàn)目標(biāo)行為自主理解與判斷、戰(zhàn)場態(tài)勢判斷,支撐后續(xù)自主打擊決策生成環(huán)節(jié);研究輕量化算法模型,減少計(jì)算復(fù)雜度及所需資源,實(shí)現(xiàn)理論向?qū)嵺`的轉(zhuǎn)換,縮短OODA環(huán)路中的感知判斷時(shí)間。
2)自主攻擊。受倫理、人道主義等約束,至今,真正意義上“人在環(huán)路外”的完全自主的攻擊型武器系統(tǒng)是不存在的,大多數(shù)作戰(zhàn)無人機(jī)都需要在操作員的控制下實(shí)施攻擊任務(wù),按照機(jī)器人不能剝奪人的生命權(quán)的原則,應(yīng)保證人在作戰(zhàn)過程中的主體地位,體現(xiàn)人對(duì)無人機(jī)的絕對(duì)控制能力,其中最主要的就是將開火“扳機(jī)”掌握在人手里。因此,無人機(jī)的“自主攻擊”決策應(yīng)該完全符合人的意識(shí),需要研究基于專家知識(shí)系統(tǒng)的智能自主攻擊,模仿人類整體決策功能。雖然單純的專業(yè)知識(shí)在具有較強(qiáng)的相關(guān)線索性及較好的狀態(tài)區(qū)分度的作戰(zhàn)環(huán)境中可以產(chǎn)生有效的決策,但在復(fù)雜的非結(jié)構(gòu)化戰(zhàn)場環(huán)境中,將不可避免地產(chǎn)生模糊性、滯后性、偏差性。因此,需要對(duì)基于專家知識(shí)系統(tǒng)的攻擊規(guī)則、條件等進(jìn)行提煉、賦值,形成改進(jìn)知識(shí),在滿足約束條件時(shí)快速形成攻擊決策,并根據(jù)時(shí)變作戰(zhàn)環(huán)境進(jìn)行動(dòng)態(tài)實(shí)時(shí)決策重構(gòu),以確保無人機(jī)在非結(jié)構(gòu)化作戰(zhàn)環(huán)境中自主做出的攻擊決策具備實(shí)時(shí)性、可預(yù)測性、可解釋性。同時(shí),應(yīng)突破基于深度學(xué)習(xí)的智能飛控技術(shù),無人機(jī)能實(shí)現(xiàn)根據(jù)戰(zhàn)場環(huán)境、目標(biāo)態(tài)勢、攻擊決策等進(jìn)行多控制模式在線切換重構(gòu)的能力,使其遂行決策自主化、控制智能化的自主攻擊任務(wù),縮短OODA環(huán)路中的決策和行動(dòng)時(shí)間。
4 結(jié)束語
在新軍事革命背景下,戰(zhàn)爭形態(tài)由信息化向智能化、無人化轉(zhuǎn)變,因此,智能無人化作戰(zhàn)將成為未來戰(zhàn)爭的主要形式,而無人機(jī)作戰(zhàn)作為無人化作戰(zhàn)主要形式之一,勢必在未來軍事發(fā)展中占有舉足輕重的位置。本文檢索研究大量文獻(xiàn),通過分析發(fā)現(xiàn)現(xiàn)代無人機(jī)作戰(zhàn)樣式的不足,通過對(duì)標(biāo)未來戰(zhàn)爭特別是防空行動(dòng)中反無人機(jī)技術(shù)發(fā)展方向,對(duì)軍用作戰(zhàn)無人機(jī)的隱身、自主導(dǎo)航、OODA環(huán)路自主方面提出建議,希望為軍用作戰(zhàn)無人機(jī)及其作戰(zhàn)樣式的后續(xù)發(fā)展提供參考。
| 作? ?者:薛德鑫,單濤, 徐寧駿, 郭浩, 董士軍, 董紹陽
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論